

Вопросы и задания для самопроверки
1. Из каких элементов состоит электроэнергетическая система?
2. Дайте определение режимов и процессов.
3. Перечислите различные виды режимов и процессов в электроэнергетических системах.
4. Что понимается под статической, динамической и результирующей устойчивостью электроэнергетической системы?
5. Дайте определение малых и больших возмущений режима.
6. Нелинейность и ее виды в электроэнергетической системе.
7. Перечислите параметры режима и параметры системы и дайте их определение.
8. По каким признакам различаются переходные процессы?
9. Чем отличаются линейные и нелинейные параметры режимов и системы?
10. Как влияет насыщение магнитной цепи синхронной машины на амплитуду угла при качаниях?
11. Дайте определение понятия «период качания».
2. Статическая устойчивость электроэнергетических
СИСТЕМ
2.1. Векторная диаграмма и соотношения между параметрами
в простейшей электроэнергетической системе
с неявнополюсным генератором
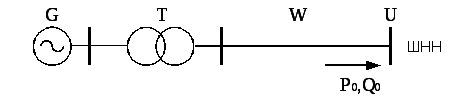
Шины неизменного напряжения (ШНН) – узловая точка в системе, напряжение в которой остается величиной постоянной как по модулю, так и по частоте. Режим простейшей ЭЭС характеризуется напряжением на шинах приемной системы, значениями ЭДС генераторов данной станции, значениями активной и реактивной мощности в конце (в начале) системы (рис. 2.1).
а
б
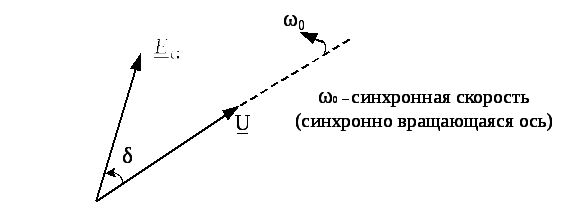
Рис. 2.1. ЭЭС с неявнополюсным генератором:
а – простая схема; б – векторная диаграмма
На схеме замещения переходного процесса (рис. 2.2) представлены Eq, E′, Uг эквивалентного неявнополюсного генератора (НЯСГ).Eq – синхронная ЭДС или ЭДС холостого хода, которая обусловливается (и пропорциональна) током возбуждения генератораif. В нерегулируемых машинах (где нет автоматического регулирования возбуждения (АРВ)) синхронная ЭДСEq = const при любых медленных изменениях режима, поэтому, когда требуется проводить ряд расчетов для генератора при неизменном токе возбуждения, удобно в схему замещения вводитьEq = const, которая расположена за синхронной индуктивностьюxd. При неучете потерь в стали магнитопровода генератора эта ЭДС во всех режимах неизменна. При учете –Eq определяется соответствующими характеристиками холостого хода. Таким образом,Eq≡if , Eq = const.

Рис. 2.2. Схема замещения простейшей электроэнергетической системы
с неявнополюсным генератором
E′– переходная
ЭДС, обусловлена результирующим
потокосцеплением, сцепленным с обмоткой
возбуждения, в схеме замещения генератора
располагается за переходным сопротивлениемxd'.
Поперечная составляющая![]() в момент резких изменений режима работы
синхронной машины сохраняет предшествующее
значение,
в момент резких изменений режима работы
синхронной машины сохраняет предшествующее
значение,![]() =
=![]() .
ЭДСE′q является расчетной
величиной, позволяет связывать параметры
нормального режима системы с параметрами
после нарушения режима. При выполнении
практических расчетов
.
ЭДСE′q является расчетной
величиной, позволяет связывать параметры
нормального режима системы с параметрами
после нарушения режима. При выполнении
практических расчетов![]() позволяет анализировать НЯСГ,
оснащенный автоматическими регуляторами
возбуждения (АРВ) пропорционального
действия (АРВПД):E′ ≡
позволяет анализировать НЯСГ,
оснащенный автоматическими регуляторами
возбуждения (АРВ) пропорционального
действия (АРВПД):E′ ≡![]() рез
,
рез
,![]() = const.
= const.
Uг– напряжение на шинах генератора, его поперечная составляющаяUгq используется для анализа переходного процесса НЯСГ с АРВ сильного действия (АРВСД), поэтому когда требуется провести анализ при переходном процессе с АРВСД, то генератор представляетсяUгq= const иxг = 0.
Для анализа и расчетов указанных режимов строим векторную диаграмму НЯСГ (рис. 2.3), на которой совмещаем ось xс напряжениемU. ИзвестныP0,Q0, подтекающие к шинам неизменного напряжения. Следовательно, можно определить ток, который при активно – индуктивной нагрузке будет отставать на угол φ.
Здесь суммарные сопротивления определяются как
![]() и
и ![]() ,
,
где внешнее сопротивление xвн (иначе сопротивление сети –xс) по схеме замещения(рис. 2.2) состоит из элементов сети:
![]()

Рис. 2.3. Векторная диаграмма эквивалентного
неявнополюсного синхронного генератора с активно-индуктивной нагрузкой
Заметим, что по величине
![]() и, следовательно,
и, следовательно,
![]() .
.
Выразим из векторной диаграммы соотношения между мощностью, отдаваемой генератором в систему в различных режимах работы, и характерными значениями E,Uиx(рис. 2.3):
![]() ;
(2.1)
;
(2.1)
![]() ;
(2.2)
;
(2.2)
![]() .
(2.3)
.
(2.3)
Домножим обе части уравнения на U:
![]() ;
(2.1′)
;
(2.1′)
![]() ;
(2.2′)
;
(2.2′)
![]() .
(2.3′)
.
(2.3′)
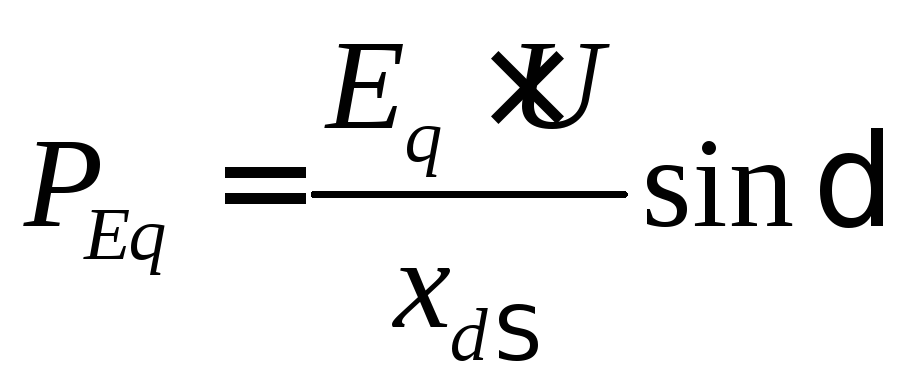
Так как IaU =P, то из (2.1′) – (2.3′) получим выражения мощности
 ,
(2.4)
,
(2.4)
 ,
(2.5)
,
(2.5)
 ,
(2.6)
,
(2.6)
где P – активная мощность, передаваемая статорной цепью СМ со стороны ротора, определяет наличие момента на валу и скорость вращения ротора;
![]() –внутренняя
электромагнитная мощность генератора.
–внутренняя
электромагнитная мощность генератора.
Положение Eqна векторной диаграмме связано с осьюq;![]() – пространственная электромеханическая
координата. Угол
– пространственная электромеханическая
координата. Угол![]() – угол междуЕqиU,определяет
режим работы генератора и характеризует
значение активной мощностиР,
отдаваемой в приемную систему; изменяться
скачком не может, так как жестко связан
с инерционной системой ротора. Изменение
– угол междуЕqиU,определяет
режим работы генератора и характеризует
значение активной мощностиР,
отдаваемой в приемную систему; изменяться
скачком не может, так как жестко связан
с инерционной системой ротора. Изменение![]() во времени определяет собой изменение
скорости и ускорение вращения ротора.
во времени определяет собой изменение
скорости и ускорение вращения ротора.
Соответственно:
![]() и
и  .
(2.7)
.
(2.7)
Формула (2.4) удобна для анализа электромеханических процессов.
Это объясняется
тем, что
![]() для НЯСГ выражается через угол
для НЯСГ выражается через угол![]() .
При 90° имеем идеальную предельную
мощность:
.
При 90° имеем идеальную предельную
мощность:
 .
(2.8)
.
(2.8)
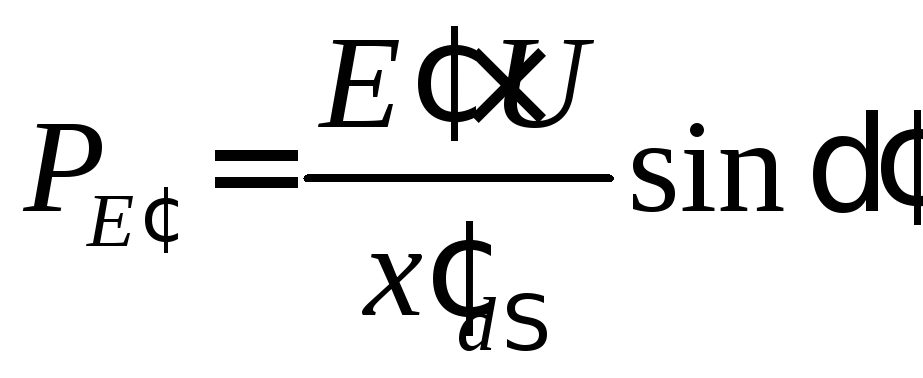
Выражения (2.5),
(2.6) являются менее удобными для анализа
переходных процессов, в силу того, что
в них входят углы
![]() и
и![]() ,
которые не отражают пространственного
положения ротора генератора, так как
не связаны жестко с его инерционной
системой. Поэтому углы могут изменяться
скачком, характеризуя электромагнитное
поведение синхронной машины (СМ).
,
которые не отражают пространственного
положения ротора генератора, так как
не связаны жестко с его инерционной
системой. Поэтому углы могут изменяться
скачком, характеризуя электромагнитное
поведение синхронной машины (СМ).
Выразим (2.5), (2.6)
таким образом, чтобы в них был угол
![]() вместо углов
вместо углов![]() и
и![]() .
.
Рассмотрим выражение
мощности
![]() ,
которое после преобразований имеет вид
,
которое после преобразований имеет вид
![]()
![]() .
(2.9)
.
(2.9)
С учетом соотношений для составляющих
![]() ,
(2.10)
,
(2.10)
![]() ,
(2.11)
,
(2.11)
![]() ,
(2.12)
,
(2.12)
![]() . (2.13)
. (2.13)
Получим мощность вида
![]() . (2.14)
. (2.14)
Проведем дальнейшие преобразования:
![]() ,
,
 .
(2.15)
.
(2.15)
Выразим ток
![]() через
через![]() :
:
![]() .
.
Следовательно,
 .
(2.16)
.
(2.16)
Далее подставляем
выражения (2.10), (2.11), (2.15), (2.16) в (2.14). Получим
значение мощности, выраженной через
![]() ,
в которое будет входить угол
,
в которое будет входить угол![]() ,
а не
,
а не![]() :
:
 (2.17)
(2.17)
Сделаем преобразование:
![]() .
.
Следовательно,
 (2.18)
(2.18)
Таким образом,
выражение для мощности через поперечную
составляющую
![]() применяется вместо выражения (2.5). Хотя
выражение (2.18) более сложное по виду,
чем (2.5), но оно является приемлемым для
анализа электромеханических переходных
процессов неявнополюсных синхронных
машин, оснащенных АРВ пропорционального
действия. Объясняется это тем, что в
(2.18) входит угол
применяется вместо выражения (2.5). Хотя
выражение (2.18) более сложное по виду,
чем (2.5), но оно является приемлемым для
анализа электромеханических переходных
процессов неявнополюсных синхронных
машин, оснащенных АРВ пропорционального
действия. Объясняется это тем, что в
(2.18) входит угол![]() ,
а не
,
а не![]() ,
как в (2.5).
,
как в (2.5).
Чтобы записать
вместо (2.6) выражение мощности через
угол
![]() ,
можем записать из векторной диаграммы
,
можем записать из векторной диаграммы
![]() ,
,
 .
(2.19)
.
(2.19)
Далее подставляем выражения (2.10), (2.11), (2.15) и (2.19) в (2.14) и,
проведя соответствующие преобразования, получим
 .
(2.20)
.
(2.20)
Таким образом, получим (2.20) вместо (2.6), которое также является более удобным для анализа электромеханических переходных процессов неявнополюсных синхронных машин, оснащенных АРВ сильного действия.
Определим реактивную мощность неявнополюсного синхронного генератора. Внутреннюю располагаемую реактивную мощность генератора QEqопределим по выражению
![]() .
(2.21)
.
(2.21)
Выразим
![]() из векторной диаграммы:
из векторной диаграммы:
![]() .
.
Следовательно,
 .
(2.22)
.
(2.22)
Подставляя (2.22) в (2.21), получим выражение для внутренней располагаемой мощности генератора:
 .
(2.23)
.
(2.23)
Реактивная мощность, выдаваемая генератором, определяется по формуле
 ,
где
,
где
 .
(2.24)
.
(2.24)
Модуль ЭДС, входящей в выражение мощностей, находится по формуле
 .
(2.25)
.
(2.25)
Фаза комплекса ЭДС равна
 . (2.25')
. (2.25')
В зависимости от
параметров схемы замещения генератора
его ЭДС и угол расхождения между векторами
![]() и
и![]() будут
иметь значения, представленные в таблице.
будут
иметь значения, представленные в таблице.
Таблицаt
ашин, оснащенных АРи режима, не должны прогрессивного возрастания изменений пар : (
Параметры для неявнополюсного генератора
|
|
Еq |
E' |
Uг |
ЕQ |
|
|
|
|
|
|
|
|
|
|
|
|
ЭДС
![]() и
и![]() определяются из векторной диаграммы:
определяются из векторной диаграммы:
![]() ;
;
![]() .
.