

3.15. Динамическая устойчивость явнополюсного генератора при учете электромагнитных процессов
Для машины с
явновыраженными полюсами, т. е. с
неодинаковыми
![]() и
и![]() ,
расчет усложняется. Затруднение
заключается в том, что вследствие
неравенства
,
расчет усложняется. Затруднение
заключается в том, что вследствие
неравенства![]() и
и![]() машину нельзя представить в виде
эквивалентной схемы замещения. Обычно
поступают следующим образом: вместо
действительной машины для определения
токов и мощности рассматривают фиктивную
машину с одинаковыми индуктивными
сопротивлениями в продольной и поперечной
осях. Причем сопротивление и ЭДС берутся
такими, чтобы активные и реактивные
мощности машины при одном и том же
напряжении на ее выводах
машину нельзя представить в виде
эквивалентной схемы замещения. Обычно
поступают следующим образом: вместо
действительной машины для определения
токов и мощности рассматривают фиктивную
машину с одинаковыми индуктивными
сопротивлениями в продольной и поперечной
осях. Причем сопротивление и ЭДС берутся
такими, чтобы активные и реактивные
мощности машины при одном и том же
напряжении на ее выводах![]() и угле
и угле![]() получились бы такими же, как и у
действительной машины. Эти условия
удовлетворяются, если взять сопротивление
равным сопротивлению
получились бы такими же, как и у
действительной машины. Эти условия
удовлетворяются, если взять сопротивление
равным сопротивлению![]() .
Электродвижущая сила такой фиктивной
машины будет представлена вектором
.
Электродвижущая сила такой фиктивной
машины будет представлена вектором![]() ,
который всегда совпадает с направлением
вектора
,
который всегда совпадает с направлением
вектора![]() .
Таким образом, введя фиктивную ЭДС
.
Таким образом, введя фиктивную ЭДС![]() можно заменить машину с явновыраженными
полюсами эквивалентной машиной с
можно заменить машину с явновыраженными
полюсами эквивалентной машиной с![]() и составить эквивалентную схему замещения
с сопротивлением
и составить эквивалентную схему замещения
с сопротивлением![]() и ЭДС
и ЭДС![]() (рис. 3.26).
(рис. 3.26).
Для такой схемы можно определить собственные и взаимные проводимости и зависимость между токами и напряжениями точно так же, как это было сделано для неявнополюсной машины:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 .
(3.54)
.
(3.54)
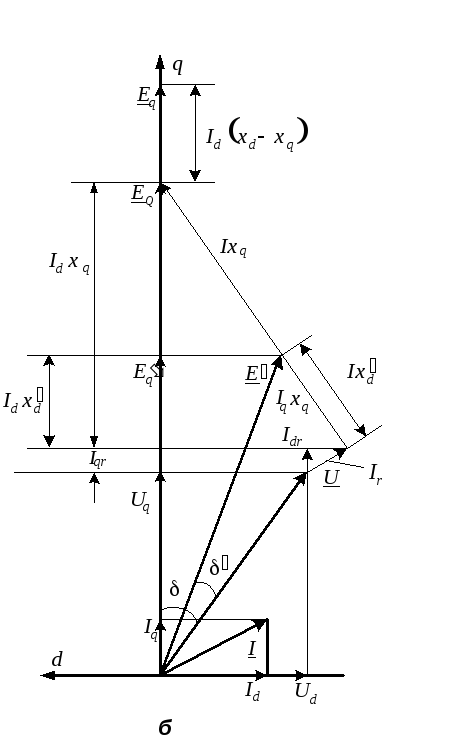
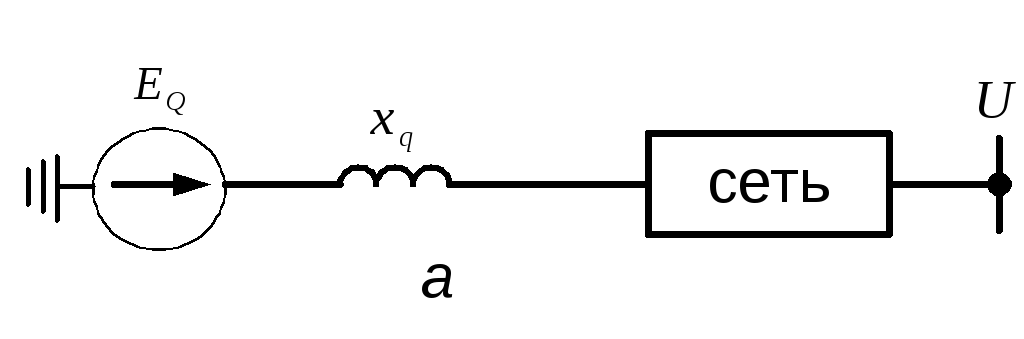
Рис.3.26.Явнополюсная машина: а– Схема системы; б – векторная диаграмма
![]() Дополнительно
для определения изменения ЭДС во времени
необходимо найти
Дополнительно
для определения изменения ЭДС во времени
необходимо найти
![]() в
зависимости от
в
зависимости от![]() и
и![]() .
Из векторной диаграммы имеем
.
Из векторной диаграммы имеем
![]() ,
,
![]() ,
,
откуда
 (3.55)
(3.55)
Ход расчета динамической устойчивости для машин с явновыраженными полюсами сводится к следующему:
1. В нормальном
режиме работы определяют значение
мощности генератора
![]() и угла
и угла![]() ,
продольной составляющей ЭДС за переходным
индуктивным сопротивлением
,
продольной составляющей ЭДС за переходным
индуктивным сопротивлением![]() ,
ЭДС
,
ЭДС![]() и соответствующее ей напряжение на
выводах возбудителя
и соответствующее ей напряжение на
выводах возбудителя![]() .
.
2. Определяют
собственные и взаимные проводимости
ветвей схемы замещения для аварийных
условий (для явнополюсного генератора
берется сопротивление
![]() ).
).
3. При наличии в
схеме возбуждения режима форсировки
строят кривые изменения напряжения на
выводах возбудителя
![]() и соответствующих значений вынужденной
ЭДС
и соответствующих значений вынужденной
ЭДС![]() .
.
4. По уравнению
(3.54) определяют значение фиктивной ЭДС
![]() для первого момента нарушения режима
работы. Значения
для первого момента нарушения режима
работы. Значения![]() и
и![]() берут по данным расчета нормального
режима:
берут по данным расчета нормального
режима:
 .
.
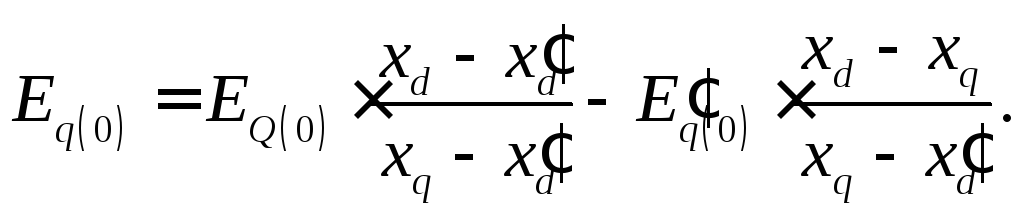
5. По уравнению
(3.55) определяют ЭДС
![]()
6. По уравнению (3.53) находят изменение продольной ЭДС за переходным индуктивным сопротивлением в течение рассматриваемого интервала времени
![]() .
.
7. Определяют
значение
![]() в начале следующего интервала времени
в начале следующего интервала времени
![]() .
.
8. Определяют активную мощность, отдаваемую генератором в сеть
![]() .
.
9. Находят избыток мощности
![]() .
.
10. Определяют изменение угла за рассматриваемый интервал времени:
а) для первого интервала
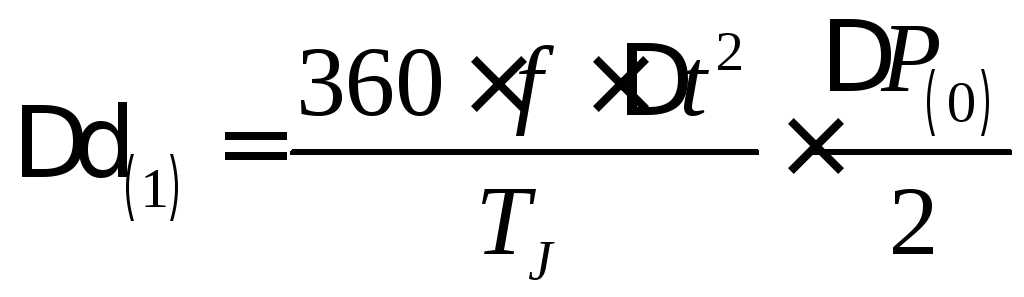 ;
;
б) для последующих интервалов (при наличии скачкообразного изменения электрической мощности генератора)
 .
.
11. Находят угол в начале следующего интервала времени
![]() .
.
Для нового интервала времени расчет повторяется, начиная с пункта 4. Данный алгоритм может быть реализован в виде программы для ЭВМ.