

Проектирование регуляторов на основании разработанных математических моделей и требований к автоматизированному электроприводу
Учитывая, что насосная установка работает с постоянной нагрузкой, применим в нашей системе скалярное частотное управление по закону ψ1 = constсIRкоспенсацией.
При скалярном частотном управлении скорость АД регулируется за счет изменения частоты и амплитуды напряжения. Все законы скалярного управления обеспечивают достижение требуемых статических характеристик и используются в электроприводе со "спокойной" нагрузкой.
Функциональная схема такого частотного управления может быть представлена в следующем виде (рисунок 5.6):
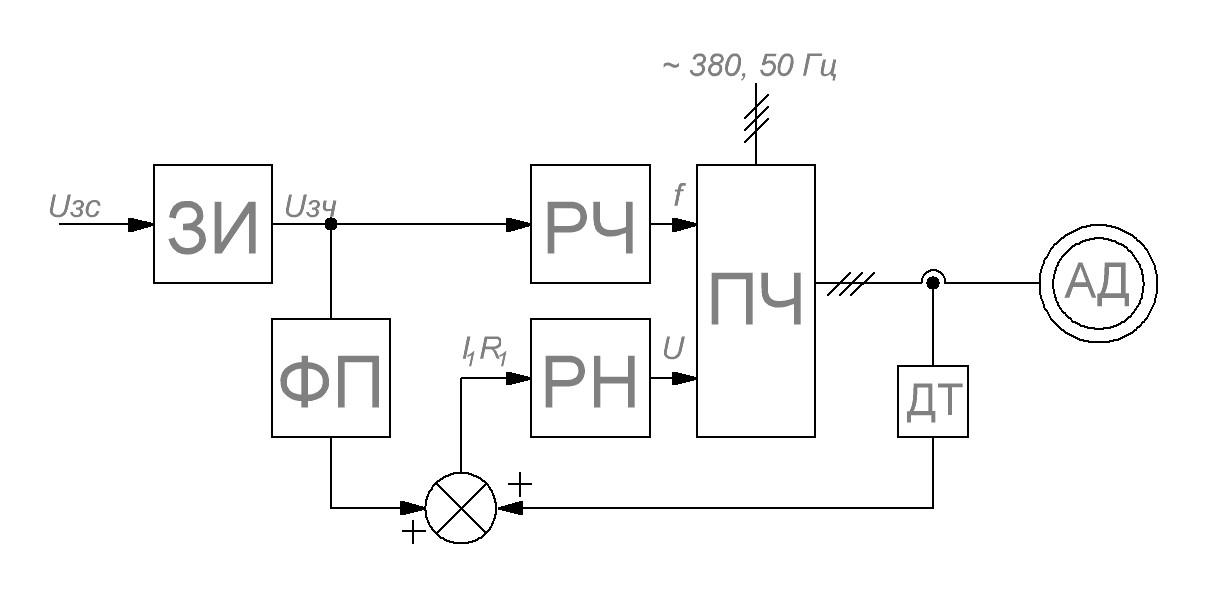
Рисунок 5.6 – Функциональная схема асинхронного электропривод при частотном управлении по закону ψ1 = constсIRкоспенсацией
На схеме введены следующие обозначения:
ЗИ – задатчик интенсивности;
РЧ – регулятор частоты;
РН – регулятор напряжения;
ПЧ – преобразователь частоты;
АД – асинхронный двигатель типа 5АМ250М2;
ДТ – датчик тока;
ФП – функциональный преобразователь;
UЗС– напряжение задания скорости;
UЗЧ– напряжение задания частоты;
f – заданная частота;
U– заданное напряжение.
Согласно подпункту 5.2, в электроприводе турбомеханизма будем использовать ПИ-регулятор давления, имеющий следующую передаточную функцию:
 (5.61)
(5.61)
где
 (5.62)
(5.62)
Постоянная интегрирования регулятора давления:
 (5.63)
(5.63)
где
 (5.64)
(5.64)
 (5.65)
(5.65)
 .
.
Передаточная функция регулятора:
 (5.66)
(5.66)
Коэффициент будет рассчитан по следующей формуле:
 (5.67)
(5.67)
Функциональный преобразователь представлен коэффициентом ke и определяется из выражения:
 (5.68)
(5.68)
Рассчитав все параметры системы, можно изобразить их, подставляя в структурную схему электропривода со стабилизацией напора (рисунок 5.7):

Рисунок 5.7 - Структурная схема электропривода с рассчитанными параметрами системы
Расчет и анализ динамических и статических характеристик автоматизированного электропривода
Разработка компьютерной (имитационной) модели автоматизированного электропривода
На основании выбранной математической модели выполним построение имитационной модели автоматизированного электропривода в среде MATLAB7.8cиспользованием идеализированной модели формирования напряжения на входе блока «Asynchronous Machine SI Units».
На основании структурной схемы электропривода при стабилизации напора составим имитационную модель автоматизированного электропривода, представленную на рисунке 6.1.

Рисунок 6.1 - Имитационная модель автоматизированного электропривода при частотном управлении по закону ψ1=constсIR-коспенсацией, при стабилизации напора в рабочем диапазоне частот
Так как, все необходимые расчеты были выполнены в предыдущем разделе, выполним настройку всех блоков имитационной модели. Некоторые элементы реализованы в виде подсистем при помощи блока "Subsystem". Все подсистемы подсвечены графически и имеют каждая своё название. Целесобразно привести структурные схемы данных блоков.
Так подсистема “frequency converter” представляет собой преобразователь частоты, на вход которой подаётся заданное значение частоты fи амплитуда питающего напряженияUm. Структурная схема представлена на рисунке 6.2:

Рисунок 6.2 - Структурная схема модели подсистемы "frequency converter " – Преобразователь частоты
Определение статического момента представлено выражением, определяющим статический момент электропривода, выражение заключено в подсистему с названием “Momentst”.
На вход подсистемы подаётся отношение текущей скорости к номинальной. Структурная схема приведена на рисунке 6,3:

Рисунок 6.3 - Структурная схема модели подсистемы “Momentst” – Определение статического момента
Действующее значение тока двигателя определяется на основании фазных и координатных преобразований в подсистемах "phase converter" - Преобразователь фаз и "coordinateconverter" - Преобразователь координат. Преобразования выполняются в соответствии со следующими выражениями:
- преобразование из трехфазной системы координат в двухфазную ("phase converter" - Преобразователь фаз):
 (6.1)
(6.1)
где
i1α, i1β- проекции токов статора в системе координатα-β;
i1a, i1b, i1c- мгновенные значения фазных токов обмотки статора;
- преобразование из неподвижной системы координат во вращающуюся систему координат ("coordinateconverter" - Преобразователь координат):
 (6.2)
(6.2)
где
i1x, i1y - проекции токов статора во вращающейся системе координатх-у;
φ - угол поворота системы координат.
Действующее значение тока определяется из выражения
 (6.3)
(6.3)
Структурные схемы моделей подсистем "phase converter" - Преобразователь фаз и "coordinateconverter" - Преобразователь координат представлены на рисунках 6.4 и 6.5 соответственно.

Рисунок 6.4 - Структурная схема модели подсистемы "phase converter" - Преобразователь фаз

Рисунок 6.5 - Структурная схема модели подсистемы "coordinateconverter" - Преобразователь координат
Для моделирования асинхронного двигателя используется стандартный блок AsynchronousMachineSIUnits, расположенный в разделеMachinesбиблиотекиSimPowerSystems. Так как блок имеет широкий диапазон настроек, приведём для наглядности основное окно настроек с используемыми рассчитанными параметрами (рисунок 6.6):

Рисунок 6.6 – Основное окно настройки параметров блока асинхронной машины AsynchronousMachineSIUnits