

5.2. Составление математических моделей (уравнений, структурных схем) объекта управления, датчиков и исполнительного устройства.
Динамические свойства электропривода турбомеханизма в рабочем диапазоне частот можно исследовать с помощью структурной схемы, приведенной на рисунке 5.1 [11].
Это нелинейная система, которую можно использовать при имитационном моделировании. Линеаризуем эту систему для синтеза регулятора Wp, приняв передаточную функцию АД в виде
 (5.1)
(5.1)
а статический момент Мс линейно зависящий от скорости
 (5.2)
(5.2)
где
 (5.3)
(5.3)
 (5.4)
(5.4)
 (5.5)
(5.5)
 (5.6)
(5.6)
 (5.7)
(5.7)
β - модуль жесткости механической характеристики АД при данном статическом моменте,
βс - модуль жесткости механической характеристики турбомеханизма,
Sк.е - критическое скольжение на естественной механической характеристике АД,
Tэ - электромагнитная постоянная времени АД.
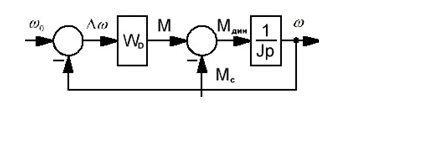
Рисунок 5.1 - Структурная схема электродвигателя: WD - передаточная функция АД.
-
Расчет параметров объекта управления, датчиков и исполнительного устройства
Составим структурную схему электропривода при стабилизации напора, которую представим на рисунке 5.2 [11, с. 190].
Рисунок 5.2 - Структурная схема электропривода
при стабилизации напора в рабочем
диапазоне частот: Wp
- передаточная функция регулятора, WD
- передаточная функция АД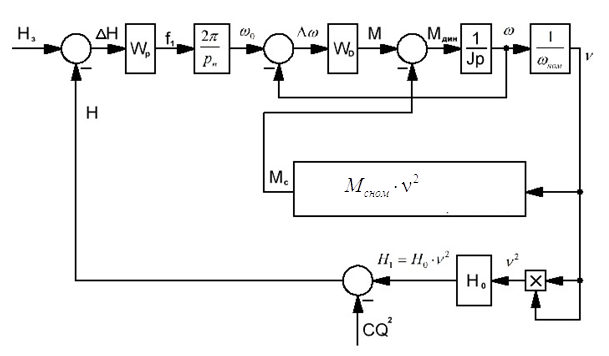
Получаем нелинейную систему, которую удобно использовать при имитационном моделировании. Линеаризованная структурная схема, приведенна на рисунке 5.3, где
 (5.8)
(5.8)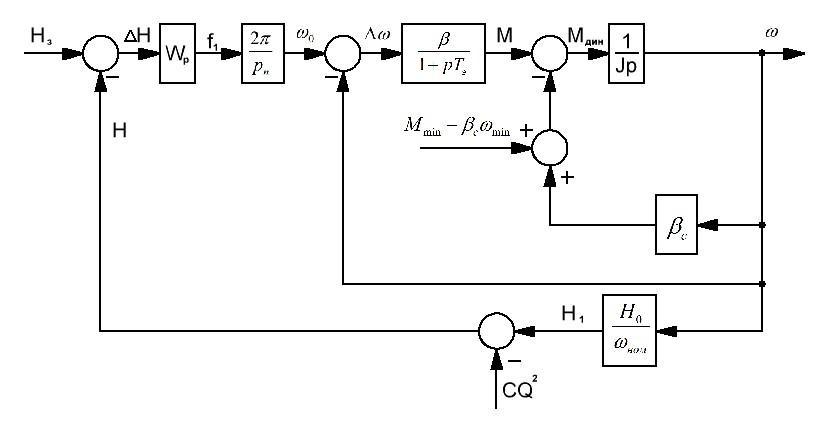
Рисунок 5.3 - Линеаризованная структурная схема электропривода при стабилизации напора в рабочем диапазоне
Структурную схему рисунке 5.3 можно преобразовать к более удобному виду (рисунок 5.4).
Рисунок 5.4 - Преобразованная линеаризованная
структурная схема электропривода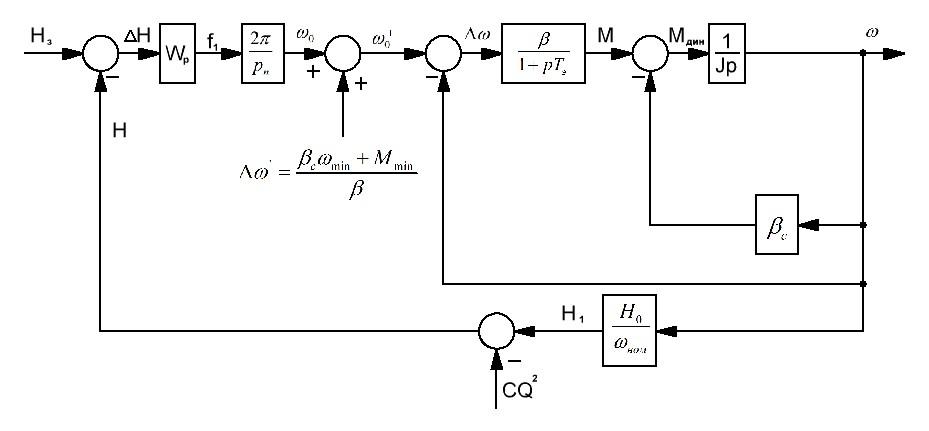
Для структурной схемы рисунок 5.5, полученной из рисунка 5.4, рассмотрим передаточную функцию от возмущающего воздействия Q'L:

Рисунок 5.5 - Окончательный вид линеаризованной структурной схемы
 при Hз(р)=0, (5.9)
при Hз(р)=0, (5.9)
где
 (5.10)
(5.10)
 (5.11)
(5.11)
 (5.12)
(5.12)
Расчёт параметры эквивалентной схемы замещения двигателя:
- номинальные потери мощности:
 .
.
- максимальный электромагнитный момент:
 ;
(5.13)
;
(5.13)
-
коэффициент
 ,
имеющий размерность сопротивления:
,
имеющий размерность сопротивления:
 ;
(5.14)
;
(5.14)
- сопротивление:
 (5.15)
(5.15)
- приведенное активное сопротивление фазы ротора:
 ;
(5.16)
;
(5.16)
- индуктивное сопротивление короткого замыкания:
 ;
(5.17)
;
(5.17)
- критическое скольжение:
 ,
(5.18)
,
(5.18)
величина
критического скольжения асинхронных
двигателей нормального исполнения
находится в пределах
 ;
;
- отношение активных сопротивлений:
 ;
(5.19)
;
(5.19)
- электромагнитный момент при номинальном скольжении:
 ;
(5.20)
;
(5.20)
- погрешность в определении номинального электромагнитного момента:
 .
(5.21)
.
(5.21)
Если
погрешность
 превышает допустимую величину (обычно
принимают 0,01 – 0,05), то корректируем
величину коэффициента загрузки
превышает допустимую величину (обычно
принимают 0,01 – 0,05), то корректируем
величину коэффициента загрузки
 и момент холостого
и момент холостого
 до получения требуемой погрешности.
Когда достигаем требуемой величины
погрешности расчета, находим:
до получения требуемой погрешности.
Когда достигаем требуемой величины
погрешности расчета, находим:
- индуктивное сопротивление фаз статора и ротора:
 ;
(5.22)
;
(5.22)
- потери в стали:
 ;
(5.23)
;
(5.23)
- эквивалентное активное сопротивление намагничивающей ветви:
 ;
(5.24)
;
(5.24)
где
 - ток холостого хода АД;
- ток холостого хода АД;
-
величину
 :
:
 ;
(5.25)
;
(5.25)
- индуктивное сопротивление взаимоиндукции:
 .
(5.26)
.
(5.26)
Индуктивность статора:
 Гн.
(5.27)
Гн.
(5.27)
Индуктивность ротора:
 Гн.
(5.28)
Гн.
(5.28)
Взаимная индукция:
 Гн.
(5.29)
Гн.
(5.29)
Вычислим модуль жесткости линеаризованной статической механической характеристики. Он находится при помощи формулы (5.30) [11, с. 189]:
 .
(5.30)
.
(5.30)
Найдем электромагнитную постоянную времени асинхронного двигателя по формуле:
 .
(5.31)
.
(5.31)
Постоянная времени механизма рассчитывается по формуле:
 (5.32)
(5.32)
где
 - модуль жесткости механической
характеристики турбомеханизма:
- модуль жесткости механической
характеристики турбомеханизма:
 , (5.33)
, (5.33)
Определяем постоянную времени механизма:
 . (5.34)
. (5.34)