

-
Анализ технологического процесса промышленной установки и выбор управляемых координат электропривода.
Насосная установка – комплекс оборудования, обеспечивающий требуемый режим работы одного насоса или нескольких насосных агрегатов. Насосная установка состоит из одного или нескольких насосных агрегатов (рабочие и резервные), трубопроводов, запорной и регулирующей арматуры, контрольно-измерительной аппаратуры, а также аппаратуры управления и защиты[1].
Рисунок.1.3.
Схема узла регулирования отопления.
Насосная установка системы отопления состоит из входного коллектора, к которому через щитовой затвор подведены всасывающие линии двух насосов. Напорные линии насосов объединены напорным коллектором. Один из насосов является основным, второй – аварийным. Функции насосов периодически меняются. Насосную установку с потребителями соединяют напорные водоводы[5].
Вода поступает из системы отопления с давлением 280кПа и температурой 700С, проходя через насосы, давление нагнетается до 319кПа, затем вода поступает на теплообменник и нагревается до температуры 950С и уходит в систему отопления[5].
В процессе эксплуатации насосов возможны изменения основных параметров их работы: могут меняться подача, напор и соответственно потребляемая мощность. Поэтому необходимо располагать данными о взаимосвязи основных параметров насоса в достаточно широком диапазоне их изменения. Зависимость напора от подачи H(Q) называется напорной или главной характеристикой. Характеристики насосов необходимы потребителю для подбора оборудования, определения условий монтажа и эксплуатации, согласования параметров насоса с параметрами сети.
Особенности работы насосной установки:
1. система водоснабжения предусматривает установку двух насосов (1 насос рабочий, 1 насос резервный);
2. основной и резервные насосы должны быть одинаковы и взаимозаменяемы;
3. так как подача воды осуществляется в одном определенном направлении, то реверс привода недопустим;
4. режим работы – непрерывный;
Исходя из вышеизложенных особенностей технологического процесса управляемой координатой электропривода выбираем скорость в зависимости от давления в трубопроводе.
Если в процессе работы насоса изменяется сопротивление системы, рабочая точка смещается влево от рассчитанной (Рисунок 1.4). Происходит уменьшение подачи теплоносителя и увеличение силы напора насоса, что приводит к возникновению шума в клапанах.
Решить эту проблему позволяет использование насосов с автоматическим регулированием скорости вращения ротора. В насосах с частотным преобразователем при уменьшении скорости вращения снижается уровень подачи, при этом уменьшаются гидравлическое сопротивление системы и потребляемая мощность, что приводит не только к бесшумной работе, но и к значительной экономии энергии и увеличению эксплуатационного срока службы насоса.
Зависимость напора насоса от расхода представлена на рисунке 1.4.
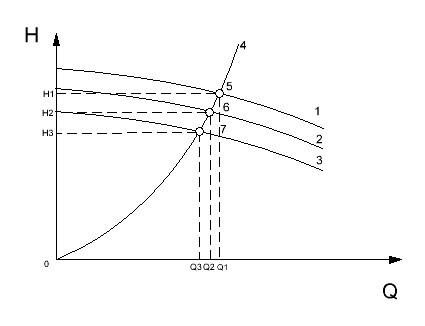
Рисунок 1.4 – Зависимость напора насоса от расхода
На рисунке 1.4 обозначены:
1
- характеристика
 насоса при номинальной частоте вращения;
2,3 - характеристики
насоса при номинальной частоте вращения;
2,3 - характеристики
 насоса при пониженной частоте вращения;
насоса при пониженной частоте вращения;
-
Формулирование требований к автоматизированному электроприводу.
Основные технологические требования к электроприводу насоса:
-
основным
требованием к автоматизированному
электроприводу является высокоэффективность
перекачивания, при производительности
Qном=50 .
.
-
стабилизация напора на уровне
 ;
;
- плавность пуска, помогающего избежать пиков давления, которые превышают номинальное, и вытекающей отсюда нагрузки на выходные трубы. Это снижает риск повреждений и утечки, а также внезапных колебаний давления, которые вызывают вибрацию труб, сопровождаемую звуками, напоминающими стук молотка, называемые обычно "трамбовкой". Интенсивная трамбовка может даже вызвать разрыв труб, в то время как внезапное понижения давления может, наоборот, вызвать вдавливание. Кавитация может также вызвать коррозию трубопровода. Постепенная, а не внезапная остановка насосов к тому же предотвращает одинаково вредные для труб пики давления. Более того, она снижает износ подшипников и редукторов насоса.
Особых требований к статизму характеристик не предъявляется.
Требования, предъявляемые к системе управления электроприводом, формируются исходя из требований обеспечения функционирования и управляемости технологическим процессом.
- в системе управления электроприводом должен быть резервный режим питания электродвигателя в обвод преобразователя частоты – байпас. Байпас – режим в котором преобразователь выключен, а электропривод работает напрямую. Байпас включается при сигнале “авария”, отключая при этом преобразователь частоты от электродвигателя;
- удобство наладки. Использование блочной архитектуры. Это обеспечит быстроту изменения функционирования промышленной установки, а также оперативную замену вышедших из строя элементов;
- надежность системы. Соответствие этому требованию позволит обеспечить безопасность функционирования промышленной установки;
- в случае отказа преобразователя система должна перейти в режим нерегулируемого насоса или должна обеспечить включение резервного насоса при увеличении потребления воды выше возможностей одного насоса или при выведении его из строя;
- требования к массогабаритным показателям;
- высокие энергетические показатели. Обеспечение этого требования является следствием экономии электроэнергии;
- требования техники безопасности и охраны труда;
- требования противопожарной безопасности;
- защита от радиопомех и подавление собственных радиопомех (использование экранированных проводов, а также применение реакторов на входе силовой схемы);
- пылезащищенность и влагозащищенность не ниже IP44.
2. ПРОЕКТИРОВАНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА
2.1. Обзор систем электропривода, применяемых в промышленной установке.
В современных отечественных и зарубежных системах регулирование режимов работы насосных установок осуществляется посредством автоматизированного регулируемого электропривода. В таких системах регулируемым параметром является напор жидкости. Современное развитие техники позволяет поддерживать заданный напор с большой точностью. Однако высокая точность влечет за собой непрерывное изменение частоты вращения электродвигателя насосного агрегата и вследствие этого способствует возникновению знакопеременных нагрузок на отдельные элементы насосного агрегата (эластичные муфты, соединяющие насос с двигателем и др.), ведущих к преждевременному их износу. Поэтому в ряде случаев приходится устанавливать повышенную зону нечувствительности системы регулирования, что понижает точность стабилизации напора.
Возможность управления частотой вращения асинхронных электродвигателей была доказана сразу же после их изобретения. Реализовать эту возможность удалось лишь с появлением силовых полупроводниковых приборов - сначала тиристоров, а позднее транзисторов IGBT. В настоящее время во всём мире широко реализуется способ управления асинхронной машиной, которая сегодня рассматривается не только с точки зрения экономии энергии, но и с точки зрения совершенствования управления технологическим процессом!
Управление электродвигателями переменного тока осложнено рядом обстоятельств, из которых наиболее существенные это:
- момент электродвигателя определяется произведением двух результирующих векторов электромагнитных параметров статора и ротора и является функцией четырех переменных;
- имеется сильное взаимодействие намагничивающих сил статора и ротора, взаимное состояние которых непрерывно меняется при вращении ротора;
- с целью лучшего использования двигателя в различных режимах его работы возникает задача регулирования магнитного потока двигателя.
Требования к электроприводу определяются диапазоном регулирования скорости и типом нагрузки. Зависимость между скоростью вращения и моментом сопротивления неодинаковы для нагрузок разного типа.
Некоторые виды нагрузки имеют переменную механическую характеристику, для которой момент нагрузки возрастает с увеличением скорости вращения. Типичным примером устройств с такой нагрузкой являются насосы, чья механическая характеристика описывается уравнением квадратичной параболы, а значит, потребляемая мощность пропорциональна кубу скорости вращения. Из этого следует, что даже небольшое снижение скорости электропривода может дать значительный выигрыш в мощности - вот почему экономия электроэнергии является главным преимуществом использования управляемого электропривода для насосов. Теоретически снижение скорости на 10% даёт тридцати процентную экономию мощности.
Использование регулируемого электропривода в турбомеханизмах позволяет выиграть следующих моментах:
- высокий коэффициент мощности (cosφ) помогает снизить затраты на потребляемую электроэнергию;
- за счет ликвидации токовых пиков при запуске отпадает необходимость в электрических кабелях большого сечения, в то время как двигатели с прямым подключением к сети питания поглощают ток, в 6-7 раз превышающий номинальное значение. Таким образом, можно избежать опасности поражения большими токами, а так же снизить расходы при установке и прокладке;
- отсутствие необходимости в техобслуживании: инвертор не требует техобслуживания, так как состоит из статических элементов;
- экономия электроэнергии от 30 до 60%.
Проектирование различных систем водоснабжения с использованием регулируемого асинхронного электропривода позволяет оптимизировать их состав, обеспечить уменьшение их стоимости и существенную экономию электроэнергии при эксплуатации.