

writing guide - 32.10
32.5.4 Calculations
Calculations are required to justify the design work. These should follow the conventions used in EGR 345. When computer programs are written, they should be commented and included.
32.6APPENDICES
32.6.1Appendix A - Sample System
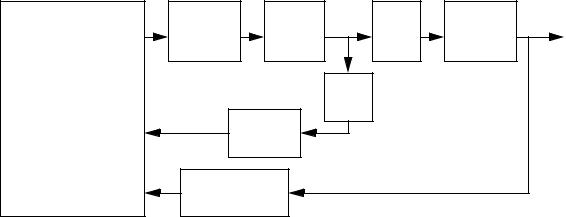
The example system in Figure 32.2 is to control a cart with a hanging pendulum. The cart is driven by a motor. The motor has an attached encoder to measure the motor position. As the cart moves the mass underneath may sway. The position of the hanging mass is measured with a potentiometer.
68HC11 |
PWM |
|
H-bridge |
Vs Motor |
ω |
cart |
x |
hanging |
θ |
mass |
|
|
|
|
|
|
mass |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
quadrature |
|
1 |
|
|
|
|
||
|
|
|
--- |
|
|
|
|
|||
Digital in |
input |
|
D |
|
|
|
|
|||
|
|
encoder |
|
|
|
|
|
|
||
motor position |
|
|
θ |
|
|
|
|
|
||
|
|
|
motor |
|
|
|
|
|||
Analog in |
Vθ |
potentiometer |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||||
mass angle |
|
|
|
|
|
|
|
|
|
|
Figure 32.2 System Architecture
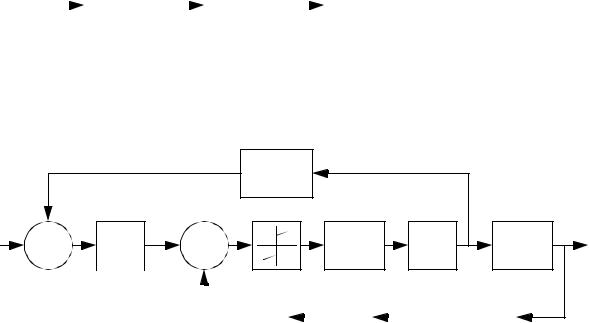
A block diagram for the system is shown in Figure 32.3. A motion generator is used to generate a smooth path for the mass. There are two feedback control loops. The first loop adjusts the motor for general positioning of the system. The inner loop adjusts the output to reduce sway of the cart. The two control signals are added to produce a command signal the drives the load to the final position and then reduces vibrations.
writing guide - 32.13
|
|
|
|
· |
|
|
K2 |
|
|
|
|
|
|
K |
|
|
Fwrw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
ω w + ω |
w |
------ |
|
|
= Vs |
----- |
– |
------------ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
JR |
|
|
|
|
|
|
|
JR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Fw = Vs |
K |
|
– ω |
· |
|
|
J |
|
– ω |
|
K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
w |
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-------- |
|
|
|
---- |
|
|
|
-------- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rwR |
|
|
|
|
|
rw |
|
|
|
rwR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
given |
|
|
|
x |
|
= θ wrw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
·· |
J |
|
|
|
|
· |
|
K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Fw = Vs |
-------- |
|
– x |
2 |
– x |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rwR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) ---> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rw |
|
|
|
|
rwR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
·· |
|
|
|
|
|
· |
|
K2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
·· |
|
|
|
|
|
|
|
|
|
|
|
|
· 2 |
|
|
|
|
·· |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
– Mcx + ( Mpg cos θ L + θ |
L Mpl – x sin θ |
LMp) sinθ |
L + Vs |
-------- |
– x |
---- |
|
|
|
|
-------- |
|
|
= 0 |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
– x |
|
|
2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rwR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rw |
|
|
|
|
rwR |
|
|
|
|
|
|||||
|
|
·· |
|
|
J |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
· 2 |
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
· K2 |
|
|
|
|||||||||||
|
|
|
|
|
|
---- |
+ ( sin θ |
L) |
|
Mp + cos θ |
L sin θ |
LMpg + θ L ( Mpl sin θ |
L) + Vs |
-------- |
|
|
– x |
-------- |
|
= 0 |
|||||||||||||||||||||||||||||||||||||||||
– x Mc + 2 |
|
|
|
|
|
|
2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
rw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rwR |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
r2 |
|
|
|
|
|
|
) 2M |
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rwR |
|
|
|
|
|||||||
·· |
M |
c |
+ J + ( sin θ |
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
· |
2 |
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
· |
|
|
K |
2 |
|
|||||||||||||||||
|
|
w |
|
|
|
|
|
|
L |
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
x |
-------------------------------------------------------------- |
= ( cos θ L sin θ L) Mpg + θ L |
|
( Mpl sin θ |
L) + Vs |
-------- |
|
|
– x |
-------- |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
rw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rwR |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rwR |
||||||
·· |
( cos θ |
|
sin θ |
) |
|
|
|
|
|
|
|
|
Mpgrw2 |
|
|
|
|
|
|
|
|
|
+ θ |
· |
2 |
|
|
|
|
|
Mpl sin θ |
Lrw2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
x = |
|
|
-------------------------------------------------------------- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
L |
|
L |
|
|
|
|
L |
|
|
-------------------------------------------------------------- |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
M |
c |
r2 |
+ J + ( sin θ |
|
) 2M |
p |
r2 |
|
|
M |
c |
r2 |
+ J + ( sin θ |
L |
) 2M |
p |
r2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
L |
|
|
|
|
w |
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Krw |
|
|
|
|
|
|
|
|
|
|
· |
|
|
|
|
|
|
|
|
–K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ x |
----------------------------------------------------------------------- |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
----------------------------------------------------------------------- |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
s R( M |
c |
r2 |
+ J + ( sin θ |
|
) 2M |
p |
r2 ) |
|
R( M |
c |
r2 + J + ( sin θ ) 2M |
p |
r2 ) |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
L |
|
|
|
w |
|
|
|
|
|
|
|
|
w |
|
|
|
|
L |
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|||||||||
Figure 32.5 Adding the differential equation for the motor
writing guide - 32.14
State Equations: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
· |
= v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
· |
|
|
|
|
|
|
|
|
|
–K2 |
|
|
|
|
|
|
( cos θ |
|
sin θ |
|
|
|
|
|
Mpgrw2 |
|
|
|
|
|
|
|||
v |
|
= v |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
) |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
R-----------------------------------------------------------------------( M |
|
r2 |
+ J + ( sin θ ) 2M |
|
r2 ) |
|
|
|
L |
|
|
L |
|
|
-------------------------------------------------------------- |
|||||||||||||||
|
|
|
|
c |
p |
|
|
|
|
|
M |
c |
r2 + J + ( sin θ |
) 2M |
p |
r2 |
|
|||||||||||||||||
|
|
|
|
|
|
w |
|
|
|
L |
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
w |
L |
|
|
w |
|||||
|
|
|
|
+ ω |
2 |
|
|
|
Mpl sin θ |
Lrw2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Krw |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
L M-------------------------------------------------------------- |
|
r2 + J + ( sin θ |
|
2M |
|
r2 |
|
|
|
----------------------------------------------------------------------- |
|
||||||||||||||||
|
|
|
|
|
|
|
c |
) |
p |
|
|
s R( M |
c |
r2 |
+ J + ( sin θ ) |
2M |
p |
r2 ) |
|
|||||||||||||||
θ·L |
|
|
|
|
|
|
w |
|
|
|
L |
|
w |
|
|
|
|
|
w |
L |
|
w |
|
|
||||||||||
= |
ω L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
· |
|
|
–g |
|
|
|
· |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
L |
= |
|
θ L |
v cos θ |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
----- sin |
– ----------------- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
l |
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 32.6 State equations for the system
A Scilab program that simulates the given system is given in Figure 32.7.
writing guide - 32.16
// The motion profile generator
function foo=motion(t_start, t_end, t_now, C_start, C_end) if t_now < t_start then
foo = C_start; elseif t_now > t_end then
foo = C_end;
else
foo = C_start + (C_end - C_start) * (t_now - t_start ) / (t_end - t_start);
end endfunction
// define the state matrix function
term1 = Mc*rw^2 + J;// Precalculate these terms to save time term2 = R*term1;
Xd = 10;// the setpoint 10 turns == 160 pulses
Cd = ppr * Xd / (2 * PI * rw) ;
function foo=derivative(state,t, h) Vs=control(motion(0, 6, t($, 1), 0, Cd));
//Vs=control(Cd);
term3 = cos(state($,3));// precalculate some repeated terms to save time term4 = sin(state($,3));
term5 = term1 + Mp * (term4 * rw)^2;
//printf("%f %f \n", Cd, Vs);
v_dot = -state($,2)*(K^2) / (term5 * R) ...// d/dt v
+term3*term4*Mp*g*rw^2 / term5 ...
+state($,4)^2 * Mp*l*term4*rw^2 / term5 ...
+Vs*K*rw / term5;
foo = [ state($,2), ...// d/dt x = v
v_dot, ...
state($, 4), ...// d/dt theta
-g * term4 / l - state($, 2) * term3 / l ...// d/dt omega ];
endfunction
// Integration Set the time length and step size for the integration steps = 5000;// The number of steps to use
t_start = 0;// the start time - normally use zero t_end = 10;// the end time
h = (t_end - t_start) / steps;// the step size t = [t_start];// an array to store time values for i=1:steps,
t = [t ; t($,:) + h];
X = [X ; X($,:) + h * derivative(X($,:), t($,:), h)];// first order
end
Figure 32.8 A Scilab program to simulate the swaying mass on the crane
writing guide - 32.17
// Graph the values for part e)
plot2d(t, [X(:,1) + l*sin(X(:,3))], [-2], leg="mass position"); //plot2d(t, [X(:,1), 10*X(:, 3)], [-2, -5], leg="position@theta (X 10)"); xtitle('Time (s)');
// printf the values over time intervals = 20;
for time_count=1:intervals,
i = int((time_count - 1)/intervals * steps + 1); xmass = X(i,1) + l*sin(X(i,3));
printf("Mass location at t=%f x=%f \n", i * h, xmass);
// printf("Point at t=%f x=%f, v=%f, theta=%f, omega=%f \n", i * h, X(i, 1), X(i, 2), X(i, 3), X(i, 4));
end
// find the settling time in the results array ts = 0;
for i = 1:steps,
xmass = X(i,1) + l*sin(X(i,3));
if xmass > (Cd + tolerance) then ts = i*h + t_start; end
if xmass < (Cd - tolerance) then ts = i*h + t_start; end
end
printf("\nTheoretical settling time %f \n", ts);
Figure 32.9 A Scilab program to simulate the swaying mass on the crane