


Рис. 13.2
Висячий линейно-угловой ход С-е-k-m (рис. 13.1) опирается на исходный
пункт С с известными координатами и для него определяется исходный дирекционный угол αсе только в начале хода.
Свободный линейно-угловой ход не имеет исходных пунктов и исходных дирекционных углов ни в начале, ни в конце хода.
По точности измерения горизонтальных углов и расстояний линейноугловые ходы делятся на две большие группы: теодолитные ходы и полигоно-
метрические ходы.
В теодолитных ходах горизонтальные углы измеряют с погрешностью не более 30"; относительная погрешность измерения расстояний mS/S колеблется от
1/1000 до 1/3000.
В полигонометрических ходах горизонтальные углы измеряют с погрешностью от 0,4" до 10", а относительная погрешность измерения расстояний mS/S бы-
вает от 1/5000 до 1/300 000.
По точности измерений полигонометрические ходы делятся на два разряда и 4 класса, рассмотренные ранее.
13.2. Привязка линейно-угловых ходов
Под привязкой разомкнутого линейно-углового хода понимают совмещение начальной и конечной его точек с исходными пунктами геодезической сети, координаты которых известны. На исходных пунктах измеряют углы между направлением с известным дирекционным углом ( αнач и αконеч) и первой (последней) стороной хода; эти углы называются примычными.
Кроме этих стандартных ситуаций встречаются случаи, когда линейно-угловой ход начинается или заканчивается на пункте с неизвестными координа-
тами. В таких случаях возникает дополнительно задача определения координат этого пункта. Самый простой способ определения координат одного пункта – геодезические засечки; если вблизи определяемого пункта есть несколько известных пунктов, то, выполнив k угловых и (или) линейных измерений (k >2), можно вычислить искомые координаты по стандар тным алгоритмам. Если такой возможности нет, то возникают особые случаи привязки; расс мотрим некоторые из них.
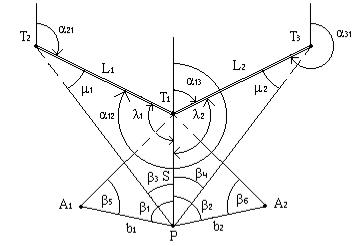
Снесение координат с вершины знака на землю. На рис. 13.3 пункт P – опре-
деляемый, а пункты Т1, T2, T3 – исходные с известными координатами. Три исходных пункта можно использовать лишь в качестве визирных целей. С пункта P измеряют два угла по программе обратной угловой засечки, но трпх пунктов и двух углов недостаточно для полного контроля решения задачи. Кроме того, при малом рас стоянии между пунктами P и T1, угол засечки будет чрезмерно малым и точность засечки невысокой. Для обеспечения надежности задачи закладывают два временных пункта A1 и A2 и измеряют расстояния b1, b2 и углы β1, β2, β3, β4,. β5, β6.
Рис. 13.3. Схема снесения координат точки на землю
Таким образом, общее число измерений равно 8, а количество неизвестных – 6 (координаты трех пунктов). Обработку этого геодезического построения необходимо выполнить уравниванием по методу наименьших квадратов (МНК), но приближенное, достаточно точное решение можно получить по конечным формулам, приведенным далее. Производятся следующие расчеты:
∙ вычисление расстояния s (s = T1P) два раза: из треугольников PA1T1 и PA2T2 и затем среднего из двух:

S = 0,5 [(b1sinβ5) / sin(β1 + β5)] + [(b2sinβ6) / sin(β2 + β6)] . (13.1) 
∙ решение обратной геодезической задачи между пунктами T1 и T2 (вычисление
α12, L1)
и T1 и T3 (вычисление α13 и L2); (решение известно и здесь не приводится) ∙ вычисление углов µ1 и µ2 из треугольников PT2T1 и PT3T1:
sin µ1 = (s/L1) sin β3; |
sin µ2 = (s/L2) sin β4; |
(13.2) |
∙ вычисление углов λ1 и λ2 из треугольников PT2T1 и PT3T1:
λ1 = 180° ‒ (µ1 + β3); |
λ2 = 180° ‒ (µ2 + β4); |
(13.3) |
∙ вычисление дирекционного угла линии T1P:
α = 0,5 [(α12 – А1) + (α13 + А2)]; |
(13.4) |
∙ решение прямой геодезической задачи из пункта T на пункт P:
ХР = ХА + S соs α;
YР = YА + S sin α.
13.3. Привязка линейно-углового хода к стенным маркам
Стенные марки закладываются в цокольный этаж или в стену капитального здания; конструкции их бывают различными и показаны в соответствующих разделах учебной и технической литературы. Закладка стенных марок и определение их координат выполняется при создании геодезических сетей на территории населенных мест и промыш ленных предприятий; в дальнейшем эти марки играют роль опорных пунктов в последующих геодезических построениях.
Схема привязки пункта Р хода к двум маркам A и B показана на рис.13.4, а. На линии AB с помощью рулетки измеряется отрезки АР, РВ и АВ = S, затем координаты точки P находятся из решения прямой геодезической задачи с использова-

нием α - дирекционного угла направления AB.
а |
б |
Рис. 13.4. Привязка пунктов линейно-углового хода к стенным маркам
Схема привязки пункта Р хода к трем маркам A, B, C показана на рис.13.4, б. С помощью рулетки измеряются расстояния S1, S2, S3 и решается многократная линейная засечка по формулам, приведенным в технической и учебной литературе.
В качестве примычного направления с известным дирекционным углом можно использовать либо направление на одну из стенных марок, либо направление на какой-либо другой пункт с известными координатами.
Кроме метода засечек при привязке ходов к стенным маркам применяют также полярный метод и метод редуцирования, также рассмотренные в технической и учебной литературе.
13.4. Понятие о системе линейно-угловых ходов
Совокупность линейно-угловых ходов, имеющих общие точки, называют системой ходов; узловой точкой называется точка, в которой сходятся не менее трех ходов. Как и для отдельного линейно - углового хода, для системы ходов применяют строгую и упрощенную обработку измерений; упрощенную обработку рассмотрим на примере системы из трех линейно-угловых ходов с одной узловой точкой (рис. 13.5). Каждый ход опирается на исходный пункт с известными коодинатами; на каждом исходном пункте имеется направление с известным дирекционным углом.
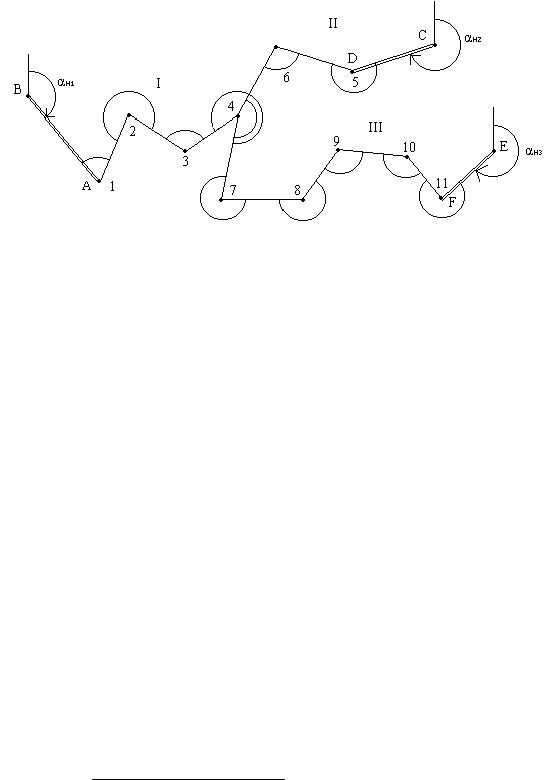
Рис. 13.5
Одну сторону какого-либо хода, проходящую через узловую точку, принимают за узловое направление (например, сторону 4 - 7) и вычисляют ее дирекционный угол по каждому ходу в отдельности, начиная от начального дирекционного угла в ходе. В случае измерения левых по ходу углов β получают три значения дирекционного угла узлового направления α4-7:
из первого хода |
α1 = αн1 + ∑β1 |
‒180° n1; |
из второго хода, |
α2 = αн2 + ∑β2 ‒180° n2; |
|
из третьего хода |
α3 = αн3 + ∑β3 |
‒180° n3, |
и вычисляют средневесовое значение из трех, причем за математический вес отдельного значения принимают число 1 / ni, где ni - количество углов в ходе от исходного направления до узлового направления (на рис. 13.5 n1 = 4, n2 = 3, n3 = 5):
|
α1 / n1 + α2 / n2 + α3 / n3 |
|
αузл = |
. |
(13.5) |
|
1 / n1 + 1 / n2 + 1 / n3 |
|
Считая узловое направление исходным и зная его дирекционный угол, вычисляют угловые невязки в каждом ходе по отдельности и вводят поправки в из-