

4. Схема врчв на основе расчетного однорежимного рчв
4.1 Оценка количества пружин для врчв
В регуляторе с постоянной предварительной затяжкой пружины перемещение муфты из одного крайнего положения в другое охватывает весь диапазон скоростных режимов двигателя. Регуляторные характеристики образуются при частичном перемещении муфты.
Исходя из принятых конструктивных размеров, оцениваем полный ход муфты для всех режимов регулирования
На номинальном режиме находим Emax и Emin, наносим их на график (рисунок 4.1) и соединяем прямой.
Задавшись
минимальным скоростным режимом работы
 ,
определяем минимальную угловую скорость
вращения вала регулятора:
,
определяем минимальную угловую скорость
вращения вала регулятора:

Задаемся степенью неравномерности δ1=20% и определяем ωх.х.1:

Далее находим значение Emin1 и Emax для данного режима:


По найденным значениям строим линию Е1min - Е1max.
Продлеваем линии Е1min - Е1max , Еmin - Еmax до их пересечения в точке О. Отложив в обе стороны от точки пересечения zм , находим :
Еmax2=990 H,
Еmin2=300 Н.
По величине E2max и E2min определяем :

Тогда степень неравномерности регулятора:

Так
как
 ,
то необходимо устанавливать две пружины.
,
то необходимо устанавливать две пружины.
Жесткость первой пружины равна:

Жесткость второй пружины равнва:

Рисунок 4.1.-Диаграмма E-Z для регулятора с постоянной затяжкой пружин.
4.2 Конструктивная схема врчв, алгоритм функционирования, алгоритм управления
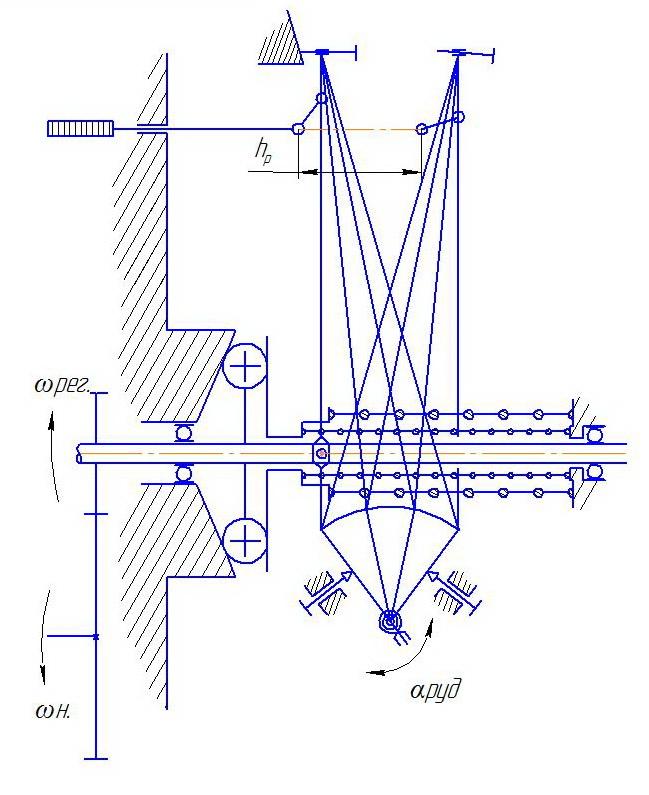
Рисунок 4.2.-Конструктивная схема ВРЧВ с постоянной предварительной затяжкой пружин.
Алгоритм функционирования ВРЧВ – ВРЧВ обеспечивает задание требуемой частоты вращения и поддерживает заданную частоту вращения при изменении нагрузки на двигатель.
Алгоритм управления:
- управление или желаемое изменение скоростных режимов – изменение в пространстве подвижной опоры(кронштейна) переводного рычага.
- управление по отклонению управляемого параметра или регулирование – при отклонении управляемого параметра ωдв от заданного значения необходимо обеспечить силовое воздействие на регулирующий орган с целью изменения управляющего фактора (цикловой подачи) по заданному закону


 ,
,
что обеспечивает отрицательную обратную связь в регуляторе.
Список используемой литературы
1. Автоматическое регулирование и управление двигателем внутреннего сгорания: методическое пособие к лабораторным работам для студентов специальности 1-37 01 01 «Двигатели внутреннего сгорания» / Г.А. Вершина, М.П. Ивандиков, E.С. Тамкович. - Минск: БНТУ, 2008. - 84 с.
2. ГОСТ 3722-81. Подшипники качения. Шарики. Технические условия.
3. ГОСТ 17305-91. Проволока из углеродистой конструкционной стали. Технические условия.
4. ГОСТ 10511-83. Системы автоматического регулирования частоты вращения (САРЧ) судовых, тепловозных и промышленных дизелей. Общие технические требования.
4. Крутов В.И. «Автоматическое регулирование и управление двигателей внутреннего сгорания» - М.: Машиностроение, 1989. – 416 с.: ил.