

3. Математическая модель электромеханической системы подчиненнго управления с упругой механической связью
На
рис. 3 показана принципиальная схема
исследуемой электромеханической
системы, в которой приняты следующие
обозначения: ТГ – тахогенератор (![]() –
напряжение ТГ,
–
напряжение ТГ,![]() –
согласующее сопротивление для сигнала
обратной связи по скорости); ЭД –
электродвигатель (
–
согласующее сопротивление для сигнала
обратной связи по скорости); ЭД –
электродвигатель (![]() – частота вращения ЭД,
– частота вращения ЭД,
![]() –
ток якоря ЭД); Р – редуктор; ТП –
тиристорный преобразователь; ДТ –
датчик тока (
–
ток якоря ЭД); Р – редуктор; ТП –
тиристорный преобразователь; ДТ –
датчик тока ( ![]() ,
,![]() – аналогично ТГ); БТО – блок
токоограничения;
– аналогично ТГ); БТО – блок
токоограничения;![]() –
напряжение задания; РС – регулятор
скорости ( zрс
–
операторное сопротивление в цепи ОС
регулятора скорости,
–
напряжение задания; РС – регулятор
скорости ( zрс
–
операторное сопротивление в цепи ОС
регулятора скорости,
![]() –
согласующее сопротивление для входного
напряжения,
–
согласующее сопротивление для входного
напряжения,![]() –
напряжение на выходе РС); РТ – регулятор
тока ( zрт,
–
напряжение на выходе РС); РТ – регулятор
тока ( zрт,
![]() ,
,![]() – аналогично РС); СУ – система управления,
формирующая управляющие сигналы для
ТП;
– аналогично РС); СУ – система управления,
формирующая управляющие сигналы для
ТП;
![]() – жесткость механической связи между
ЭД и исполнительным механизмом.
– жесткость механической связи между
ЭД и исполнительным механизмом.
Классический анализ систем подчиненного управления предполагает расчет по одномассовой структурной схеме, характеристики которой хорошо изучены и подробно описаны, например, в [4, 5, 9]. Широкое развитие в теории автоматического управления получили методы анализа и синтеза динамических структур ЭП, основанные на использовании исходного математического описания в виде нормированной структурной схемы [5]. Наглядный и универсальный характер подобного описания облегчает исследование динамических свойств графическими, частотными методами и путем моделирования на ЭВМ.
Расчетная структурная схема в абсолютных
единицах, соответствующая исследуемой
ЭМС (рис. 3), и НСС для одномассовой системы
показана на рис. 4. Аналогичные схемы
для двухмассовой ЭМС, учитывающие
упругость механической части
электропривода, показаны на рис. 5.
Приняты следующие обозначения:
![]() ,
,![]() – соответственно, постоянные времени
датчика тока и тахогенератора;
– соответственно, постоянные времени
датчика тока и тахогенератора;![]() – постоянная времени тиристорного
преобразователя;
– постоянная времени тиристорного
преобразователя;![]() ,
,![]() ,
,![]() ,
,![]() – коэффициенты передачи и нормированные
постоянные времени для регуляторов
тока и скорости;
– коэффициенты передачи и нормированные
постоянные времени для регуляторов
тока и скорости;![]() ,
,![]() – передаточные функции регуляторов
контуров скорости и тока;
– передаточные функции регуляторов
контуров скорости и тока;![]() ,
Tя – нормированное значение
сопротивления и постоянная времени
цепи якоря;
,
Tя – нормированное значение
сопротивления и постоянная времени
цепи якоря;![]() ,
В*с – коэффициент, определяющий
взаимосвязь между ЭДС двигателя и его
частотой вращения при постоянном
магнитном потоке, вычисляется по
паспортным данным электродвигателя.
,
В*с – коэффициент, определяющий
взаимосвязь между ЭДС двигателя и его
частотой вращения при постоянном
магнитном потоке, вычисляется по
паспортным данным электродвигателя.
Суммарный момент инерции определяется
как сумма момента инерции электродвигателя
![]() и момента инерции исполнительного
механизма
и момента инерции исполнительного
механизма![]() ,
приведенного к валу ЭД. Нормированное
значение сопротивления цепи якоря
,
приведенного к валу ЭД. Нормированное
значение сопротивления цепи якоря![]() определяется по формуле [5]:
определяется по формуле [5]:
![]() .
(10)
.
(10)
Суммарная механическая постоянная
времени
![]() ,
с, определяется как сумма механических
постоянных времени первой
,
с, определяется как сумма механических
постоянных времени первой![]() и второй
и второй![]() масс соответственно.
масс соответственно.![]() – постоянная времени жесткости;
– постоянная времени жесткости;![]() ,
,![]() ,
,![]() – соответственно: коэффициенты
внешнего трения на первой массе, второй
массе и внутреннего трения в передаче.
– соответственно: коэффициенты
внешнего трения на первой массе, второй
массе и внутреннего трения в передаче.
Формулы для определения указанных параметров:
![]() ;
;![]() ; (11)
; (11)
![]() ; (12)
; (12)
![]() ;
;![]() ; (13)
; (13)
![]() , (14)
, (14)
где J1, J2– приведенные моменты инерции первой и второй масс;
н, Mн– номинальные частота вращения и момент ЭД;
a1, a2– размерные коэффициенты связи между моментами внешнего трения Mfi и скоростями вращения массi;
вт– коэффициент внутреннего демпфирования.
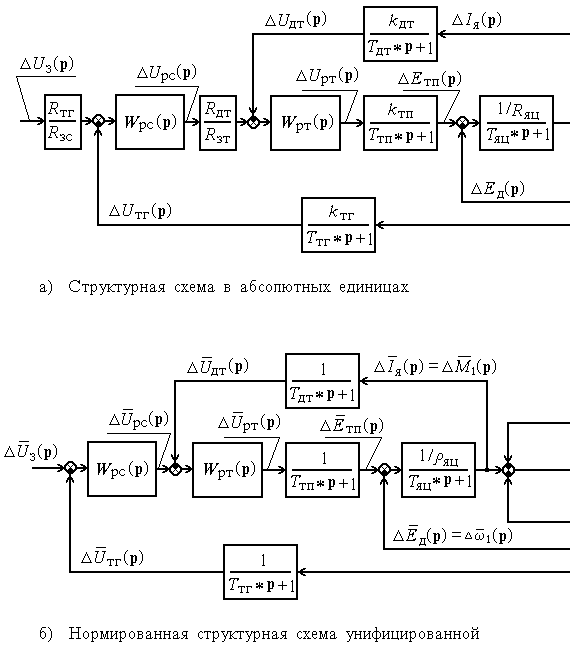
Рис. 5. Структурные схемы упругой двухмассовой
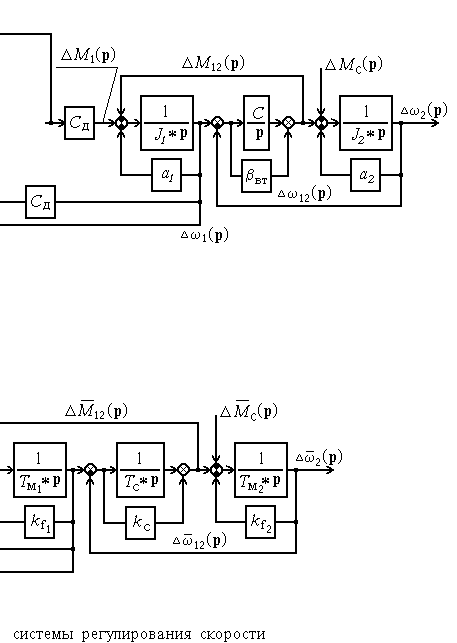
системы подчиненного управления.
![]() , (15)
, (15)
где вт– логарифмический декремент затухания колебаний; согласно [8], принимает значения от 0.1 до 0.3;
12– собственная частота колебаний двухмассовой ЭМС.