

I. Краткие пояснения
Многотактной системой управления называют систему, в которой выходной сигнал управления в любой момент времени определяется входными сигналами в данный момент и выходными сигналами в предыдущие моменты. Многотактная система управления должна содержать элементы памяти, запоминающие предыдущие значения выходных сигналов. Поэтому она может быть реализована устройством, которое называют автоматом с элементами памяти (т.е. если у комбинационного (однотактного) автомата соединить часть выходов с частью его входов через элементы памяти, то получится многотактная система) или последовательными устройством (автоматом). Сигналы с элементов памяти называют промежуточными.
Простейшими примерами многотактных систем являются триггеры, счетчики, регистры. Промышленность производит микросхемы, реализующие как простые так и сложные многотактные схемы. Простейщие многотактные устройства (триггеры) в свою очередь могут быть составлены, например, из элементов «И-НЕ».
В качестве примера рассмотрим синтез многотактной системы управления аварийной сигнализацией.
Эта схема должна обеспечить зажигание лампы при превышении предельно допустимой температуры одновременно в двух точках объекта. Выключение лампы должно происходить только при уменьшении температуры до нормальной так же одновременно в двух точках объекта. Сигналы о превышении температуры вырабатываются при помощи двух датчиков.
Синтез многотактных систем управления даже в простейших случаях достаточно сложен, обычно он осуществляется интуитивно, либо при помощи циклограмм. Процедура синтеза облегчается при . применении положений алгебры логики, теории автоматов и теории алгоритмов. В данной работе, для решения задач синтеза многотакных систем управления предлагается оригинальный подход, связанный с составлением дискретной динамической модели (ДДМ) процесса и использованием булевой функции "переход", которая может быть раскрыта (реализована) асинхронным последовательностным автоматом.
Синтез многотактных систем управления осуществляется в несколько этапов:
Построение графа состояний и или формирование ДДМ процесса.
Формирование булевой функции "переход" на основании ДДМ процесса.
Преобразование минимизация и приведение булевой функции "переход" к виду удобному для реализации.
Реализация логической функции в заданном базисе элементов.
Рассмотрим эти этапы в соответствии с решением задачи предложенного примера.
1.1. Построение графа состояний и или формирование
ДДМ процесса
Обозначим входные сигналы от датчиков температуры Х1 и Х2, а выходной сигнал У. Состояния системы определяется совокупностью состояний входных и выходных сигналов. Каждое состояние системы на графе (рис. 1) изображается вершиной в виде кружка, в верхней половине которого проставляются значения входных сигналов, а в нижней - выходных. Исходное нулевое состояние определяет вершина 1. Взаимный переход из вершин в вершину обозначается связями в виде линий без стрелок - ребрами. Однонаправленный переход между вершинами обозначается линиями со стрелками - дугами. Например, переходы из вершины 2 и 3 в вершину 4 могут быть только однонаправленными, так как при уменьшении температуры до нормальной только в одной точке лампа не должна выключаться.
Дискретная динамическая модель процесса- (ДДМ) может быть непосредственно получена из графа и представляет собой аналитическое выражение. В ДДМ входят конъюнкции входных сигналов (с инверсиями или без них в зависимости от того, какое значение
принимает входной сигнал в этом состоянии - 0 или 1), а так же
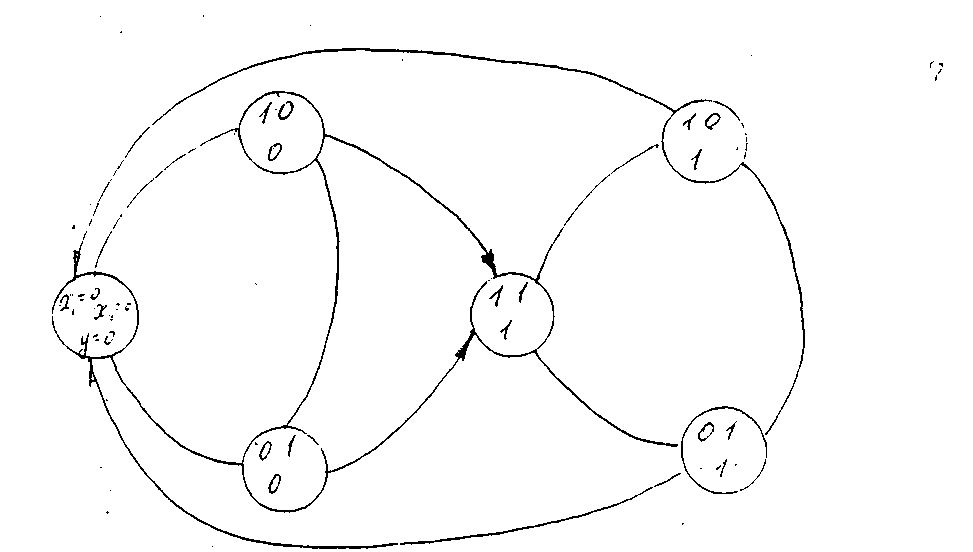
Рис. I. Граф состояний многотактной системы управления
аварийной сигнализацией
стрелки переходов либо линии связей, если переход между вершинами взаимный. Однако, как это часто бывает, строить всю ДДМ нет необходимости, нужно построить только ту её часть. в которой выходные сигналы равные единице.
Тогда интересующие нас ДДМ процесса, будет иметь вид:
Х1Х2 + Х1Х2 (Х1Х2 + Х1Х2)
Приписанные к ДДМ У означают, что сигнальная лампа включена в случае, когда сигналы поступают на первой и второй датчики температуры (это выражается конъюнкцией Х1Х2)
или тогда, когда осуществляется переход из состояния Х1Х2 в состояние X1X2 или в состояние Х1Х2 Очевидно, что при достаточном навыке ДДМ процесса может быть получена непосредственно, т.е. минуя этап построения графа процесса.