

2.20. Организация шинного интерфейса в максимальном режиме
Максимальный режим применяется в следующих трех случаях:
МП стоит в сложной однопроцессорной системе;
МП стоит в многопроцессорной системе и является ведущим, а остальные процессоры (например, арифметический сопроцессор ВМ87) – ведомыми. Это, так называемая, сильно связанная конфигурация.
МП стоит в многопроцессорной системе, в которой несколько равноправных процессоров разделяют между собой системную шину. Это, так называемая, слабо связанная конфигурация.
Организация шины данных и шины адреса в максимальном режиме ничем не отличается от их организации в минимальном режиме, а вот организация шины управления имеет существенные отличия. Дело в том, что в максимальном режиме ВМ86 не вырабатывает некоторые необходимые в системе управляющие сигналы. Задача выработки этих сигналов возлагается на специальную микросхему системного контроллера К1810ВГ88 (i8288). Данная микросхема приведена на рис. 33. Далее рассмотрим назначение входов-выходов этой микросхемы.
На входы S2-S0 подаются сигналы состояния с одноименных выходов ВМ86. Эти сигналы характеризуют текущий цикл шины (см. табл.2) и именно по ним контроллер определяет какие управляющие сигналы он должен в данный момент вырабатывать.
На вход CLK подается синхросерия с одноименного выхода генератора ГФ84. По этой синхросерии контроллер определяет момент выдачи управляющих сигналов.
На выходе MRDC (memory read command) контроллер формирует системный управляющий сигнал «чтение из памяти» (MR), а на выходе MWTC (memory write command) – системный управляющий сигнал «запись в память» (MW).
На выходе AMWTC (advanced memory write command) формируется опережающий сигнал «запись в память». Он вырабатывается на один такт ранее сигнала MW и его можно использовать для подготовки к записи медленнодействующих микросхем памяти.
На выходе IORC (input-output read command) контроллер формирует системный управляющий сигнал «чтение из порта ВУ» (IOR), а на выходе IOWC (input-output write command) – системный управляющий сигнал «запись в порт ВУ» (IOW).
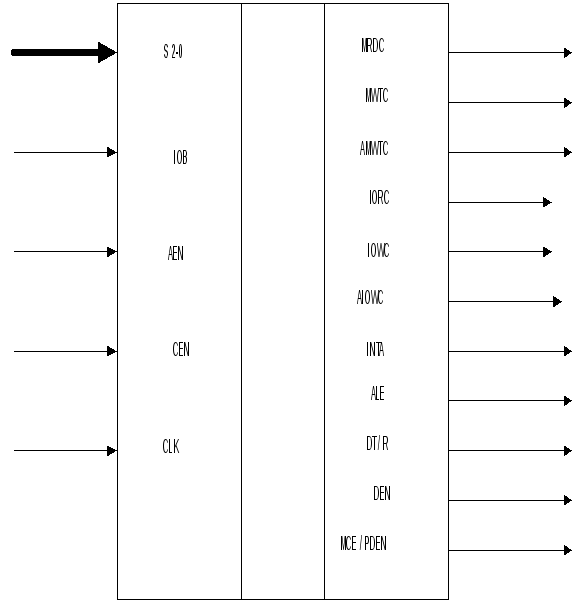
Рис. 33
На выходе AIOWC (advanced input-output write command) контроллер формирует опережающий сигнал «запись в порт ВУ». Он вырабатывается на такт ранее IOW и его можно использовать для подготовки ВУ к записи.
Сигнал на выходе ALE (см. одноименный выход ВМ86) определяет момент записи адреса в регистры-защелки ИР82.
Сигнал на выходе DT/R (см. одноименный выход ВМ86) задает направление передачи информации через шинные формирователи ВА86.
Сигнал, снимаемый с выхода DEN (см. одноименный выход ВМ86), подключает шинные формирователи ВА86 к шине данных. Активный уровень сигнала на этом выходе контроллера противоположен активному уровню сигнала на выходе DEN ВМ86, поэтому перед подачей на шинные формирователи сигнал, снимаемый с выхода DEN ВГ88, надо проинвертировать.
INTA – выход подтверждения прерывания (см. одноименный выход ВМ86).
AEN, CEN (command enable – «команда разрешена») и IOB (input-output bus – «резидентная шина ввода-вывода») - управляющие входы контроллера. Если на входе AEN стоит активный нулевой сигнал, контроллер вырабатывает выходные сигналы, если пассивный (единица) – не вырабатывает. Вход CEN действует аналогично входу AEN, только активный сигнал на CEN имеет уровень «единица». Иначе говоря, чтобы ВГ88 вырабатывал выходные сигналы, надо обеспечить AEN=0 и CEN=1. Исключением является случай, когда на вход IOB подана единица. В последнем случае ВГ88 формирует сигналы на выходах IORC, IOWC, AIOWC и PDEN вне зависимости от уровней сигналов на входах AEN И CEN.
Комбинация сигналов на входах AEN, CEN и IOB задает контроллеру конфигурацию системы, в которой работает «его» процессор. В частности, жестко заданная комбинация AEN = IOB = 0, CEN = 1 означает что ВГ88 всегда вырабатывает выходные сигналы. Значит МП стоит в однопроцессорной системе и не разделяет СШ с другими процессорами.
Сигнал на выходе MCE/PDEN (master cascade enable/periphery data enable) трактуется в зависимости от уровня сигнала на входе IOB. Если на IOB подан ноль, сигнал на выходе MCE/PDEN рассматривается как сигнал MCE. Этот сигнал используется если в системе имеет место каскадное подключение контроллеров прерываний ВН59. Если IOB=0, сигнал на выходе MCE/PDEN рассматривается как сигнал PDEN. Назначение сигнала PDEN рассматривается ниже.