

Крайние положения механизмов.
Механизм находится в крайнем положении, когда первое и второе звенья находятся на одной линии. Для первого механизма это происходит при q1=87° и при q2=257°, для второго при q1=65° и при q2=336°.
Крайние положения механизма 1 (см. приложение3.1)
Крайние положения механизма 2 (см. приложение3.2)
1.4.3. Особые положения механизма. Сборки.
Групповые уравнения для структурной группы имеют два решения, каждое из которых соответствует одной из ее сборок. Механизм может перейти из одной сборки в другую при прохождении особого положения, которое можно определить с помощью матрицы Якоби.
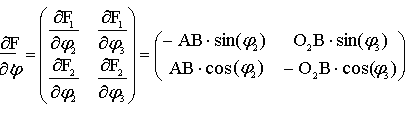
Составим матрицу Якоби для группы ВВВ:
![]() ;
;
![]() ;
;
Механизм находится в особом положении, когда определитель матрицы Якоби равняется нулю:
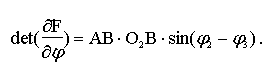
Для группы ВВВ определитель матрицы Якоби не обращается в ноль и имеет постоянный, отрицательный знак. Это значит, что данная структурная группа при любом значении угла поворота кривошипа находится в сборке M=-1.
Для структурной группы ВВП определитель матрицы Якоби отрицателен, следовательно, она находится в сборке М=-1.
Особые положения механизма 1 (см. приложение 4.1)
Особые положения механизма 2 (см. приложение 4.2)
Кинематический анализ.
1.5.1. План скоростей и ускорений для двух положений механизма.
Механизм 1:
1. Для четвёртого положения механизма (см. приложение 5.1).
2. Для одного из крайних положений механизма (см. приложение 6.1).
Механизм 2:
1. Для седьмого положения механизма (см. приложение 5.2).
2. Для одного из крайних положений механизма (см. приложение 6.2).
1.5.2. Аналитическое определение аналогов скоростей и ускорений.
Чтобы найти аналог скорости точки A достаточно продифференцировать выражение для ее координат по q (ниже изложенная система верна для обоих механизмов):
![]() ;
;
![]() .
.
Механизм 1:
Для нахождения аналогов угловых скоростей 2 и 3 звена продифференцируем соответствующие групповые уравнения по q:
![]() ;
;
![]() .
.
Из получившейся системы находим угловые скорости 2 и 3 звена (решение приведено в приложении Mathcad).
Механизм 2:

Из получившейся системы находим угловую скорость звена 2 и относительную скорость точек второго звена (решение приведено в приложении Mathcad).
Для нахождения аналогов угловой скорости звена 4 и линейной скорости ползуна 5, продифференцируем групповые уравнения, составленные для структурной группы ВВП(ниже изложенная система верна для обоих механизмов):
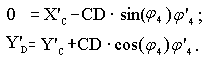
Из получившейся системы находим угловую скорость звена 4 и линейную скорость ползуна (решение приведено в приложении Mathcad).
Для нахождения аналога ускорения точки A продифференцируем по q выражения для проекций аналога ее скорости (система верна для двух механизмов):
![]() ;
;
![]() .
.
Механизм 1:
Для нахождения аналогов угловых ускорений 2 и 3 звена продифференцируем дважды соответствующие групповые уравнения по q:
![]()
![]() .
.
Из получившейся системы находим угловые ускорения звена 2 и 3 (решение приведено в приложении Mathcad).
Механизм 2:

Из получившейся системы находим угловое ускорение звена 2 и относительное ускорение точек второго звена (решение приведено в приложении Mathcad).
Для нахождения аналогов углового ускорения звена 4 и линейного ускорения ползуна 5, продифференцируем дважды групповые уравнения, составленные для структурной группы ВВП (уравнения для двух механизмов идентичны):

Из получившейся системы находим угловое ускорение звена 4 и линейное ускорение ползуна (решение приведено в приложении Mathcad).