

Механика Прикладная механика лекции
.pdfSA 0,5zhd cp ,
где z число шлицов;
h высота поверхности контакта шлицов;
dср средний диаметр поверхности контакта;
изн допускаемое среднее давление из расчета на износ.
Для прямобочных шлицевых соединений средний диаметр поверхности контакта и высоту поверхности контакта рассчитывают по следующим зависимостям:
d |
|
|
D d |
; |
h |
D d |
2 f , |
ср |
|
|
|||||
|
2 |
|
2 |
|
|||
|
|
|
|
||||
где D наружный диаметр шлицевого вала; d внутренний диаметр шлицевого вала; f размер фаски.
Для эвольвентных шлицевых соединений эти размеры приближенно определяют по следующим зависимостям:
dср D 1,1m; |
h 0,8m, |
где m модуль.
Профильные соединения. Профильным называется разъемное соединение, у которого ступица насаживается на фасонную поверхность вала (рис. 15.3 и 15.4,в), благодаря которой осуществляется передача вращательного движения.
Более совершенными являются профильные соединения с овальным контуром поперечного сечения (рис. 15.3, а). Данный профиль обладает свойством равноосности, т.е. постоянством диаметрального размера.
Простейшим профильным соединением является соединение вала, имеющего на конце квадратное поперечное сечение (рис. 15.3,в). Сторону квадрата обычно равна 0,75 диаметра вала.
81
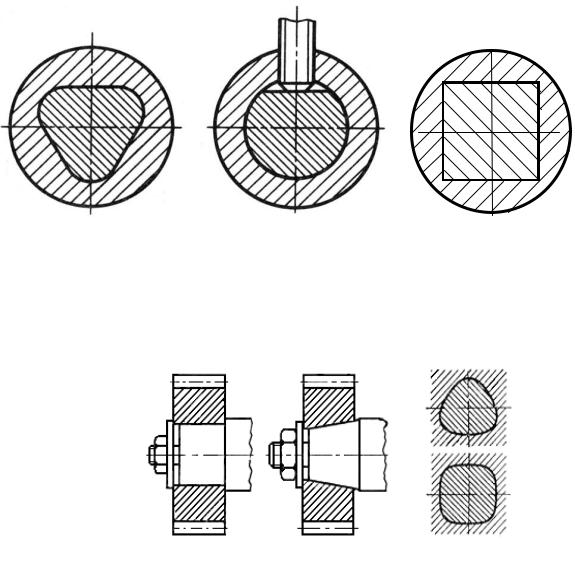
К профильному соединению относят также соединение на лыске
(рис. 15.3, б).
|
|
|
а |
б |
в |
Рис. 15.3
Профильные соединения в осевом направлении могут быть цилиндрическими (рис. 15.4,а) или коническими (рис. 15.4,б). Конические профильные соединения характеризуются удобством демонтажа, но по сравнению с цилиндрическими, они сложнее в изготовлении и дороже.
а |
б |
в |
|
Рис. 15.4 |
|
По сравнению со шпоночным соединением у профильных соединений лучшее центрирование сопрягаемых деталей, несколько меньшая концентрация напряжений и возможность точной обработки рабочих поверхностей с требуемой твердостью.
К основным недостаткам этих соединений можно отнести сложность и трудоемкость изготовления фасонных поверхностей, их относительно высокую стоимость и большие напряжения смятия.
При переменных и особенно реверсивных нагрузках применяют профильные соединения с натягом.
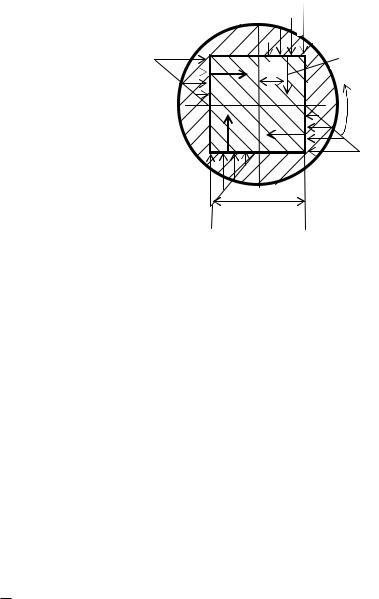
Расчет профильных соединений. Основным критерием работо-
способности профильного соединения является ограничение удельной нагрузки, которая вызывает смятие рабочих поверхностей.
82
 см
см
F
x
T
b
Рис. 15.5
Для профильного соединения, изображенного на рис. 15.5, при расчете на прочность предполагают, что зазор в соединении равен нулю.
Эпюра напряжений смятия при действии внешней нагрузки в поперечном сечении изменяется по треугольнику, а в продольном - постоянная вдоль оси.
Уравнение равновесия моментов всех сил и моментов относительно центра сечения имеет вид:
T 4Fx 0,
|
см |
b |
|
где F |
|
|
l равнодействующая сила от действующего напряжения |
2 |
2 |
||
смятия; |
|
|
|
x b3 плечо равнодействующей силы; l длина ступицы.
Учитывая значения F и x , условие прочности будет иметь вид:
|
|
|
3T |
|
|
. |
см |
|
см |
||||
|
|
b2l |
|
|||
|
|
|
|
|
||
|
|
|
|
|
|
16. Ременные передачи |
Общие сведения. Ременная передача – это передача гибкой связью (рис. 16.1), состоящая из ведущего 1 и ведомого 2 шкивов и надетого на них ремня 3. Основное назначение – передача механической энергии от двигателя передаточным и исполнительным механизмам, как правило, с понижением частоты вращения.
83
По принципу работы различаются передачи трением и зацеплением (зубчато-ременные). Передачи зубчатыми ремнями по своим свойствам существенно отличаются от передач трением и не рассматриваются в данном курсе.
Ремни передач трением по форме поперечного сечения разделяются: на плоские (рис. 16.2, а), клиновые (рис. 16.2, б), поликлиновые
(рис. 16.2, в) и круглые (рис. 16.2, г).
|
3 |
2 |
L |
|
|
|
|
|
2 |
1 |
K |
|
|
|
|
|
O2 |
|
2 |
|
|
|
|
|
d2 |
|
d1 |
O1 |
|
|
|
aw
Рис. 16.1
Условием работы ременных передач трением является наличие натяжения ремня, которое можно осуществить следующими способами: упругим предварительным растяжением ремня; перемещением одного из шкивов относительно другого; натяжным роликом; автоматическим устройством, обеспечивающим регулирование натяжения в зависимости от передаваемой нагрузки.
а |
б |
|
в |
|
|
||
|
|
Рис. 16.2 |
г |
|
|
|
Клиновые, поликлиновые, зубчатые и быстроходные плоские изготовляют бесконечными замкнутыми. Плоские ремни преимущественно выпускают конечными в виде длинных лент. Концы таких ремней склеивают, сшивают или соединяют металлическими скобами. Места соединения ремней вызывают динамические нагрузки, что ограничивает
84
скорость ремня. Разрушение этих ремней происходит, как правило, по месту соединения.
Плоские ремни (рис. 16.2,а) отличаются большой гибкостью из-за малого отношения толщины ремня к его ширине. Наиболее перспективны синтетические ремни ввиду их высокой прочности и долговечности. Несущий слой этих ремней выполняется из капроновых тканей, полиэфирных нитей. Материал фрикционного слоя – полиамид или каучук.
Клиновые ремни (рис. 16.2,б) имеют трапециевидное сечение с боковыми рабочими сторонами, соприкасающимися с канавками на шкивах. Благодаря клиновому действию ремни этого типа обладают повышенным сцеплением со шкивами. Клиновые ремни при том же натяжении обеспечивают примерно втрое большую силу трения по сравнению с плоскими ремнями. Из-за большой высоты сечения в клиновых ремнях возникают значительные напряжения при изгибе ремня на шкивах. Эти напряжения являются переменными и вызывают усталостное разрушение ремня. Клиновые ремни выпускаются семи марок в зависимости от площади сечения (О, А, Б, В, Г, Д и Е). Число ремней в комплекте обычно от 2 до 8 и ограничивается неравномерностью распределения передаваемой нагрузки между ремнями.
Поликлиновые ремни (рис. 16.2,в) – плоские бесконечные ремни с продольными клиновыми ребрами на внутренней поверхности. Эти ремни сочетают гибкость плоских ремней и повышенное сцепление со шкивами, характерное для клиновых ремней.
Круглые ремни (рис. 16.2,г) выполняют резиновыми диаметром от 3 до 12 мм, используются для передачи небольших мощностей в приборах и бытовой технике.
К достоинствам ременных передач трением можно отнести: возможность передачи движения на значительные расстояния; возможность работы с высокими скоростями; плавность и малошумность работы; предохранение механизмов от резких колебаний нагрузки и ударов; защита от перегрузки за счет проскальзывания ремня по шкиву; простота конструкции, отсутствие необходимости смазочной системы; малая стоимость.
Основными недостатками ременных передач являются: значительные габариты; значительные силы, действующие на валы и опоры; непостоянство передаточного отношения; малая долговечность ремней в быстроходных передачах; необходимость защиты ремня от попадания масла.
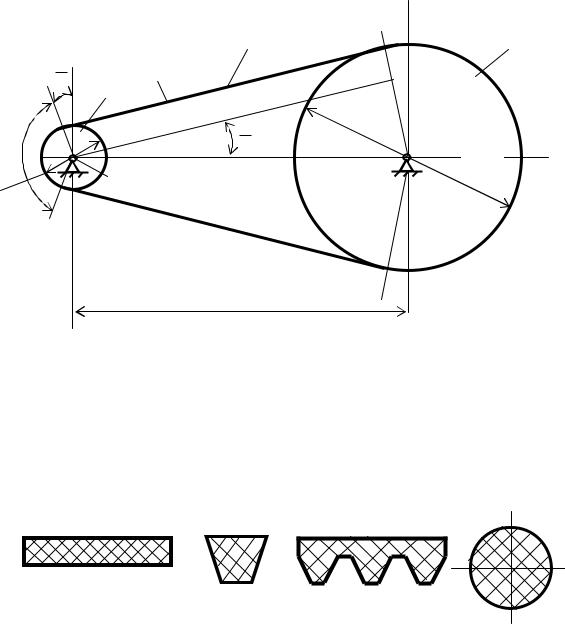
Основные геометрические соотношения. К геометрическим па-
раметрам ременной передаче относятся диаметры шкивов d1, d2 , межосевое расстояние aw , угол обхвата и длина ремня L .
85
Из рис. 16.1 следует, что угол обхвата равен
180 2 2 .
Проведем из центра O1 прямую, параллельную ветви ремня (рис. 16.1). Из треугольника O1O2 K следует
sin O2 K d2 d1 . 2 aw 2aw
Учитывая, что sin 2 2 , получаем выражения для определения угла обхвата
180 0 600 d2 d1 . aw
Минимальный угол охвата min должен быть для плоскоременной передачи – 1500, для клиноременной - 1200.
Длина ремня (без учета его деформации на шкивах) определяется как сумма длин прямолинейных участков и длин дуг охвата ремнем малого и большого шкивов.
L 2a |
|
cos |
|
d2 d1 d2 |
d1 . |
w |
|
||||
|
2 |
2 |
2 |
||
|
|
||||
Используя разложение в ряд Маклорена с точностью до первых двух
|
|
|
|
|
|
1 |
1 |
|
|
2 |
||
членов cos |
|
|
|
|
|
|
, получаем зависимость для определения длины |
|||||
|
|
|
|
|||||||||
|
|
|
|
2 |
|
|
2 |
|
|
2 |
||
ремня: |
|
|
|
|
|
|
|
|
|
|
||
L 2a |
w |
d2 d1 |
d2 d1 2 . |
|||||||||
|
|
|
|
2 |
|
|
|
|
4aw |
|||
|
|
|
|
|
|
|
|
|
||||
|
Кинематика ременных передач. Окружные скорости на шкивах |
|||||||||||
определяются по зависимостям: |
||||||||||||
V |
n1d1 |
|
|
; V |
|
n2d2 |
, |
|||||
|
|
|
|
|
|
|
||||||
1 |
60 1000 |
2 |
|
|
60 1000 |
|||||||
|
|
|
|
|
||||||||
86

где d1 и d2 – диаметры ведущего и ведомого шкивов, мм; n1 и n2 – частоты вращения шкивов, об/мин.
Окружная скорость V2 на ведомом шкиве, вследствие упругого скольжения, меньше скорости V1 на ведущем шкиве:
V2 V1 1 ,
где коэффициент упругого скольжения. Передаточное число:
u d2 . d1 1
Обычно коэффициент упругого скольжения находится в пределах 0,01…0,02 и растет с увеличением нагрузки.
Силы и силовые зависимости. Окружная сила на ведущем шкиве определяется по зависимости:
F |
2T |
|
P |
|
1 |
1 |
, |
||
|
|
|||
t |
d1 |
|
V1 |
|
|
|
|
где T1 – вращающий момент на ведущем шкиве; P1 – мощность на ведущем шкиве.
С другой стороны
Ft S1 S2 ,
где S1и S2 силы натяжения ведущей и ведомой ветвей ремня под нагрузкой.
Сумма натяжений ветвей при передаче полезной нагрузки не меняется по сравнению с начальной
S1 S2 2So ,
где So предварительное натяжение ремня.
Сила предварительного натяжения ремня So должна обеспечивать
передачу полезной нагрузки за счет сил трения между ремнем и шкивом. При этом натяжение должно сохраняться долгое время при удовлетворительной долговечности ремня. С ростом силы несущая способность ременной передачи возрастает, однако срок службы уменьшается.
87
dN dFтр
dFтр
S dS |
S |
d
О
Рис. 16.3
Решая совместно два последних уравнения, получим систему из двух уравнений:
S |
|
S |
|
|
Ft |
; |
|||
|
|
|
|
||||||
|
1 |
|
o |
|
2 |
|
|
||
|
|
|
|
|
|
|
Ft |
|
|
|
|
|
So |
|
|
|
|||
S |
2 |
|
|
|
. |
||||
2 |
|
||||||||
|
|
|
|
|
|
|
|
||
В данной системе имеем три неизвестные S1, S2 и So величины. Для определения этих неизвестных Эйлер установил зависимость меж-
ду S1 |
|
и S2 |
, рассматривая элементарный элемент на границе буксования |
|||||||||||||||
(рис. 16.3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Рассмотрим условие равновесия. |
|
|
||||||||||||||
M |
|
|
0; |
S dS |
d1 |
|
S |
d1 |
dF |
|
d1 |
|
0; |
|
|
|||
|
|
|
|
|
|
|
||||||||||||
|
O |
|
2 |
|
|
|
2 |
|
тр |
2 |
|
|
|
|
|
|||
Y 0; |
S dS sin |
|
d |
S sin |
d |
dN 0. |
||||||||||||
|
|
|
||||||||||||||||
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
||
|
|
Учитывая, что |
dF |
|
dNf , sin |
d |
|
d |
, пренебрегая величинами |
|||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
тр |
|
|
|
2 |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
второго порядка малости и решая совместно уравнения равновесия, получим
dSS fd .
88
Интегрируя данное дифференциальное уравнение
S1 |
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dS |
|
|
|
fd , |
|
получаем S |
S |
|
|
e f . |
|||||||||
|
|
|
|
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||
S 2 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, получаем систему из трех уравнений |
||||||||||||||||
S |
|
S |
|
|
|
Ft |
|
; |
|
|
|
|
|
|
|
|
||||
|
o |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
||
|
|
2 So |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
S |
|
t |
; |
|
|
|
|
|
|
|
|
|||||||||
2 |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
S |
|
S |
|
e f . |
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решая |
данную систему уравнений, получаем зависимости для оп- |
|||||||||||||||
ределения S1, S2 и So |
через окружную силу Ft . |
|||||||||||||||||||
S1 Ft |
|
|
e f |
|
; S2 Ft |
1 |
; So |
F e f 1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
t |
e f 1 . |
|||||||||
e f 1 |
|
e f 1 |
2 |
|
||||||||||||||||
|
|
|
|
При круговом |
движении ремня на каждый его элемент массой |
|||||||||||||||
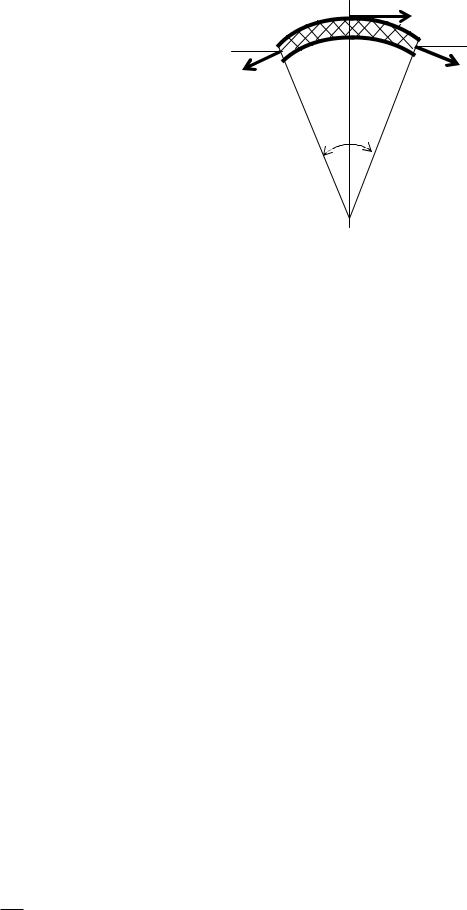
dm в пределах угла обхвата действуют элементарные центробежные силы dFин , которые вызывают дополнительное натяжение Sv ремня во всех его сечениях.
Элементарная центробежная сила (рис. 16.4) равна
|
V 2 |
|
|
d |
V 2 |
|
2 |
|
||
dFин dm |
|
|
|
d |
|
b |
|
b V |
|
d , |
d / 2 |
|
2 |
|
|
||||||
|
|
g |
d / 2 |
|
|
|
||||
где удельный вес материала ремня;плотность материала ремня;
b ширина ремня;толщина ремня.
89
dFин dm
Sv |
Sv |
d
О
Рис. 16.4
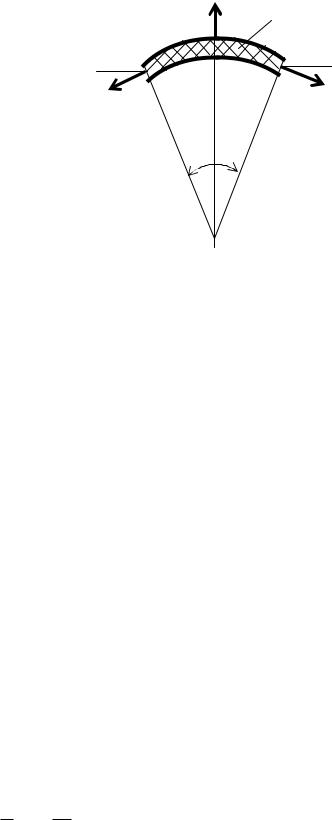
Условие равновесия элемента ремня на ось Y
dF |
|
2S |
|
sin |
d |
S |
|
d . Подставляя значение dF , имеем: |
|||||||||||
|
v |
|
v |
||||||||||||||||
|
|
ин |
|
|
|
|
|
|
|
2 |
|
|
|
|
ин |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
S |
v |
b V 2 . |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Напряжения в ремне. Так как S1 S2 , |
то наибольшие напря- |
|||||||||||||
жения будут действовать в ведущей ветви ремня. |
|
||||||||||||||||||
|
|
|
|
|
Напряжение от усилия S1 |
|
|||||||||||||
|
S1 |
|
|
So Ft / 2 |
. |
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||||||||
|
1 |
|
|
A |
|
|
|
|
A |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Напряжение от действия центробежных сил |
|
|||||||||||||
|
|
|
|
S |
v |
|
b V 2 |
V 2 . |
|
||||||||||
v |
|
A |
|
|
b |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В той части ремня, которая огибает шкив, возникают напряжения изгиба и , которые определяются по закону Гука
и1 E y E E.d1
Максимальное напряжение, которое возникает в ведущей ветви ремня, будет равно
max 1 v и1.
90