

§5. Построение обратной матрицы
Мы уже видели, что для того, чтобы матрица А была обратимой, необходимо и достаточно, чтобы она была квадратной и ее ранг r(A) должен быть равен порядку n матрицы А. Теперь, используя определитель матрицы, мы можем это утверждение сформулировать следующим образом. Для того чтобы квадратная матрица А имела обратную матрицу А-1, необходимо и достаточно, чтобы ее определитель D(A) . Элементы обратной матрицы А-1 определяются по формуле:

Здесь,
D(A)
– определитель матрицы А
= (аij),
где i
= 1,2,...,n,
j
= 1,2,...,n.
Аij
– алгебраические дополнения элемента
аij
матрицы А.
Заметим, что Аij
стоят не на месте элемента аij,
а на месте элемента аji.
Следовательно, матрица А-1
является транспонированной к матрице
![]() ,
элементы которойАij
стоят на месте элементов аij
алгебраическими дополнениями которых
они являются, тогда
,
элементы которойАij
стоят на месте элементов аij
алгебраическими дополнениями которых
они являются, тогда

Докажем, что построенная матрица А-1 является обратной к А. Для этого необходимо показать, что АА-1 = Е.
 .
.
Элементы
транспонированной матрицы
![]() Из теоремы о чужих дополнениях следует,
что еслиi
j,
то
Из теоремы о чужих дополнениях следует,
что еслиi
j,
то
![]()
Получили диагональную матрицу с равными элементами по главной диагонали, а это скалярная матрица, поэтому

Пример.
Найти матрицу, обратную для матрицы
 Покажем сначала, что данная матрица
имеет обратную.
Покажем сначала, что данная матрица
имеет обратную. Так как
Так как
D(A) , то данная матрица имеет обратную. Вычислим алгебраические дополнения:

![]()
Таким образом,

Осуществим проверку

Упражнения
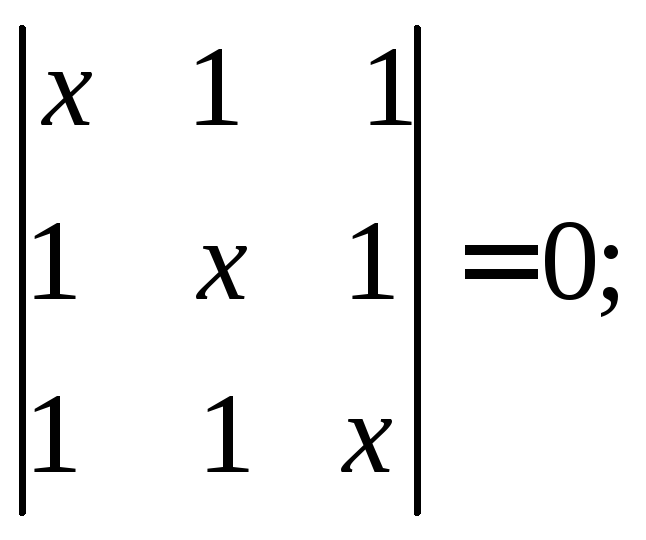
Решить уравнения

2. Лежат ли точки А(1,1,2), В(–2,1,2), С(3,0,2), Д(2,2,1) в одной плоскости.
3. Доказать, что прибавление к элементам какого-либо столбца опре-
делителя соответствующих элементов другого столбца этого же определителя, умноженных на одно и тоже число не равное нулю, величину определителя не изменяет.
4.
Образуют ли вектора
![]() базис векторного пространстваR3,
если да, то определить координаты вектора
базис векторного пространстваR3,
если да, то определить координаты вектора
![]() (1,2,3)
в этом базисе.
(1,2,3)
в этом базисе.
5.
Даны векторы:
![]() Найти их векторное произведение, угол
между ними и площадь параллелограмма,
построенного на этих векторах.
Найти их векторное произведение, угол
между ними и площадь параллелограмма,
построенного на этих векторах.
6.
Вычислить объем Vp
параллелепипеда, построенного на
векторах:
![]()
7.
Определить ранг матрицы

8.
Является ли матрица
 обратимой? Если, да, то определить
обратную ей матрицу.
обратимой? Если, да, то определить
обратную ей матрицу.
Глава 7 системы линейных уравнений
§1. Определения. Совместные и несовместные системы
Линейной системой к уравнений с n неизвестными х1, х2, . . . , хn, называется совокупность равенств
 а11х1
+ а12х2
+ . . . +а1nхn
= в1,
а11х1
+ а12х2
+ . . . +а1nхn
= в1,
а21х1 + а22х2 + . . . +а2nхn = в2, (7.1)
. . . . . . . . . . . . . . . . . . . . . . . .
ак1х1 + ак2х2 + . . . +акnхn = вк.
Коэффициенты аij и свободные члены вi, i = 1,2,..., к, j = 1,2,..., n – известны и принадлежат полю R действительных чисел или полю С комплексных чисел. В дальнейшем под этим полем мы будем понимать поле R действительных чисел.
Решить систему (7.1) означает определить упорядоченную совокупность чисел λ1, λ2, . . ., λn из R (или С) такую, что при замене х1,х2 ,. . . .,хn соответственно на λ1, λ2, . . ., λn, каждое уравнение системы обращается в верное равенство. Упорядоченная совокупность чисел λ1, λ2, . . ., λn, называется решением системы (7.1).
Система линейных уравнений называется совместной, если она имеет решения, и, несовместной, если не имеет решений.
Если две совместные системы имеют одинаковые решения, то такие системы называются равносильными (или эквивалентными).
Совместная система линейных уравнений называется определенной, если она имеет только одно решение и неопределенной, если этих решений множество.
Ответы на эти вопросы дает метод Гаусса.