sin g =
Из рис. 2.5 по теореме косинусов находим:
lA3C = 
 lOA2 + lOC2 + 2lOAlOC cos j1 ;
lOA2 + lOC2 + 2lOAlOC cos j1 ;
j3 = arccos lOC + lOA cos j1lA3C
Из рис. 2.6 получаем выражения передаточных функций:
|
w3 |
= |
VA3 / lA3C |
= |
lOA |
× |
|
pa3 |
= |
|
lOA |
× cos (j - j |
) |
|
|
|
|
|
|
|
|
|
|
w1 |
|
VA12 / lOA |
lA3C |
pa12 |
|
|
lA3C |
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
VA12 A3 |
= |
VA12 A3 |
|
= l |
× |
a12a3 |
= l |
|
×sin (j - j |
|
) |
|
|
|
|
|
|
|
w1 |
|
|
|
OA |
|
|
|
|
OA |
1 |
3 |
|
|
VA12 / lOA |
|
pa12 |
|
|
|
|
|
4. Для кривошипно-ползунного четырехзвенного рычажного меха- низма (рис. 2.7) дано lOA ,lAB ,lAS 2 ,α,e,ϕ . Соответственно рис. 2.7 строим повернутый на 90° план скоростей (рис. 2.8).
Рис. 2.7. Кривошипно-ползунный |
Рис. 2.8. Повернутый план |
четырехзвенный рычажный механизм |
скоростей |
Из рис. 2.7 находим значения функций положения звеньев: e + lOA sin ϕ1
lAB
xB = lAB cos g + lOA cos j1
xS 2 = lOA cos j1 + lAS 2 cos(a - g) yS 2 = lOA sin j1 + lAS 2 sin (a - g)
Из рис. 2.8 получаем выражение передаточных функций:
|
VB |
= |
|
VB |
= l |
pb |
= l |
sin (j1 + g) |
= l |
sin (j1 + g) |
, |
w |
|
|
sin b |
cos g |
|
|
V |
/ l |
OA pa |
OA |
OA |
|
1 |
|
|
A |
OA |
|
|
|
|
|
|
|
поскольку b =180o - (90o - j1 ) - (j1 + g) = 90o - g ;
w |
= |
V |
|
/ l |
AB |
= |
l |
|
× |
ab |
= |
l |
|
× |
sin (90 - j1 ) |
= |
l |
|
× |
cosb |
|
2 |
|
AB |
|
OA |
|
OA |
|
OA |
1 |
; |
w |
|
/ l |
|
|
pa |
|
sin b |
|
cos g |
|
|
V |
A |
|
|
l |
AB |
|
l |
AB |
|
l |
AB |
|
1 |
|
|
|
OA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VS 2 |
= |
|
|
VS 2 |
, |
w |
|
V |
A |
/ l |
1 |
|
|
|
OA |
но, по теореме косинусов из |
|
aps2: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
V |
= V 2 |
+V |
2 |
- 2V V |
AS 2 |
cos(j + g - a) |
|
|
S 2 |
|
|
|
A |
|
|
AS 2 |
|
|
A |
|
|
1 |
|
|
где VAS 2 = w2 ×lAS 2 |
. Поэтому после преобразования: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
l |
AS 2 |
2 |
|
w |
2 |
|
l |
AS 2 |
w |
|
|
|
S 2 |
= l 1 |
+ |
|
|
× |
2 |
|
+ 2 |
|
|
2 |
cos(j + g - a) |
|
|
|
|
|
|
|
|
w1 |
OA |
lOA |
|
w1 |
|
lOA w1 |
1 |
|
|
|
|
|
|
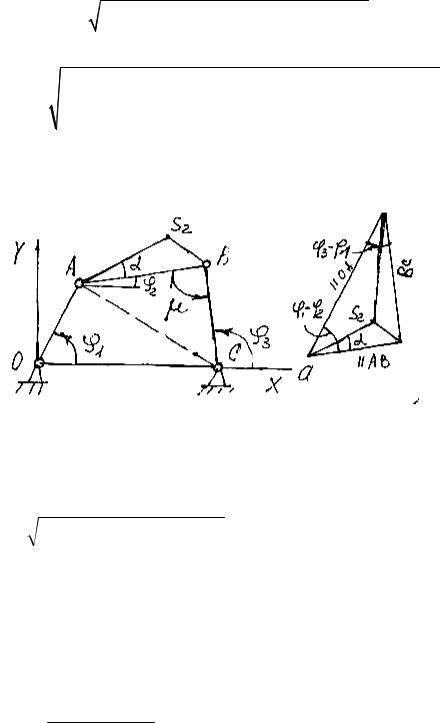
5. Для шарнирного четырехзвенника (2.9) дано
lOA ,lAB ,lBC ,lOC ,lAS 2 ,a и j . Соответственно рис 2.9 строим поверну-
тый на 90° план скоростей (рис. 2.10).
Рис. 2.9. Шарнирный четырехзвенник Рис. 2.10. Повернутый план скоростей
Из рис. 2.9 находим функции положения звеньев. Предварительно получили:
lAC = 
 lOA2 + lOC2 - 2lOAlOC cos j1 и m = arccos( A + B × cos j) ,
lOA2 + lOC2 - 2lOAlOC cos j1 и m = arccos( A + B × cos j) ,
где A = |
l2 |
+ l2 |
- l2 |
- l2 |
B = |
l |
×l |
|
|
|
|
|
|
|
AB |
BC |
|
OA |
OC |
; |
OA |
OC |
. |
|
|
|
|
|
|
|
2lABlBC |
|
lAB ×lBC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После чего: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
|
|
|
o |
l |
- l |
AO |
cos j |
|
|
j =180 |
|
- ÐACO - ÐACB =180 |
- arccos |
OC |
|
|
|
- |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
lAC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-arccos lBC - lAB cosm
lAC
ϕ2 = ϕ3 − μ ,
а угол давления:
g = m - 90o .
Из рис. 2.10 получаем выражения передаточных функций:
|
w3 |
= |
VB / lBC |
= |
lOA |
× |
|
pb |
= |
lOA |
× |
sin (j1 - j2 ) |
|
|
|
|
w |
|
|
V |
|
|
/ l |
|
|
|
|
l |
|
|
|
|
pa |
|
|
l |
|
|
|
|
|
sin m |
1 |
|
|
|
A |
|
|
OA |
|
|
BC |
|
|
|
|
|
|
BC |
|
sin (j1 - j3 ) |
|
w |
|
= |
V |
AB |
/ l |
AB |
= |
l |
|
|
|
× |
|
ab |
= |
l |
|
|
|
× |
|
2 |
|
|
|
OA |
|
|
|
|
|
OA |
|
|
|
|
|
|
w |
|
|
V |
A |
/ l |
|
|
|
|
|
l |
AB |
|
|
pa |
|
|
l |
AB |
|
sin m |
|
1 |
|
|
|
|
|
OA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VS 2 |
= |
|
|
VS 2 |
|
|
, но поскольку |
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
w |
|
|
A |
/ l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
OA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
= |
V |
|
2 |
+ V |
2 |
|
- 2V V |
AS 2 |
cos(j - j - a) |
, |
|
S 2 |
|
|
|
|
|
A |
|
|
|
AS 2 |
|
|
|
|
|
|
A |
|
|
|
|
|
1 2 |
|
|
|
VA = w1 ×lOA , |
а VAS 2 = w2 ×lAS 2 , то после преобразований: |
V |
|
l |
AS 2 |
S 2 |
= l |
1 + |
|
|
|
|
w1 |
OA |
lOA |
|
w |
2 |
l |
w |
|
|
|
2 |
|
- 2 |
SA2 |
|
2 |
cos(j - j - a) . |
|
|
w1 |
lOA w1 |
2 |
1 |
|
|
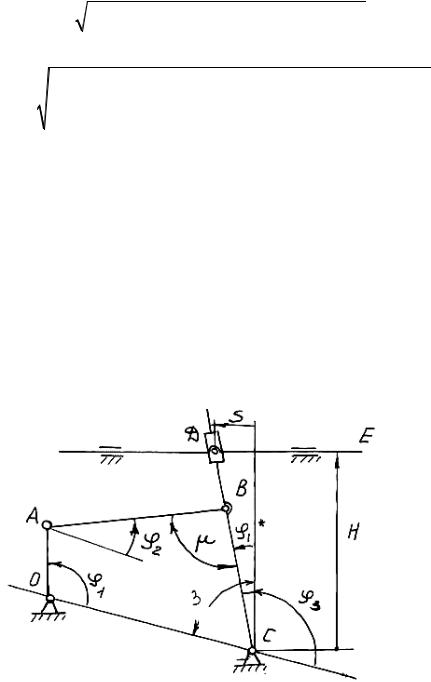
6. Для более сложных шестизвенных рычажных механизмов II-го класса функции положения звеньев могут быть определены по получен- ным ранее формулам составляющих четырехзвенных механизмов в зави- симости от того, из каких четырехзвенных механизмов данный шестизвен- ник состоит. Например, механизм на рис. 6, состоящий из шарнирного че- тырехзвенника ОАВС и присоединенного тангенсного механизма СДE, может бать исследован на основании формул, полученных для этих меха- низмов. В пп. 5.1 необходимо особо обратить внимание, как в составляю-
щих механизмах располагаются системы отсчета входных углов ( j1 и j1 )
и правильно записать выражение входного угла присоединяемого меха-
низма. Например, на рис. 2.11 j1 = b + j3 -180o .
β
Рис. 2.11. Рычажный шестизвенник II-го класса
Для вычисления передаточных функций в присоединяющем (шар- нирном четырехзвенном ОАВС) механизме можно воспользоваться непо- средственно формулами, полученными для этого механизма (в данном случае в п. 5), а в присоединяемом (тангенсном механизме CDE) восполь- зоваться правилом: если движение преобразуется двумя последовательно расположенными механизмами, то их передаточные функции перемножа-
ются. Например, в механизме по рис. 6:
VE = VE × ω3 , w1 w3 w1
где |
ω3 |
и |
VE |
– передаточные функции, вычисляемые в шарнирном че- |
|
|
w |
|
w |
|
1 |
3 |
|
тырехзвенном ОАВС и тангенсном CDE механизмах; |
|
ω3 – |
угловая скорость звена присоединения (на рис. 2.11 – звена ВС). |
Литература:
1.Курсовое проектирование по теории механизмов и машин / под ред. Г. Н. Девойно. – Минск : Выш. шк., 1986. – 285 с.
2.Зиновьев, В. А. Курс теории механизмов и машин / В. А. Зиновьев. –
М. : Наука, 1972. – 384 с.
3.Артоболевский, И. И. Теория механизмов и машин / И. И. Артобо-
левский. – М. : Наука, 1975. – 640 с.

ПРИЛОЖЕНИЕ 3
ТИПОВЫЕ АНАЛОГИ ОБРАБАТЫВАЮЩИХ МАШИН1
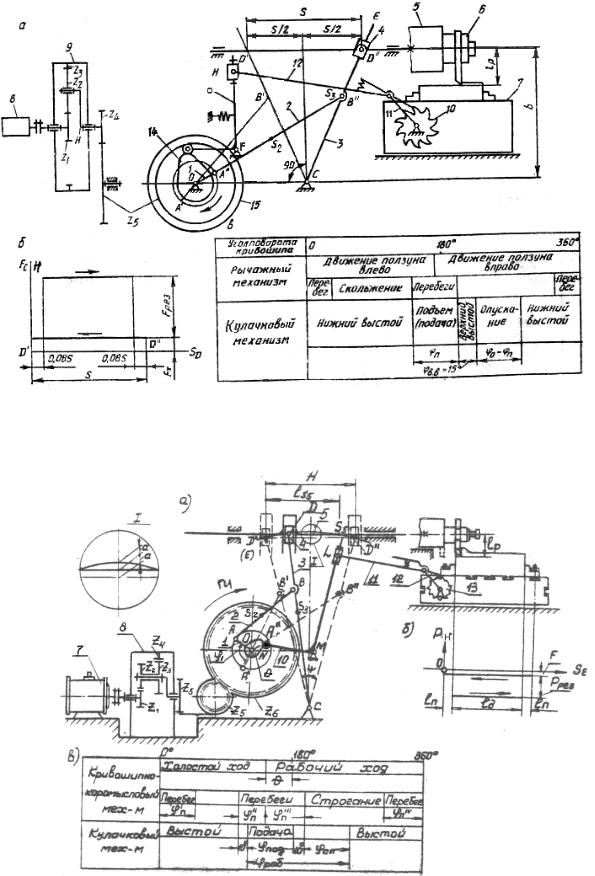
1. Поперечно-строгальный станок [1] (с. 237)2 (рис. 1)
Назначение и краткое описание работы механизмов
Станок (рис. 1, а) имеет следующие основные узлы: станину, ползун 5 с резцовой головкой 6, стол 7. Строгание металла осуществляется закре- пленным в резцовой головке резцом при его возвратно-поступательном движении в горизонтальном направлении.
Движение от электродвигателя 8 передается кривошипу 1 через пла- нетарный редуктор 9 и зубчатую передачу Z4 – Z5. Преобразование враща- тельного движения кривошипа 1 в возвратно-поступательное движение ползуна 5 осуществляется шестизвенным рычажным механизмом, состоя- щим из кривошипа 1, шатуна 2, качающейся кулисы 3, кулисного камня 4
иползуна 5. Сопротивление движению ползуна характеризуется диаграм- мой сил сопротивления (рис. 1, б). Ход S ползуна выбирается в зависимо- сти от длины обрабатываемой детали с учетом перебегов резца 0,08S и может регулироваться при наладке станка.
Во время перебегов резца в конце холостого и начале рабочего хо- дов происходит перемещение стола с обрабатываемой деталью при по- мощи ходового винта. Поворот винта производится посредством храпо- вого механизма, состоящего из колеса 10, рычага 11 с собачкой, тяги 12
икачающегося толкателя 13. Поворот толкателя осуществляется диско- вым кулачком 14, закрепленным на кривошипном валу. Подача регули- руется рычагом, что позволяет изменять количество зубьев, захватывае- мых собачкой, и тем самым обеспечивает поворот ходового винта на требуемый угол. Для получения необходимой равномерности движения на кривошипном валу закреплен маховик 15. Циклограмма механизмов показана на рис. 1, в.
1Используем и в курсовом проектировании
2Источник описания аналога и страница
Рис.1. Поперечно-строгальный станок, его механизмы и диаграммы
2. Поперечно-строгальный станок [2] (с. 12)
Рис. 2. Поперечно-строгальный станок, его механизмы и диаграммы
256
Назначение и краткое описание механизмов
Поперечно-строгальный станок (рис. 2, а) предназначен для строга- ния поверхностей. Основным механизмом является шестизвенный криво- шипно-коромысловый механизм, состоящий из кривошипа 1, шатуна 2, коромысла 3, ползунов 4 и 5. Привод состоит из зубчатой передачи Z5, Z6, планетарного редуктора 8 и электродвигателя 7. Диаграмма сил сопротив- ления движению ползуна 5 показана на рис. 2, б.
Перемещение стола на величину поперечной подачи производится с помощью ходового винта. Поворот винта производится посредством храпо- вого механизма, состоящего из колеса 13, рычага 12 с собачкой, тяги 11 и ко- ромыслового толкателя 10 (рис. 2, а). Поворот толкателя 10 осуществляется дисковым кулачком 9, который закреплен на валу 0 кривошипа. Регулирова- ние подачи стола производится путем изменения длины рычага ML.
При проектировании кулачкового механизма необходимо обеспечить заданный закон движения толкателя (рис. 2, г) и осуществить подачу стола во время перебегов резца в конце холостого и в начале рабочего ходов в соответствии с циклограммой (рис. 2, в).
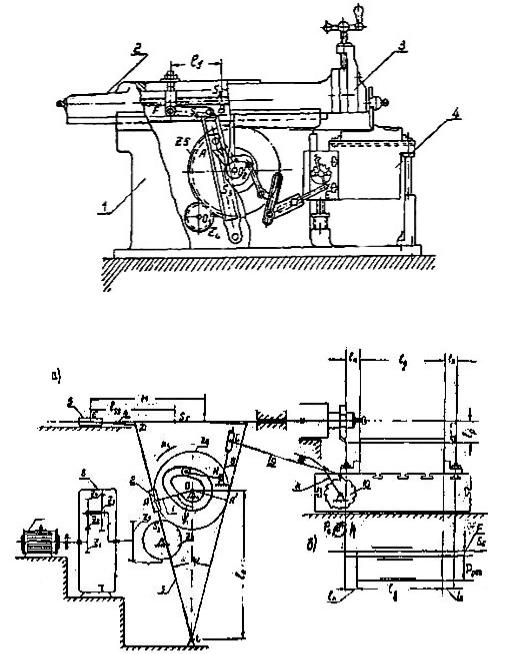
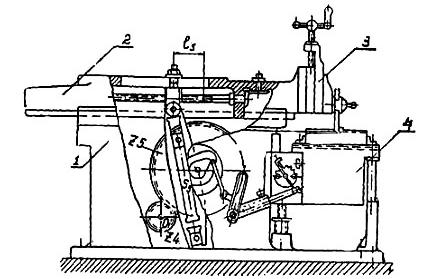
3. Поперечно-строгальный станок с качающейся кулисой [3] (c. 21)
Назначение и краткое описание работы механизмов
Поперечно-строгальный станок (рис. 3) предназначен для строгания поверхностей. Станок имеет следующие основные узлы: станина 1, ползун 2 с резцовой головкой 3, стол 4 (рис. 3). Привод состоит из зубчатой пере- дачи Z4, Z5, планетарного редуктора 6 и электродвигателя 7 (рис. 4, a).
Рис. 3. Общий вид поперечно-строгального станка с качающейся кулисой
Рис. 3.1. а) схема кривошипно-кулисного и кулачкового механизма; б) диаграмма сил сопротивления
Резание металла осуществляется резцом, закрепленным в резцовой головке, при его возвратно-поступательном движении в горизонтальном направлении.
Для движения ползуна с резцовой головкой используется шестизвен- ный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, ползунов 4 и 5. Диаграмма сил сопротивле- ния движению ползуна показана на рис. 3.1, б. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов ln в начале и конце рабочего хода. Длина хода ползуна может изменяться при на- ладке станка для обработки конкретных деталей. Средняя скорость резания (скорость поступательного движения при рабочем ходе) задают в зависимо- сти от условий обработки и применяемого инструмента.
Во время перебегов в конце холостого и в начале рабочего ходов осуществляется перемещение стола на величину подачи с помощью ходо- вого винта. Поворот винта производится посредством храпового механиз- ма, состоящего из колеса 10, рычага 11 с собачкой, тяги 9 и качающегося толкателя 8 (рис. 3.1, а).
258
Рис. 3.2. Законы изменения ускорений толкателя кулачкового механизма
Поворот толкателя 8 осуществляется от дискового кулачка, который выполнен в виде паза в теле зубчатого колеса Z5. Регулирование подачи стола производится путем изменения длины рычага LN, что позволяет из- менять количество зубьев, захватываемых собачкой, и, следовательно, обеспечивает поворот ходового винта на требуемый угол. При проектиро- вании кулачкового механизма необходимо обеспечить заданный закон движения толкателя (рис. 3.2) и осуществить подачу резца во время задне- го перебега (в конце холостого и в начале рабочего ходов) в соответствии с циклограммой, приведенной на рис. 3.3.
Рис. 3.3. Циклограмма работы механизмов строгального станка
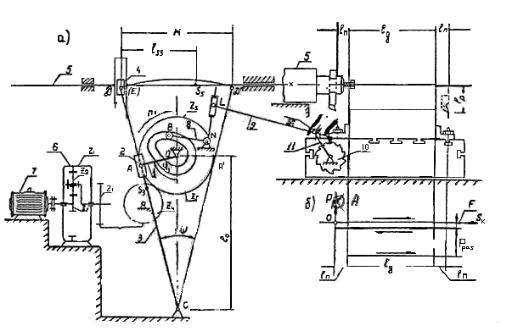
4. Поперечно-строгальный станок с качающейся кулисой [3] (c. 29)
Назначение и краткое описание работы механизмов
Поперечно-строгальный станок (рис. 4) предназначен для строгания поверхностей. Станок имеет следующие основные узлы: станина 1, ползун 2 с резцовой головкой 3, стол 4 (рис. 4). Привод состоит из зубчатой пере- дачи Z5, Z6, планетарного редуктора 6 и электродвигателя 7 (рис. 4.1, a).
259
Рис. 4. Общий вид поперечно-строгального станка с качающейся кулисой
Рис. 4.1. а) схема кривошипно-кулисного и кулачкового механизма; б) диаграмма сил сопротивления
Резание металла осуществляется резцом, закрепленным в резцовой головке, при его возвратно-поступательном движении в горизонтальном направлении.
Для движения ползуна с резцовой головкой используется шестизвен- ный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, шатуна 4 и ползуна 5. Диаграмма сил сопротивления движению ползуна 5 показана на рис. 3.8, б. Ход ползуна Н
260