

umk-teoriya-mehanizmov
.pdfиз равнобедренного треугольника O OB |
l = 2R × sin ϕ − θ . |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
OB |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя в соотношения (5.18) значения величин, после преобра- |
||||||||||||||||||||||||||||
зований получим: |
|
|
= 2R sin ϕ × cos |
θ ; |
|
|
|
|
= 2R sin θ × cos ϕ |
|
|
|
||||||||||||||||
|
l |
AB |
|
l |
. |
|
(5.19) |
|||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
OA |
|
|
2 |
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Из треугольника OCO : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R × sin |
ϕ |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tgβ = |
|
|
||||||
l |
= |
|
P2 + R2 + 2PR × cos ϕ ; |
|
|
(5.20) |
||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
|
R × cos ϕ + P |
|||||||||||||||||||||||||||
OC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Из треугольника |
O CB |
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
BC |
= |
|
P2 + R2 + 2PR × cos θ ; |
|
|
(5.21) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R × sin θ |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
tgψ = |
. |
|
|
|
|
|
|
(5.22) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
R × cos θ + P |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Задачу удобно решать в относительных размерах при R = 1, а вместо |
||||||||||||||||||||||||||||
параметра Р вводить угол размаха коромысла 2 ψ . |
|
|
|
|
||||||||||||||||||||||||
При этом в (5.19): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
l |
|
= 2sin ϕ |
× cos θ ; l |
|
|
= 2sin θ × cos ϕ , |
|
|
(5.23) |
|||||||||||||||||
|
|
|
AB |
|
|
2 |
|
|
|
|
|
|
2 |
OA |
|
|
2 |
|
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
из (5.22) |
|
|
|
|
|
|
|
|
|
|
|
|
sin(θ − ψ) |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
P = |
, |
|
|
|
|
|
|
|
(5.24) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin ψ |
|
|
|
|
|
|
|
|
|
|
||||
а из (5.20) и (5.21): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
l |
|
|
|
1 + P2 + 2P × cos ϕ |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
OC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lBC = |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
1 + P2 + 2P × cos θ . |
|
|
|
(5.25) |
||||||||||||||||||
|
|
|
|
|
β = arctg |
|
|
sin ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
P |
+ cos ϕ |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Таким образом, задавая ϕ и ψ при известной величине θ , можно рассчитать все относительные размеры шарнирного четырехзвенника.
К сожалению, не все задаваемые ϕ и ψ обеспечат получение меха-
низмов с допустимым интервалом угла давления – 45° ≤ [γ] ≤ 45° .
Проведены исследования, позволяющие по таблицам (прил. 4) вы- брать механизмы с допускаемым интервалом γ и по формулам (5.23 – 5.25) определить их размеры. Исследования показывают, что приемлемые ин-
тервалы γ у шарнирного четырехзвенника могут быть лишь при
0 < θ < 20° .
71
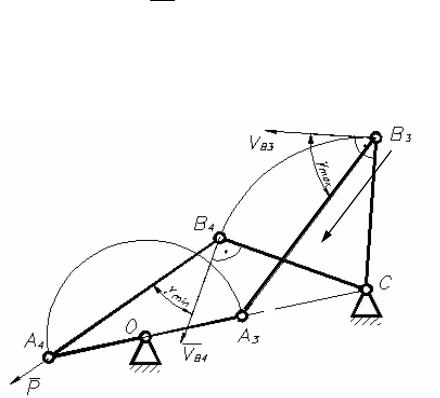
Экстремумы углов γ наступают тогда, когда ОА совмещается со стойкой ОС внешним, либо внутренним образом (положения OA3B3C и OA4 B4C на рис. 5.36). При этом
γmax = arcsin( A ± B) ,
min
|
|
l*2 |
+ l*2 |
- l*2 |
- l*2 |
l* |
×l* |
|
|||
где |
A = |
AB |
BC |
|
OA |
OC |
; B = |
ОС |
ОА |
. |
(5.26) |
|
2 ×l* |
|
×l*2 |
|
l* |
|
|||||
|
|
|
|
|
|
×l* |
|
||||
|
|
|
АВ |
ВС |
АВ |
ВС |
|
||||
По этим формулам уточняют интервал угла γ для механизма, полу- ченного с помощью таблиц.
Рис. 5.36. Шарнирный четырехзвенник в положениях экстремумов угла давления
Синтез кривошипно-ползунного механизма осуществляется анало-
гично синтезу шарнирного четырехзвенника (с помощью круга), причем В1В2 – ход ползуна, а перпендикуляр из центра вращения кривошипа О на направление В1В2 – эксцентриситет. Максимальное значение θ при прием- лемых интервалах γ не более 8° (для поступательных кинематических пар допустимым интервалом γ является [–30˚ ≤ γ ≤ 30˚]). Подробнее смотри в работе [5].
Если требуется получить θ > 20° , приходится применять кулисный механизм (рис. 5.37, 5.38).
Кулиса ВС на рис. 5.37 колеблется между положениями, когда она оказывается касательной к окружности радиуса lОА.
Синтез кулисного механизма обычно проводят по углу перекрытия θ и длине хорды B1 B2 ( lB1B2 ), которую определяют через ход H присоеди-
няемого механизма. На рис. 5.37 и 5.38 изображены крайние положения кулисного механизма.
72
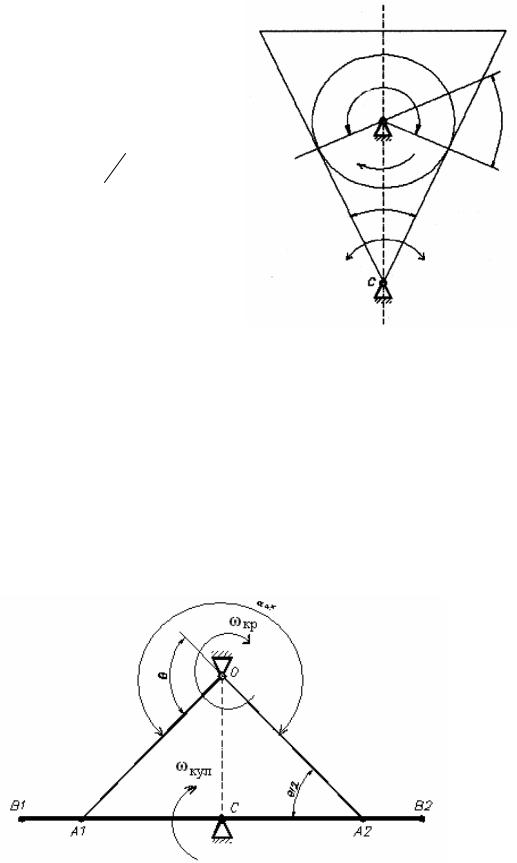
Поскольку стороны угла А1СА2 B1 |
|
B2 |
||||||||
(рис. 5.37) перпендикулярны сторонам |
|
|
||||||||
угла θ , то и ÐA1CA2 = q . |
|
|
α p.x |
|||||||
В равнобедренном треугольнике |
|
|||||||||
|
|
|||||||||
B1CB2 боковая сторона ВС: |
|
θ |
||||||||
|
|
lBC |
= |
|
lB1B2 |
|
. |
|
ωкр |
|
|
|
|
×sin q |
|
||||||
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
2 |
|
|
|
|
|
В |
прямоугольном треугольнике |
|
θ |
|||||||
|
lOA |
= sin θ . |
|
|
|
|
||||
A CО: |
|
|
|
|
ωкул |
|||||
|
|
|
|
|
||||||
1 |
lOC |
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
С другой стороны, кулисный |
|
|
||||||||
камень В не будет сниматься с кулисы, |
|
|
||||||||
когда палец кривошипа А пересекает |
|
|
||||||||
ось уу, если lBC |
≈ 1,3× (lOC |
+ lOA ) . |
Рис. 5.37. Кулисный механизм |
|||||||
с кулисой – |
коромыслом |
|||||||||
|
|
|
|
|
|
|
|
|||
Два последних уравнения определяют lOA и lOC .
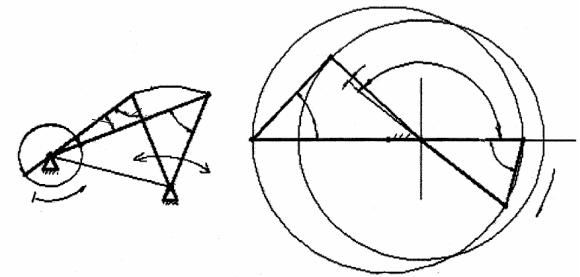
Аналогично поступают во втором случае механизма, когда его кули- са становится кривошипом (рис. 5.38), считая крайними положения меха-
низма при ÐВ СВ =180o |
. При этом: |
|
|
|
|
|
|
|
|
||||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
lOC |
= sin θ ; l |
AC |
= l |
cos θ |
; |
l |
@ 1,3l |
AC |
; |
l |
|
= 2l |
|
|
|
|||||||||||
|
|
|
OC |
|
|
BC |
|
|
B B |
BC |
|||
|
lOA |
2 |
|
|
2 |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
и определяется через ход присоединяемого механизма.
Рис. 5.38. Кулисный механизм с кулисой – кривошипом
73
Синусный механизм имеет θ = 0 не зависимо от размеров, а тан- генсный не проворачивается. Поэтому эти механизмы не проектируют по заданному углу θ, а применяют как присоединяемые к одному из трех рас- смотренных ранее, обеспечивая заданный ход H.
Синтез этих механизмов по заданному ходу обычно затруднений не вызывает.
5.8.3. Использование метода обращения движения в синтезе
плоских рычажных механизмов
Метод обращения движения с успехом применялся при изучении эпициклических механизмов, также он дает высокие результаты в синтезе рычажных, кулачковых и других механизмов.
К примеру, он позволяет рычажные механизмы, выполняющие различ- ные функции (воспроизведения и огибания кривых [12] с целью обработки поверхностей [13], получения движения с остановками [14] и т.п.) без суще- ственных переделок применить в машинах карусельного типа [15].
В работе [16] с помощью метода инверсии класс симметричных кру- говых механизмов основателя ТММ П.Л. Чебышева [17] увеличен вдвое за счет двухкривошипных круговых направляющих механизмов, получен ры- чажный удвоитель вращения. Двухкривошипные передаточные рычажные механизмы способны накапливать в своих звеньях больший запас кинети- ческой энергии, обеспечивать более устойчивое выполнение задаваемых технологий при установленных требованиях к производительности машин.
Пусть исходный четырехзвенник ОАВС имеет размеры lOA , lАВ, lBC, lOC; φ1 – его обобщенная координата, µ – угол передачи, определяющий угол давления γ ( γ = 90 − μ ). Размеры определяет задаваемый коэффициент η* (см. выше), φ2 и φ3 углы звеньев 2 и 3 со стойкой ОС.
В исходной однокривошипной схеме за цикл:
∑Δϕ1 = 360o, ∑Δϕ2 = 0, ∑Δϕ3 = 0, ∑Δϕ0 = 0,
где Δφi – приращение углов звеньев с осью х.
74
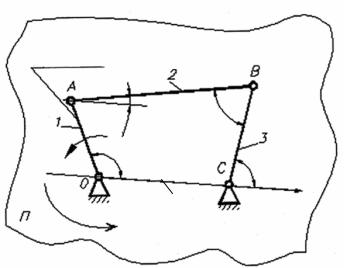
кривошип
φ2 µ
ω
φ1 φ3
0
ω
Рис. 5.39. Принцип обращения движения в синтезе рычажных механизмов
Обратим движение, для чего введем в рассмотрение плоскость П, вра- щающуюся вокруг оси О с угловой скоростью ω кривошипа, и поместим на нее наблюдателя. Для наблюдателя все звенья механизма получают дополни- тельные угловые скорости, равные ω кривошипа, но со знаком «минус». За цикл углы поворота звеньев уменьшатся на 360°, т.е. в обращенном движе-
нии звено ОА ометает угол ϕ |
= 360o − 360o = 0 (становится неподвижным); |
|||
звено АВ: ϕ |
1 |
|
|
|
= 0 − 360o = −360o, совершит полный оборот в направлении |
||||
2 |
|
|
|
ϕ = 0 − 360o = −360o, |
вращения |
кривошипа. |
Также |
будет: |
|
|
|
|
|
3 |
ϕ0 = 0 − 360o = −360o – стойка станет кривошипом. Т.е. для подвижного на-
блюдателя первое звено (кривошип) будет казаться неподвижным (стой- кой), нулевое звено ОС – кривошипом, вращающимся в направлении, про- тивоположном вращению кривошипа. Подвижный и неподвижный наблю- датели воспринимают механизм по-разному, и оба взгляда справедливы. Т.к. длины звеньев не изменяются, то относительное их положение при одинаковых φ1 будет одинаково. Следовательно, ни интервал угла µ, ни интервал угла γ в процессе преобразования не изменятся.
У полученного двухкривошипного механизма крайние положения наступают, когда палец В ведомого кривошипа ОВ изменяет направление движения на противоположное (т.е. после того, когда звенья ОА и АВ рас- положатся на одной прямой). Определив положение двух других звеньев с помощью метода засечек, легко узнаем в крайних положениях преобразо- ванного механизма соответствующие положения исходного четырехзвен- ника, развернутые друг по отношению к другу на угол αр.х. (до совмещения
75
точек А1 и А2). Следовательно, при преобразовании четырехзвенника мето- дом обращения движения угол θ не изменяется.
Исходя из изложенного делаем вывод: чтобы получить двухкриво- шипный четырехзвенник с требуемыми относительными размерами звень- ев, углом перекрытия θ и интервалом угла давления γ (рис. 5.40) необхо- димо спроектировать по таким показателям кривошипно-коромысловый механизм, закрепить в нем кривошип, а стойку сделать ведущей и обратить движение с направлением отсчета угла φ в противоположном направлении
(рис. 5.40).
a) |
|
|
|
б) |
|
|
|
|
|
|
|
C2 |
θ |
αp.x. |
|
|
|
|
|
|
|
||
|
|
B1 |
B2 |
|
|
|
|
αр.x/ |
θ |
µ2 |
|
µ2 |
|
|
B1 |
µ1 |
|
|
|
O |
|||
O |
|
B2 |
|
|
|||
A2 |
|
|
A1. A2 |
|
|
||
|
|
|
|
µ1 |
|||
A1 |
|
|
C |
|
|
|
|
|
|
|
|
|
|
||
ω |
|
|
|
|
|
|
C1 |
|
|
|
|
|
|
|
ωOA |
Рис. 5.40. Исходный и обращенный шарнирные четырехзвенники: а) кривошипно-коромысловый; б) двухкривошипный
5.9.Кулачковые механизмы
5.9.1.Назначение и краткие характеристики
Кулачковые механизмы (рис. 5.41) широко применяются для управ- ления вспомогательными механизмами машин – автоматов по жесткой программе (циклограмме, которую предварительно разрабатывают). При необходимости управления несколькими механизмами, кулачки насажи- вают на один вал – получается кулачковый командоаппарат.
Кулачковые механизмы обладают широкими кинематическими воз- можностями. Они просты в изготовлении, но содержат высшую кинематиче- скую пару, а, следовательно, недолговечны. Они могут обеспечить любой за- кон движения, в том числе с остановками заданной продолжительности.
76
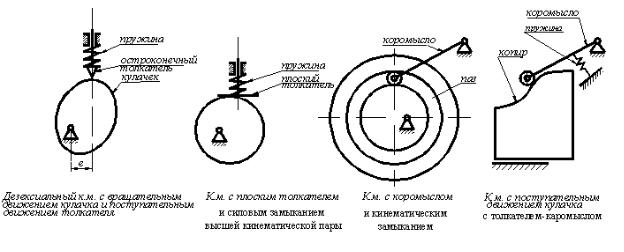
Эти механизмы включают: профильное звено – кулачок, движущий- ся вращательно или поступательно; толкатель – ведомое звено с острием, роликом, либо плоскостью, контактирующее с кулачком и совершающее качательное, возвратно-поступательное или плоское движение. В меха- низмах предусматриваются замыкания высшей кинематической пары – си- ловое (пружиной) или кинематическое (с помощью паза в кулачке). Меха- низмы бывают пространственные и плоские. Наиболее часто применяются плоские кулачковые механизмы.
а) |
b) |
c) |
d) |
|
|
|
|
Рис. 5.41. Основные виды плоских кулачковых механизмов
5.9.2. Конструирование закона движения толкателя
За цикл движения кулачкового механизма (кулачек поворачивается на 360o либо он совершает одно возвратно-поступательное движение – схема d), толкатель может совершить:
1.Удаление (подъем) – движение из крайнего нижнего в крайнее верхнее положение.
2.Верхний выстой. Для получения его профиль кулачка очерчивают дугой окружности из центра его вращения (на схеме d – по прямой).
3.Возвращение в крайнее нижнее положение.
4.Выстой в крайнем нижнем положении (профиль кулачка также очерчивают по дуге либо прямой).
Углы поворота кулачка, соответствующие указанным движениям толка-
теля, называют фазовыми углами удаления, дальнего выстоя, возвращения и ближнего выстоя (ϕу,ϕд.в.,ϕв,ϕб.в. ). Очевидно, при вращении кулачка:
ϕу + ϕд.в. + ϕв + ϕб.в = 360° .
77
В частных случаях может быть ϕд.в. = 0 , ϕб.в. = 0 , а ϕу = ϕв .
Для выбора фазовых углов кулачков разрабатывают программу для системы управления исполнительными органами вспомогательных меха- низмов машины-автомата, обеспечивающую согласованность их движения при выполнении заданного техпроцесса. Программа для системы управле- ния по времени называется циклограммой. Ее строят в функции обобщен- ной координаты машины. В качестве нее целесообразно принять угол по- ворота главного вала машины и рассмотреть при этом время одного техно- логического цикла.
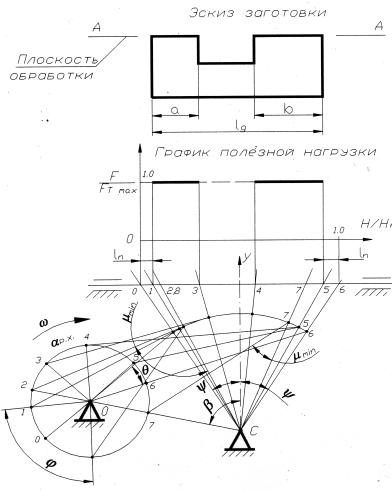
На рис. 5.42 изображен план характерных положений несущего ме- ханизма при обработке заготовки строгальным станком, а на рис. 5.43 – циклограмма совместной работы механизмов несущего и поперечной по- дачи стола с закрепляемой на нем заготовкой. Стол приводится от кулачка, установленного на главном валу О станка, т.е. на валу кривошипа несуще- го механизма.
Рис. 5.42. План характерных положений несущего механизма машины
78
На рис. 5.42 построены:
1.Крайние положения 0 и 6 несущего механизма – для проверки за- даваемого хода H и угла перекрытия θ.
2.Положения 2 и 7 – для проверки расчетного интервала угла давле- ния в шарнирном четырехзвеннике ОАВС.
3.Положения 8 и 1 (начало – конец перебега в конце холостого – на- чале рабочего ходов) для определения продолжительности поперечной по- дачи стола.
4.Положения 3, 4 и 5 на рабочем ходу соответствуют характерным точкам на графике нагрузки.
Угол поворота |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
главного вала φº |
0 |
φ |
1 |
|
180º 180º +θ |
φ2 |
360º |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
План переме- |
|
|
Рабочий ход |
|
|
|
|
|
Холостой |
|
ход |
|||
|
|
|
|
|
|
|
|
|||||||
щений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рабочего ор- |
|
Перебег |
Резание |
Перебег |
|
Скольжение |
|
Перебег |
||||||
гана (резца) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механизм |
Поперечная |
|
|
|
|
|
|
|
|
|
|
Попереч- |
||
|
подача |
|
|
|
|
|
|
|
|
|
|
|||
поперечной |
|
|
Выстой |
|
|
|
|
ная подача |
||||||
|
(заверше- |
|
|
|
|
|
||||||||
подачи |
|
|
|
|
|
|
|
|
|
|
|
(начало) |
||
|
ние) |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Кулачковый |
|
|
|
|
ϕд.в. + ϕв. + ϕб.в. |
|
|
|||||||
механизм |
|
φy |
|
|
φy |
|||||||||
подачи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.43. Циклограмма работы поперечно-строгального станка |
|
|||||||||||||
Ось φ циклограммы разбита в соответствии с планом характерных положений несущего механизма (рис. 5.42), значения φ1 и φ2 – конца и на- чала перебегов, замеряют на этом плане, затем вычисляют фазовый угол удаления:
ϕy = 360o − ϕ2 + ϕ1.
Оставшийся угол поворота кулачка ϕ2 − ϕ1 разбит между другими фазовыми углами φд.с., φв и φб.с. произвольно. Его можно разбить исходя из каких-либо иных соображений, например, из условия возможности согла- сованной работы с другими механизмами.
Циклограмма дает возможность выбрать фазовые углы кулачковых механизмов и определить углы установки кулачков на главном валу. Зако- ны перемещения толкателя на фазах удаления и возвращения должны быть выбраны, исходя из назначения механизма и особенностей машинной тех- нологии. Рассмотрим базовые законы.
79
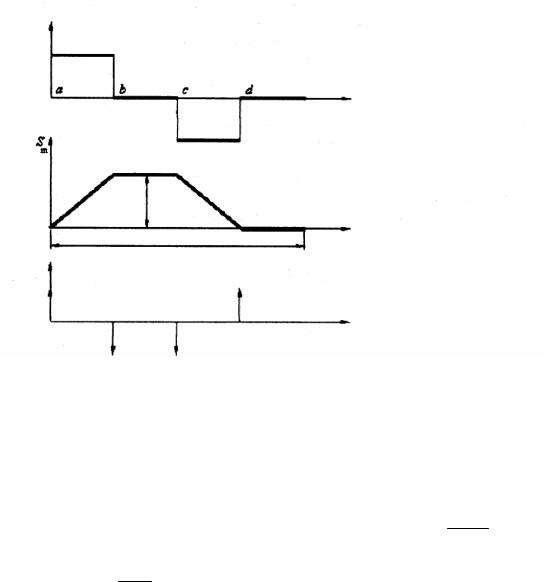
А) Закон равной скорости (рис. 5.44). Обеспечивает постоянство
мощности при постоянной нагрузке на толкатель: |
||||||||||||||
|
|
|
V = |
dSm |
× |
dϕk |
= |
dSm |
× ω . |
|||||
|
|
|
|
|
|
|
||||||||
|
|
|
т |
dϕk |
|
dt |
|
|
|
k |
||||
Если ωк = const , то |
|
|
dϕk |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
dSm |
= const и V = const . |
|||||||||
|
|
|
|
|
||||||||||
|
|
|
|
dϕk |
|
|
|
|
m |
|||||
|
|
|
|
|
|
|
|
|
||||||
Здесь Sm, Vm – перемещение и скорость ценра ролика толкателя; ωk – |
||||||||||||||
угловая скорость кулачка. |
|
|
|
|
|
|
|
|
|
|
||||
Vm , |
dSm |
|
|
|
|
|
|
|
|
|
|
|
|
|
dϕk |
|
|
|
|
|
|
|
|
|
|
|
Исходный график |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
360° |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φу |
|
φв.в. |
|
|
|
φв. |
|
|
|
φб.с. φk |
||
μ S = |
S |
max |
|
м |
Smax – ход толкателя |
|
|
|
|
; |
|||
ymax |
|
|||||
|
|
мм |
|
|||
|
|
|
|
max |
|
|
|
|
y |
am , |
d |
2S |
m |
xmax |
dϕk2 |
+∞ |
|||
+∞
Функция положения
φk μϕ |
= |
2π |
|
|
|
|
|
|
рад |
||
|
|
|
|
|
|
|
|
хmax |
мм |
||
– ∞ |
– ∞ |
φk |
|
|
Рис. 5.44. Закон равной скорости
Функцию положения получаем, интегрируя график скорости. Интег- рирование выполняем на основе геометрического смысла интеграла: это – площадь между осью абсцисс и интегрируемой кривой. Чтобы найти уско-
рение, дифференцируем функцию скорости. Чтобы найти функцию d 2Sт , dϕк2
дифференцируем функцию dSт . В обоих случаях пользуемся геометриче- dϕк
ским смыслом производной: это – тангенс угла наклона касательной к дифференцируемой кривой. В точках излома кривой abcd тангенс изменя- ется от −∞ до +∞ , т.к. угол касательной меняется от 0 до 90°. Вследствие этого в указанных точках имеет место «жесткий удар» (ускорение меняет-
80