

Механика— раздела физики, изучающего законы изменения положений тел в пространстве со временем и причины, это вызывающие, основанный на законах Ньютона. Поэтому её часто называют «Ньютоновской механикой».
Классическая механика подразделяется на:
статику(которая рассматривает равновесие тел)
кинематику(которая изучает геометрическое свойство движения без рассмотрения его причин)
динамику(которая рассматривает движение тел).
Основные понятия механики:
Пространство. Считается, что движение тел происходит в пространстве, являющимся евклидовым, абсолютным (не зависит от наблюдателя), однородным (две любые точки пространства неотличимы) и изотропным (два любых направления в пространстве неотличимы).
Время— фундаментальное понятие, не определяемое в классической механике. Считается, что время является абсолютным, однородным и изотропным (уравнения классической механики не зависят от направления течения времени)
Система отсчёта– состоит из тела отсчёта (некоего тела, реального или воображаемого, относительно которого рассматривается движение механической системы) и системы координат
Материальная точка— объект, размерами которого в задаче можно пренебречь. В действительности, любое тело, которое подчиняется законам классической механики, обязательно имеет ненулевой размер. Тела ненулевого размера могут испытывать сложные движения, поскольку может меняться их внутренняя конфигурация, например, тело может вращаться или деформироваться. Тем не менее, в определённых случаях к подобным телам применимы результаты, полученные для материальных точек, если рассматривать такие тела, как совокупности большого количества взаимодействующих материальных точек.
Масса— мера инертности тел.
Радиус-вектор — вектор, проведённый из начала координат в точку расположения тела, характеризует положение тела в пространстве.
Скоростьявляется характеристикой изменения положения тела со временем, определяется как производная пути по времени.
Ускорение— скорость изменения скорости, определяется как производная скорости по времени.
Импульс — векторная физическая величина, равная произведению массы материальной точки на её скорость.
Кинетическая энергия — энергия движения материальной точки, определяемая как половина произведения массы тела на квадрат его скорости.
Сила— физическая величина, характеризующая степень взаимодействия тел между собой. Фактически, определением силы является второй закон Ньютона.
Консервативная сила— сила, работа которой не зависит от формы траектории (зависит только от начальной и конечной точки приложения сил). Консервативные силы — такие силы, работа по любой замкнутой траектории которых равна 0. Если в системе действуют только консервативные силы, то механическая энергия системы сохраняется.
Диссипативные силы— силы, при действии которых на механическую систему её полная механическая энергия убывает (то есть диссипирует), переходя в другие, немеханические формы энергии, например, в теплоту.
Основные законы механики
Принцип относительности Галилея- основной принципом, на котором базируется классическая механика является принцип относительности, сформулированный на основе эмпирических наблюдений Г. Галилеем. Согласно этому принципу существует бесконечно много систем отсчёта, в которых свободное тело покоится или движется с постоянной по модулю и направлению скоростью. Эти системы отсчёта называются инерциальными и движутся друг относительно друга равномерно и прямолинейно. Во всех инерциальных системах отсчёта свойства пространства и времени одинаковы, и все процессы в механических системах подчиняются одинаковым законам.
Законы Ньютона
Основой классической механики являются три закона Ньютона.
Первый закон Ньютонаустанавливает наличие свойства инертности у материальных тел и постулирует наличие таких систем отсчёта, в которых движение свободного тела происходит с постоянной скоростью (такие системы отсчёта называются инерциальными).
Второй закон Ньютонавводит понятие силы как меры взаимодействия тела и на основе эмпирических фактов постулирует связь между величиной силы, ускорением тела и его инертностью (характеризуемой массой). В математической формулировке второй закон Ньютона чаще всего записывается в следующем виде:

где F—результирующий вектор сил, действующих на тело;
a— вектор ускорения тела;
m — масса тела.
Третий закон Ньютона- для каждой силы, действующей на первое тело со стороны второго, существует противодействующая сила, равная по величине и противоположная по направлению, действующей на второе тело со стороны первого.
Закон сохранения энергии
Закон сохранения энергии является следствием законов Ньютона для замкнутых систем, в которых действует только консервативные силы. Полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остаётся постоянной.
Теория машин и механизмов
Основные понятия и определения.
Теория механизмов и машин занимается исследованием и разработкой высокопроизводительных механизмов и машин.
Механизм – совокупность подвижных материальных тел, одно из которых закреплено, а все остальные совершают вполне определенные движения, относительно неподвижного материального тела.
Звенья – материальные тела, из которых состоит механизм.
Стойка– неподвижное звено.
Стойка
изображается . Звено, к которому
изначально сообщается движение,
называется входным
(начальным, ведущим). Звено, совершающее
движение, для выполнения которого
предназначен механизм – выходное
звено.
Кривошипно- ползунный механизм
Если это компрессор, то зв.1 – входное, а зв.3 – выходное.
Если это механизм ДВС, то зв.3 – входное, а зв.1 – выходное.
Кинематическая пара – подвижное соединение звеньев, допускающее их относительное движение. Все кинематические пары на схеме обозначают буквами латинского алфавита, например A, B, C и т.д.
Если
, то К.П. – вращательная ; если , то
поступательная.

Порядок нумерации звеньев:
входное звено – 1;
стойка – последний номер.
Звенья бывают:
простые – состоят из одной детали;
сложные – состоят из нескольких, жестко скрепленных друг с другом и совершающих одно и тоже движение.
Например, шатунная группа механизма ДВС.
Звенья, соединяясь друг с другом, образуют кинематические цепи, которые разделяют на:
простые и сложные;
замкнутые и разомкнутые.
Машина – техническое устройство, в результате осуществления технологического процесса определенного рода, можно автоматизировать или механизировать труд человека.
Машины условно можно разделить на виды:
энергетические;
технологические;
транспортные;
информационные.
Энергетические машины разделяют на:
двигатели;
трансформирующие машины.
Двигатель – техническое устройство, преобразующее один вид энергии в другой. Например, ДВС.
Трансформаторная машина – техническое устройство, потребляющее энергию извне и совершающее полезную работу. Например, насосы, станки, прессы.
Техническое объединение двигателя и технологической (рабочей машины) – Машинный агрегат (МА).
Двигатель имеет определенную механическую характеристику, рабочая машина тоже.
1 – скорость, с которой вращается вал двигателя;
2 – скорость, с которой будет вращаться главный вал рабочей машины.
1 и 2 нужно поставить в соответствие друг другу.
Например, число оборотов n1 =7000 об/мин., а n2=70 об/мин.
Чтобы привести в соответствие механические характеристики двигателя и рабочей машины, между ними устанавливают передаточный механизм, который имеет свои механические характеристики.
uП=1/2=700/70=10

В качестве передаточного механизма могут быть использованы:
фрикционные передачи (с использованием трения);
цепные передачи (привод мотоцикла);
зубчатые передачи.
В качестве рабочей машины наиболее часто используют рычажные механизмы.
Основные виды рычажных механизмов.
1. Кривошипно-ползунный механизм.
а) центральный (рис.1);
б) внеосный (дезоксиальный) (рис.2);
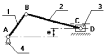
е - эксцентриситет
Рис. 2
1-кривошип, т.к. звено совершает полный оборот вокруг своей оси;
2-шатун, не связан со стойкой, совершает плоское движение;
3-ползун (поршень), совершает поступательное движение;
4-стойка.
2.
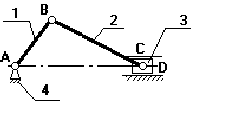
Четырехшарнирный механизм.
Звенья 1,3 могут быть кривошипами.
Если зв.1,3 – кривошипы, то механизм двукривошипный.
Если зв.1 – кривошип (совершает полный оборот), а зв.3 – коромысло (совершает неполный оборот), то механизм кривошипно-коромысловый.
Если зв.1,3 – коромысла, то механизм двукоромысловый.
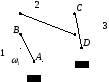
3. Кулисный механизм.

1 - кривошип;
2 - камень кулисы (втулка) вместе с зв.1 совершает полный оборот вокруг А (1 и 2 одно и тоже), а также движется вдоль зв.3, приводя его во вращение;
3 - коромысло (кулиса).
4.Гидроцилиндр
(в
кинематическом отношении подобен
кулисному механизму).
В процессе проектирования конструктор решает две задачи:
анализа (исследует готовый механизм);
синтеза (проектируется новый механизм по требуемым параметрам);
Структурный анализ механизма.
Понятия о кинематических парах и их классификация.
Два звена неподвижно связанных между собой образуют кинематическую пару. Все кинематические пары подвергаются двум независимым классификациям:
Пары бывают высшие или низшие:
Высшие пары – пары, в которых контакт осуществляется по линии.
Низшие пары – пары, в которых контакт осуществляется по поверхности.
Все пары делятся на пять классов, в зависимости от числа налагаемых связей на подвижность каждого из звеньев. Число степеней подвижности обозначается за
 .
Число налагаемых связей обозначается
за
.
Число налагаемых связей обозначается
за .
При этом число степеней подвижности
можно определить по формуле:
.
При этом число степеней подвижности
можно определить по формуле: .
.Пара первого класса:
 ;
; .
.Пара второго класса:
 ;
; .
.Пара третьего класса:
 ;
; .
.Пара четвёртого класса:
 ;
; .
.Пара пятого класса:
 ;
; .
.


Примеры классификации пар:

Рассмотрим
кинематическую пару «винт-гайка». Число
степеней подвижности этой пары
 равно 1, а число налагаемых связей
равно 1, а число налагаемых связей равно 5. Это пара будет являться парой
пятого класса, свободным можно выбрать
только один вид движения для винта или
гайки, а второе движение будет
сопутствующим.
равно 5. Это пара будет являться парой
пятого класса, свободным можно выбрать
только один вид движения для винта или
гайки, а второе движение будет
сопутствующим.
Кинематическая
цепь –
звенья, связанные между собой
кинематическими парами различных
классов.
Кинематические цепи бывают пространственными и плоскими.
Пространственные кинематические цепи – цепи, звенья которых двигаются в различных плоскостях.
Плоские кинематические цепи – цепи, звенья которых двигаются в одной или параллельных плоскостях.
Понятия о степени подвижности кинематических цепей и механизмов.
Число
звеньев свободно парящих в пространстве
обозначим за
 .
Для
.
Для звеньев степень подвижности можно
определить по формуле:
звеньев степень подвижности можно
определить по формуле: .
Образуем из этих
.
Образуем из этих звеньев кинематическую цепь, соединив
между собой звенья парами различных
классов. Число пар различных классов
обозначается за
звеньев кинематическую цепь, соединив
между собой звенья парами различных
классов. Число пар различных классов
обозначается за ,
где
,
где - класс, то есть:
- класс, то есть: - число пар первого класса, у которого
- число пар первого класса, у которого ,
а
,
а ;
; - число пар второго класса, у которого
- число пар второго класса, у которого ,
а
,
а ;
; - число пар третьего класса, у которого
- число пар третьего класса, у которого ,
а
,
а ;
; - число пар четвёртого класса, у которого
- число пар четвёртого класса, у которого ,
а
,
а ;
; - число пар пятого класса, у которого
- число пар пятого класса, у которого ,
а
,
а .
Степень подвижности образованной
кинематической цепи можно определить
по формуле:
.
Степень подвижности образованной
кинематической цепи можно определить
по формуле:
 .
.
Образуем из кинематической цепи механизм. Одним из основных признаков механизма является наличие стойки (корпуса, основания), около которого движутся остальные звенья под действием ведущего звена (звеньев).
Степень
подвижности механизма принято обозначать
за
 .
Одно из звеньев кинематической цепи
превратим в стойку, то есть отнимем у
него все шесть степеней подвижности,
тогда:
.
Одно из звеньев кинематической цепи
превратим в стойку, то есть отнимем у
него все шесть степеней подвижности,
тогда: - формула Сомова-Малышева.
- формула Сомова-Малышева.
В
плоской системе максимальное число
степеней подвижности
 равно двум. Поэтому степень подвижности
плоской кинетической цепи можно
определить по следующей формуле:
равно двум. Поэтому степень подвижности
плоской кинетической цепи можно
определить по следующей формуле: .
Степень подвижности плоского механизма
определяется по формуле Чебышева:
.
Степень подвижности плоского механизма
определяется по формуле Чебышева: ,
где
,
где - число подвижных звеньев. Используя
определение высших и низших кинематических
пар формулу Чебышева можно записать
следующим образом:
- число подвижных звеньев. Используя
определение высших и низших кинематических
пар формулу Чебышева можно записать
следующим образом: .
.
Пример определения степени подвижности:
 ;
;
 ;
;
 ;
;
 .
.