

ASUTP_Literatura / Posobie_ASK_TP_LPZ
.pdfЛевицький С. М.
АВТОМАТИЗОВАНІ СИСТЕМИ КЕРУВАННЯ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ, УСТАТКУВАННЯМИ ТА КОМПЛЕКСАМИ.
Лабораторний практикум
Міністерство освіти і науки України
Вінницький національний технічний університет
С. М. Левицький
АВТОМАТИЗОВАНІ СИСТЕМИ КЕРУВАННЯ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ, УСТАТКУВАННЯМИ ТА КОМПЛЕКСАМИ.
Лабораторний практикум
Навчальний посібник
Вінниця
ВНТУ
2013

УДК 62-838:631.171(075)
ББК 40.76я73
Г 75
Рекомендовано до друку Вченою радою Вінницького національного технічного університету Міністерства освіти і науки, молоді та спорту України (протокол №4 від 25.11.2011 р.)
Рецензенти:
В. М. Кутін, доктор технічних наук, професор О. В. Садовой, доктор технічних наук, професор О. П. Чорний, доктор технічних наук, професор
Левицький, С. М.
Г75 Автоматизовані системи керування технологічними процесами, устаткуваннями та комплексами. Лабораторний практикум: навчальний посібник / С. М. Левицький. – Вінниця : ВНТУ, 2013. – 84 с.
Навчальний посібник є лабораторним практикумом. Рекомендований для студентів, що навчаються за фахом „Електромеханічні системи автоматизації та електропривод”, також може бути корисним фахівцям, що спеціалізуються на вдосконаленні типових схем регулювання технологічних параметрів та розробці людино-машинного інтерфейсу систем автоматизації.
УДК 62-838:631.171(075) ББК 40.76я73
С. Левицький 2012
Зміст |
|
Вступ ................................................................................................................ |
5 |
Лабораторна робота № 1. Основи роботи з програмованим логічним |
|
контролером Twido................................................................................... |
6 |
Лабораторна робота № 2. Розробка систем підпорядкованого керування |
|
об'єктами з використанням польової шини Modbus............................. |
14 |
Лабораторна робота № 3. Розробка людино-машинного інтерфейсу |
|
систем керування об’єктами з нерегульованим електроприводом на |
|
базі панелі оператора XBT N200............................................................ |
21 |
Лабораторна робота № 4. Розробка людино-машинного |
інтерфейсу |
систем керування об’єктами з регульованим електроприводом на базі |
|
панелі оператора XBT NR410................................................................. |
30 |
Лабораторна робота № 5. Розробка графічного людино-машинного |
|
інтерфейсу систем керування об’єктами з регульованим |
|
електроприводом на базі панелі оператора XBT GT2130..................... |
41 |
Лабораторна робота № 6. Дослідження системи регулювання з пі- |
|
регулятором на базі перетворювача частоти Altivar 31........................ |
62 |
Лабораторна робота № 7. Розробка людино-машинного інтерфейсу в |
|
середовищі Trace Mode 6....................................................................... |
67 |
Література ...................................................................................................... |
81 |
СЛОВНИК ОСНОВНИХ ТЕРМІНІВ (GLOSSARY) ................................... |
83 |
4
Вступ
Сучасний рівень автоматизації (automation) виробництва визначається інтеграцією систем керування електроприводами (electic drives) технологічних установок в комплексні системи автоматики та автоматизації технологічних процесів, устаткувань та комплексів. При цьому існує тенденція до поєднання задач управління електроприводами та технологічним обладнанням за допомогою мікропроцесорних (microprocessor) систем управління та створення єдиних комплексів АСУ ТП з використанням складних взаємозв’язків між засобами вимірювання і аналізу інформації про стани об’єктів, стани електроприводів, їх автоматичного управління.
Багато з елементів систем автоматичного керування окремими технологічними процесами та окремими електроприводами мають спільну будову, однак відрізняються динамікою своєї роботи та параметрами налаштування. Тому вивчення елементарної структури систем автоматизації та електроприводів обов’язково повинно проводитись в комплексі.
Кваліфікованому фахівцеві з електромеханіки недостатньо знань з теорії та систем керування електроприводами як відокремленої ланки. З електроприводом завжди пов’язують задачі підтримання певного технологічного параметру, його програмну роботу і тому потрібно оволодівати знаннями та практичними навиками фахівця з автоматизації. У той же час для ефективної та економічної роботи сучасного електроприводу потрібно створювати такі режими роботи, які дають можливість заощаджувати електроенергію, збільшувати коефіцієнт використання електрообладнання, а вирішення такої задачі неможливо без глибокого розуміння електромеханічних процесів.
На сучасному рівні застосування цифрової техніки як в електроприводах, так і в системах автоматизації надійно і надовго зайняло пануюче місце. Це обумовлює необхідність: засвоєння хоча б однієї з мов програмування (programming) базових управляючих елементів систем автоматизації та електроприводів, що дозволятиме реалізовувати бажані проекти на виробництві; оволодіння методиками налаштування прикладних функцій сучасних електроприводів; опанування прийомів розробки людино-машинного інтерфейсу (human-machine interface). Такий багатогранний досвід потрібен не тільки на виробництві під час екплуатації електроприводів та систем автоматизації, він необхідний при розробці та проектуванні, при монтажних роботах та наладці устаткування.
5
Лабораторна робота № 1
ОСНОВИ РОБОТИ З ПРОГРАМОВАНИМ ЛОГІЧНИМ КОНТРОЛЕРОМ
TWIDO
Мета роботи |
|
Опанувати основи програмування |
контролерів |
|
|
|
мовами |
списку інструкцій LI та |
сходинкових |
|
|
діаграм |
LD, засвоїти основні прийоми розробки |
|
|
|
програм з функціональними блоками |
|
|
1.1 Програма виконання лабораторної роботи
1.Ознайомтесь з призначенням, функціональними можливостями програмованих логічних контролерів Twido [4], а також з методикою формування апаратної частини проекту в середовищі розробки TwidoSuite.
2.Використовуючи браузер проекту середовища TwidoSuite та менеджер допомоги, ознайомитись з набором функціональних блоків (таймерів, лічильників, барабанних контролерів та регістрів пам’яті), що використовуються при програмуванні, їх призначенням та параметрами налаштування.
3.За зразком, наведеним в п. 1.2 (рис. 1.1), розробити мовою сходинкових діаграм LD програму контролера, яка містить основні функціональні блоки: таймер, лічильник, компаратор, барабанний контролер, регістр пам’яті.
4.Перевірити роботу розробленої програми, використовуючи режим симуляції проекту, після перевірки зберегти проект.
5.Створити новий проект з такою ж апаратною частиною, як і в попередньому випадку.
6.За зразком, наведеним в п. 1.2 (рис. 1.2), мовою списку інструкцій LI програму програмованого логічного контролера (ПЛК), яка містить основні функціональні блоки: таймер, лічильник, компаратор, барабанний контролер, регістр пам’яті.
7.Перевірити роботу розробленої програми, використовуючи режим симуляції проекту, після перевірки зберегти проект.
8.Передати програму будь-якого з проектів з ПК в контролер. Перевірити її виконання, використовуючи імітатор сигналів та вікно моніторингу.
2.2Методичні вказівки до виконання лабораторної роботи
1.Запустити програму TwidoSuite та вибрати режим програмування
Programming mode.
2.Створити новий проект з зазначенням прізвища, групи та номеру лабораторної роботи.
6
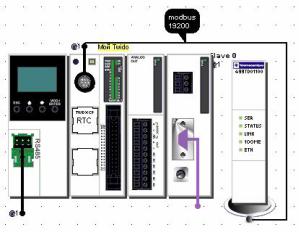
3. Відкрити вкладу опису апаратної частини проекту Describe та за допомогою каталогу вибрати наступну конфігурацію проекту:
базовий контролер: модульний TWDLMDA20DTK (12 входів, 8 транзисторних n-p-n виходів);
модуль розширення аналогових виходів TWDAVO2HT (–10-0-10 В);
модуль розширення комунікаційний CANopen Master TWDNCO1M;
адаптер послідовного інтерфейсу TWDNAC485T;
картридж годиннику реального часу TWDXCPRTC;
дисплей оператора TWDXCPODM;
мережевий пристрій Modbus / Ethernet 499TD01100.
Рисунок 1.1 – Апаратна частина проекту
4. Встановити параметри налаштування мережевого пристрою:
ІР-адреса: 10.5.4.215, маска 255.255.0.0, шлюз 10.5.4.1.
Конфігурацію протоколу порта 1 контролера змінити з віддаленого з’єднання на Modbus з адресою 1.
5.Перейти на вкладу програмування Program і задати в таблиці входів Tables of inputs вхід %I0.1 відповідальним за пуск/зупинку програми (Run/Stop? ).
6.Перейти на допоміжну вкладку Program (в правому верхньому кутку вікна).
7.Перейти з середовища редагування програми Edit Program в середовище визначення символів програми Define Symbols, де створити таблицю символьних позначень операндів програми (табл. 1.1).
8.Повернутись в режим редагування програми Edit Program та вставити першу секцію програми, натиснувши на клавішу Add a section
 .
.
7
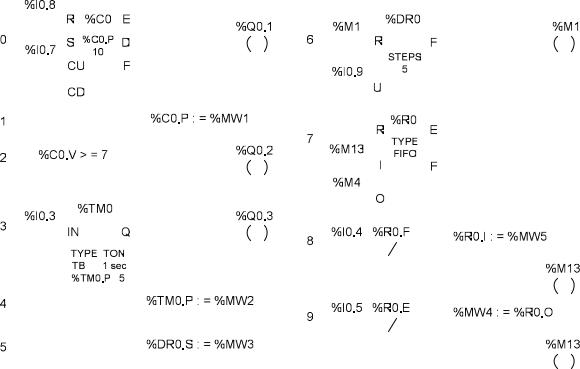
Скласти програму мовою LD для дослідження основних функціональних об’єктів контролера Twido за зразком, наведеним на рис. 1.2.
Таблиця 1.1 – Таблиця символів програми
Адреса / |
|
|
|
Символ / |
|
|
|
|
|
|
Коментар / |
||||||||||||||||
Address |
|
|
|
Symbol |
|
|
|
|
|
|
Comment |
||||||||||||||||
%Q0.2 |
COUNTER_COMPARATOR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%Q0.1 |
COUNTER_OUT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%MW1 |
COUNT_PRESET |
from 1 to 10 |
|||||||||||||||||||||||||
%I0.8 |
COUNT_RESET |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%I0.7 |
COUNT_UP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%Q0.4 |
DRUM_1_STEP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%Q0.5 |
DRUM_2_STEP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%Q0.6 |
DRUM_3_STEP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%MW3 |
DRUM_STEP |
from 0 to 3 |
|||||||||||||||||||||||||
%I0.9 |
DRUM_STEP_IN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%MW5 |
REGISTER_INPUT |
written value register |
|||||||||||||||||||||||||
%MW4 |
REGISTER_OUTPUT |
read value register |
|||||||||||||||||||||||||
%M4 |
REGISTER_READ_COMM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%M13 |
REGISTER_WRITE_COMM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%I0.3 |
TIMER_IN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%Q0.3 |
TIMER_OUT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
%MW2 |
TIMER_PRESET |
from 1 to 5 base |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1.2 – Зразок програми мовою LD
8
Для конфігурації функціональних блоків (таймера, лічильника, барабанного контролеру та регістру) після їх використання в полі програми потрібно зробити подвійний клік на зображенню відповідного блока або перейти з вкладки програмування Edit Program на вкладку
Configure / Configure the data / Function blocks.
Параметри функціональних блоків потрібно встановити наступні:
– лічильник %С0:
Preset (уставка) – 10, Adjustable (доступ до переналаштування) – ;
– таймер %ТМ0:
Type TON (затримка на вмикання), Base (одиниця затримки) – 1 s, Preset (уставка) – 10, Adjustable (доступ до переналаштування) – ;
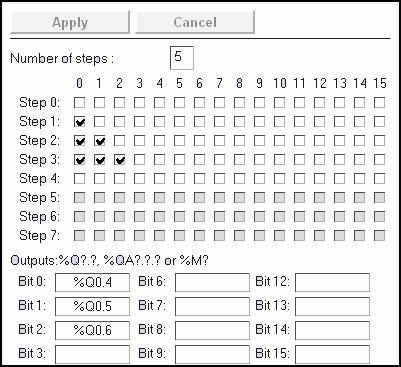
– барабанний контролер %DR0 – налаштовується відповідно до рис. 1.3.
Рисунок 1.3 – Параметри налаштування барабанного контролера %DR
Барабанний контролер функціонує відповідно до таблиці налаштування: по горизонталі вказуються біти, які будуть активовані на відповідному крокові, а по вертикалі вказуються номери кроків. В нижній частині вікна присвоюються операнди програми відповідним бітам барабану. Так, в наведеному прикладі на сходинці 1 (Step 1) буде активним вихід ПЛК %Q0.4, на сходинці 2 (Step 2) будуть активними виходи ПЛК %Q0.4 та %Q0.5, а на сходинці 3 (Step 3) – виходи ПЛК
%Q0.4, %Q0.5 та %Q0.6.
– регістр %R0:
9
тип FIFO (First In First Out) – регістр запам’ятовування/зчитування параметру, який швидко змінюється в порядку звичайної черги (перший прийшов – перший пішов). Після перевірки роботи програми змініть тип регістру на LIFO (Last In First Out) – така організація запису/зчитування відповідає порядку зарядки магазину автматичної зброї – останній заряджений патрон вистрілює першим, тобто останнє записане значення в регістр буде зчитано з виходу першим. Значення записуються через вхід регістру %R0.I по передньому фронту сигналу на командному вході І, а зчитуються з виходу регістру %R0.O по передньому фронту сигналу на командному вході О. Всього в один регістр можна здійснити 16 записів, після чого активується його вихід F (full – повний), коли регістр пустий, то активний вихід Е (empty – пустий).
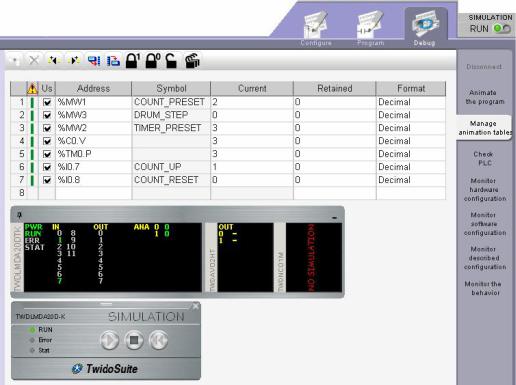
9. Зберегти проект та перевірити його роботу, використовуючи режим симуляції (доступ з нижньої панелі інструментів – кнопка «S»). У вікні симуляції (рис. 1.4) для запуску програми слід активувати вхід %I0.1 (він підсвічується зеленим кольором), а потім перевірити виконання програми шляхом використання анімаційної таблиці. Приклад створення анімаційної таблиці наведено на рис. 1.4. Порядок її створення доволі простий – в комірці Address вводиться адреса потрібної змінної, комірка Symbol заповнюється автоматично, відповідно до таблиці символів (табл. 1.1), в комірці Current відображується поточне значення змінної програми, ця комірка доступна також для запису.
Рисунок 1.4 – Перевірка роботи проектув режимі симуляції
10