

ASUTP_Literatura / Posobie_ASK_TP_LPZ
.pdfЛабораторна робота № 5
РОЗРОБКА ГРАФІЧНОГО ЛЮДИНО-МАШИННОГО ІНТЕРФЕЙСУ СИСТЕМ КЕРУВАННЯ ОБ’ЄКТАМИ З РЕГУЛЬОВАНИМ ЕЛЕКТРОПРИВОДОМ НА БАЗІ ПАНЕЛІ ОПЕРАТОРА XBT GT2130
Мета роботи Навчитися розробляти графічний людиномашинний інтерфейс для віддаленого керування регульованими електроприводами, опанувати методику розробки проектів в середовищі Vijeo Designer
5.1 Програма виконання лабораторної роботи
1.Ознайомтесь з призначенням, концепцією роботи, технічними характеристиками та підтримуваними інтерфейсами ператорської панелі
(ОП) XBT GT2130 [15, c. 11-55].
2.Ознайомтесь з доступними функціями ОП XBT GT2130 в середовищі розробки Vijeo Designer (розділ Help). Зверніть увагу на послідовність створення та редагування таблиці числових та дискретних змінних проекту, налаштування числових полів та графічних елементів для вводу/відображення змінних, послідовність створення нових сторінок в проекті та налаштування переходів між ними.
3.Розробіть проект людино-машинного інтерфейсу (ЛМІ) з однією сторінкою користувача та однією сторінкою тривоги. Сторінка користувача повинна забезпечувати управління та моніторинг стану перетворювача частоти Altivar 71. В сторінці користувача передбачити:
пуск, зупинку та зміну напрямку обертання електроприводу,
введення заданої швидкості,
зміну навантаження через аналоговий канал ПЛК та навантажувальний генератор електродвигуна з широтноімпульсним перетворювачем;
контроль фактичної швидкості, струму та моменту електроприводу. Завдання швидкості та навантаження здійснювати через цифрову
клавіатуру з автоматичним викликом.
Для контролю швидкості та моменту використати цифрову індикацію та індикацію зі шкалою. Для контролю струму використати лише цифрову індикацію. В полі основної сторінки розташувати тренд значень швидкості та моменту електроприводу в одній координатній площині. Сторінка тривоги повинна викликатися автоматично при обриві зв’язку з перетворювачем частоти і містити в собі відповідне повідомлення по обрив зв’язку.
4. Відкрийте проект програми ПЛК, розроблений для віддаленого керування перетворювачем частоти з використанням шини CANopen (ПР
41
№ 7). За зразком роботи № 9 внесіть зміни в існуючу програму для виклику сторінки тривоги при відповідному значенні слова статусу ПЧ.
5.Завантажте розроблений проект в ПЛК.
6.Перед завантаженням проекту в ОП виконайте його перевірку та відлагодження з використанням режиму симуляції. Завантажте проект ЛМІ
вОП.
7.Перевірте з’єднання модуля CANopen Master ПЛК Twido з перетворювачем частоти за допомогою мережевих кабелів та відповідних роз’ємів. Складіть структурну схему розробленої системи керування, наведіть мережеві адреси усіх пристроїв та задіяних протоколів в роботі. Перевірте налаштування ПЧ для роботи з мережею CANopen за відповідною адресою.
8.Перевірте з’єднання комунікаційного порту ОП з додатковим портом ПЛК. Запустіть програму в ПЛК на виконання, увімкніть перетворювач частоти.
9.Проведіть пуск, зупинку та реверс електроприводу за допомогою ОП. Змініть швидкість обертання електроприводу. Перевірте значення швидкості обертання, струму та моменту при зміні завдання. Відключіть під час роботи системи перетворювач частоти від живлення та перевірте появу сторінки тривоги на ОП. Перегляньте збережені в трендах отримані раніше значення струму та швидкості електроприводу. Змінюючи навантаження, перевірте роботу ПЧ з різними законами управління для кількох заданих швидкостей (від 200 до 800 об/хв).
10.Зробіть висновки по роботі, вказавши область застосування розробленої системи, її відмінності від попередніх.
5.2Методичні вказівки до виконання лабораторної роботи
1.Розглянемо детально процес створення проекту ЛМІ на ОП XBT GT2130. Для створення проекту потрібно використати програмне середовище Vijeo Designer. Після запуску середовища, вибору дії створення нового проекту (Create new Project), зберігаємо проект під іменем ATV_71_control та вибираємо тип проекту з однією панеллю, як наведено на рис. 5.1, тут же можна вказати коментарі, дані про автора проекту для полегшення роботи з документацією.
В наступному вікні вибирається тип ОП, яка відповідає наявній апаратній конфігурації всієї системи керування: тип панелі XBT GT2130 з серії XBT GT2000. Даний етап відображений на рис. 5.2.
Для завантаження проекту в ОП використовується Ethernet інтерфейс, тобто ОП підключається мережевим кабелем в комп’ютерну мережу і повинна мати власний ідентифікатор: IP-адресу та супровідні налаштування. Налаштуйте мережеві параметри ОП таким чином, як наведено на рис. 5.3.
42

Рисунок 5.1 – Вікно збереження та основних даних проекту ЛМІ
Рисунок 5.2 – Вибір типу панелі в середовищі Vijeo Designer
Додайте до списку підпорядкованого ОП обладнання ПЛК Twido, який з’єднуватиметься з ОП за допомогою інтерфейсу Modbus RTU. Етап додавання обладнання до проекту наведено на рис. 5.4.
43
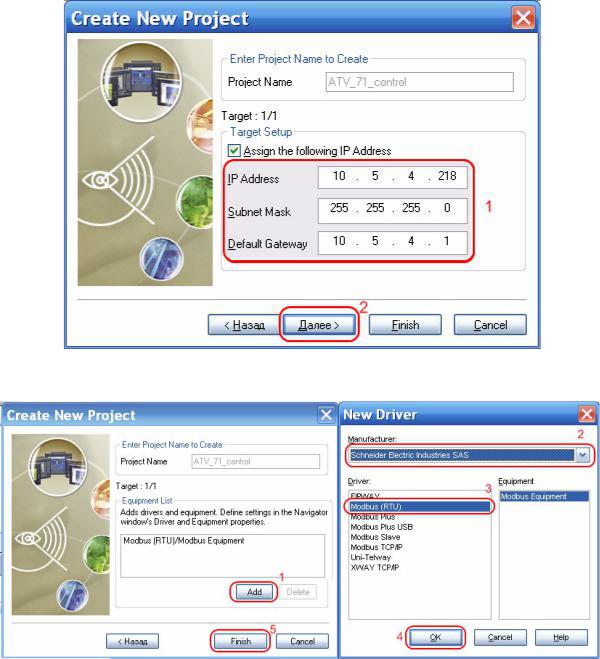
Рисунок 5.3 – Зразок налаштування мережевої адреси операторської панелі
Рисунок 5.4 – Вікно вибору підпорядкованого обладнання до проекту
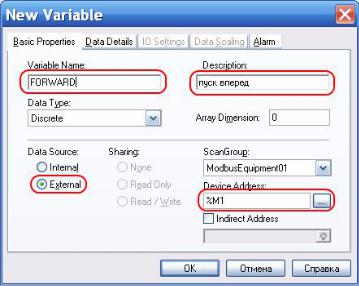
Додатково потрібно налаштувати комунікаційний порт зв’язку панелі з ПЛК. Через боковий браузер Vijeo Designer виберіть вкладку
IO Manager / ModbusRTU01 / Configuration та налаштуйте його відповідно до зразку на рис. 5.5.
44
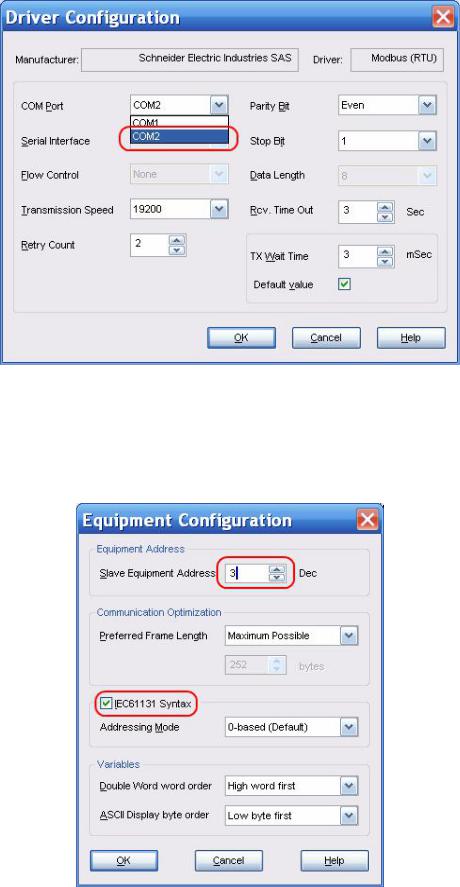
Рисунок 5.5 – Вікно налаштування комунікаційного порту панелі
Після цього в браузері Vijeo Designer виберіть вкладку IO Manager / ModbusRTU01 / ModbusEquipment01 / Configuration та налаштуйте його відповідно до зразку на рис. 5.6.
Рисунок 5.6 – Вікно налаштування підпорядкованого обладнання панелі
45
На цьому перший етап підготовки людино-машинного інтерфейсу завершений, після якого переходять до формування таблиці змінних проекту.
Змінні, які в ПР № 7 використовувались для завдання режиму роботи ПЧ та моніторингу за його станом наступні:
Таблиця 5.1 – Об’єкти програми керування ПЧ за допомогою ПЛК
Об’єкт |
Символьне |
Коментар |
|
програми |
позначення |
||
|
|||
%M1 |
FORWARD |
пуск вперед (імпульсна команда) |
|
%M2 |
REVERSE |
пуск назад (імпульсна команда) |
|
%M3 |
STOP |
зупинка (імпульсна команда) |
|
%MW1 |
SPEED_REF |
завдання швидкості |
|
%MW2 |
SPEED_ACT |
фактичне значення швидкості |
|
%MW3 |
CURRENT_ACT |
фактичне значення струму (0,1 А) |
|
%MW4 |
TORQUE_ACT |
фактичне значення моменту (% Мном) |
Фактично ці ж змінні слід використати при формуванні таблиці змінних проекту ЛМІ, але їх потрібно доповнити: слід додати біт (наприклад, %M4), який буде відповідати за втрату зв’язку з ПЧ по CANopen, а також слово (наприклад, %MW5) формування навантаження через аналоговий вихідний канал ПЛК і навантажувальний генератор електродвигуна з широтно-імпульсним перетворювачем. Додавання змінних в таблицю створюється шляхом виконання команди з панелі задач Variable / New Variable… або за допомогою бокового браузера проекту. На рис. 5.7 наведено приклад додавання дискретної змінної пуску вперед електроприводу %M1.
Рисунок 5.7 – Вікно додавання нової змінної в проект ЛМІ
46

На рис. 5.8 наведено зразок заповненої таблиці змінних проекту.
Рисунок 5.8 – Таблиця змінних проекту ЛМІ
Зверніть увагу, що одна з дискретних змінних в таблиці (Comm_fault – %M4) відноситься до групи тривог (алармів) AlarmGroup1, тобто при її встановленні в лог. 1 на екрані терміналу буде активною сторінка тривоги про втрату зв’язку з перетворювачем частоти згідно з п. 3 програми роботи.
Крім цього для відображення трендів швидкості обертання електроприводу та моменту електродвигуна потрібно поточні значення заносити в пам’ять ОП для їх реєстрації, тому необхідно змінні, призначені для реєстрації (SPEED_ACT – %MW2 та TORQUE_ACT –%MW4) віднести до групи логів LoggingGroup01.
Надалі з бокового браузера проекту виберіть вкладку властивостей групи логів Data Logging / LoggingGroup01 / Settings / Variable storage і
налаштуйте доступну пам’ять для реєстрації змінних, а також швидкість та плавність відображення тренду за прикладом на рис. 5.9.
При налаштуванні цілочисельних змінних, значення яких повинні вводитись за допомогою ОП і передаватись по мережі до ПЛК – змінні завдання по швидкості та навантаженню (SPEED_REF та LOAD_REF) – потрібно обмежити їх граничні значення, що будуть адекватиними для електроприводу: завдання по швидкості – від 0 до 2000 об/хв, а завдання по навантаженню – від 0 до 100 %. Обмеження значень встановлюється у вікні налаштування відповідної змінної у вкладці Data Details / Input range (див. зразок на рис. 5.10).
47
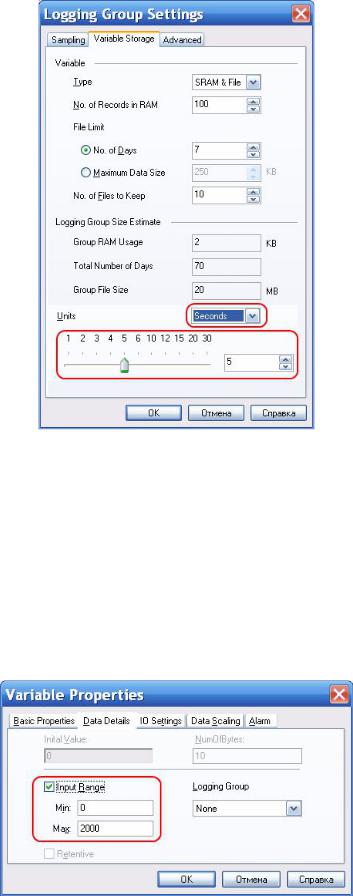
Рисунок 5.9 – Параметри налаштування групи логів для побудови трендів
Наступним етапом є створення графічного інтерфейсу проекту. Для побудови основної сторінки потрібно використати кілька об’єктів:
кнопка (вперед, назад, стоп);
цифрова панель (завдання швидкості, навантаження та контроль струму);
графічний елемент з стрілковим показчиком (відображення поточних значень швидкості та моменту);
графічний елемент тренду (реєстрація значень швидкості та моменту).
Рисунок 5.10 – Параметри налаштування змінної, доступної для запису
48
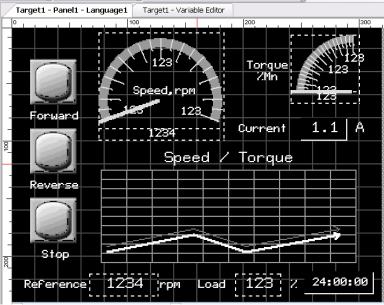
Вказані елементи потрібно розташувати на робочому полі панелі з врахуванням функціональності, ергономічних міркувань (зручності та естетичності). Доступ до цих елементів здійснюється з панелі інструментів. Один з варіантів графічного інтерфейсу наведено на рис. 5.11. При побудові використовуйте текстові підписи під елементами для пояснення їх призначення.
Рисунок 5.11 – Приклад розташування графічних елементів на панелі
Після побудови інтерфейсу у властивостях графічних елементів прив’яжіть їх до змінних з таблиці. Розглянемо, наприклад, налаштування графічного елементу з стрілковим показчиком для відображення змінної фактичної швидкості SPEED_ACT. Додаємо до вмісту панелі графічний елемент типу Meter  з панелі інструментів проекту та відкриваємо вікно для його налаштування (рис. 5.12).
з панелі інструментів проекту та відкриваємо вікно для його налаштування (рис. 5.12).
Для відображення біля шкали числового значення параметру слід перейти у вікні властивостей (рис. 5.12) на вкладку Numeric Display та поставити позначку Enable, налаштувати формат числа та розмір шрифта.
Використовуйте графічний елемент Data Display  з панелі інструментів для відображення числового значення струму електродвигуна та введення заданих значень швидкості та навантаження.
з панелі інструментів для відображення числового значення струму електродвигуна та введення заданих значень швидкості та навантаження.
Фактичне значення струму двигуна передається у вигляді цілого числа в кратності 0,1 А, тому для коректного відображення струму в полі елементу Data Display слід вибрати не просто змінну CURRENT_ACT (%MW3), а записати математичний вираз CURRENT_ACT / 10.
49
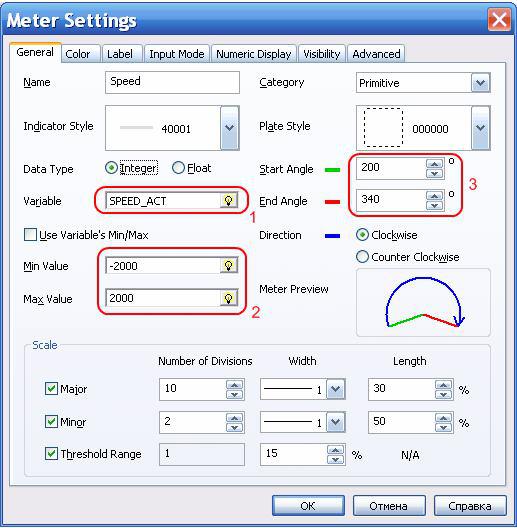
Рисунок 5.12 – Налаштування графічного елементу для відображення за шкалою
Для введення даних через вказаний графічний елемент потрібно встановити позначку Enable у вкладці Input Mode та позначку Display Popup Keypad – тоді при натисненні на графічний елемент на екрані панелі відображуватиметься клавіатура для набору числа.
Налаштуйте повідомлення тривоги про втрату зв’язку з ПЧ по мережі CANopen, перейшовши в браузері проекту до групи алармів AlarmGroup1, як наведено на рис. 5.13.
Збережіть проект і перевірте його роботу за допомогою симуляції. Перед перевіркою проекту необхідно виконати послідовно ряд команд з панелі задач:
а) Build / Validate Target – перевірка коректності зв’язків між змінними та графічними елементами, розташування елементів в полі панелі і ін.
б) Build / Build Target – компіляція проекту перед завантаженням в панель та симуляцією (необхідно для використання його в середовищі HMI Runtime).
50