fm |
|
f |
0 |
, |
(6.20) |
|
|
|
|
|
|
|
|
N |
x s |
K |
s |
|
|
|
|
|
де Ks , Kr – коефіцієнти подільника частоти у вимірювальних каналах частоти мережі та кутової швидкості відповідно; N x r , Nx s - кількість імпуль-
сів у вимірювальних каналах частоти мережі та кутової швидкості відповідно.
Враховуючи, що r 2 fr , із рівнянь (6.18) – (6.20) отримаємо рівняння перетворення мікропроцесорного вимірювача ковзання:
Алгоритм роботи мікропроцесорного вимірювача ковзання наведено на рис. 6.17.
Початок
Вимірювання кутової швидкості
Вимірювання частоти мережі живлення
S 1 |
N |
x s |
K |
s |
|
|
|
|
N |
|
|
K |
|
z |
|
x r |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
Кінець
Рисунок 6.17 – Алгоритм роботи мікропроцесорного вимірювача ковзання
6.7 Мікропроцесорний вимірювач моменту інерції
В даному параграфі розглядається метод визначення моменту інерції,
який використовує зразкові моменти інерції |
J1 , J 2 |
та обмежений діапазон |
кутових швидкостей обертання в режимі самогальмування електричної машини, в якому момент опору M 0 лінійно залежить від кутової швидкос-
ті r :
де а – тангенс кута нахилу характеристики опору.
Тоді рівняння руху електричної машини відповідно з першим і другим зразковими моментами інерції в процесах самогальмування мають вигляд
де n |
– номінальна кутова швидкість обертання; |
ричної машини; t – час.
Після логарифмування рівнянь (6.23)
і виключення складової нту інерції запишеться
з рівнянь (6.24) рівняння для визначення моме-
J |
|
ln |
|
r 2 |
(t) |
|
J |
|
ln |
|
r1 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
2 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ln |
|
r1 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r 2 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
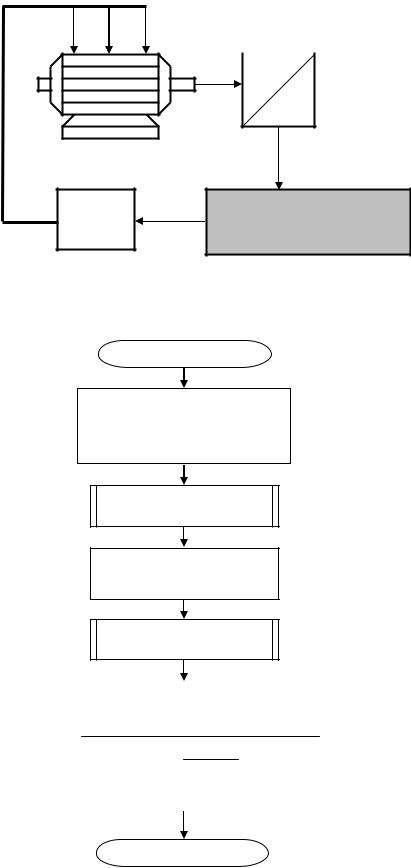
Структурна схема для реалізації запропонованого способу вимірювання моменту інерції наведена на рисунку 6.18. Мікропроцесорна система MCU проводить вимірювання кутової швидкості r і за допомогою таймера обчислює час t, який необхідний для визначення моменту інерції.
Рисунок 6.18 – Структурна схема мікропроцесорного вимірювача моменту інерції
Початок
З’єднати ротор електричної машини
із зразковим моментом інерції
Вимірювання кутової швидкості
З’єднати ротор електричної машини
із зразковим моментом інерції
Вимірювання кутової швидкості
J |
|
ln |
|
r 2 |
(t) |
|
J |
ln |
|
r1 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ln |
|
r1 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r 2 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кінець
Рисунок 6.19 – Алгоритм роботи мікропроцесорного вимірювача моменту інерції
6.8 Мікропроцесорний вимірювач пускового моменту
Залежність пускового моменту |
M п |
від кута повороту ротора |
|
досить важливим параметром, який значною мірою визначає якість пускових характеристик електричної машини.
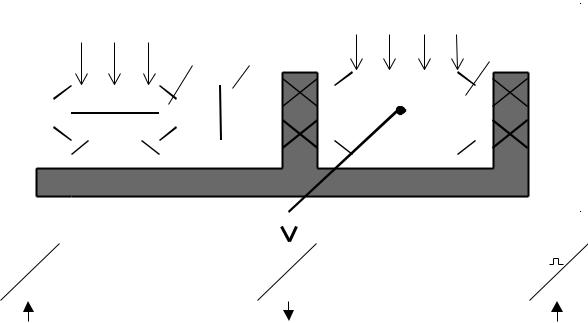
Структурна схема засобу вимірювання залежності M п наведена
на рис. 6.20.
Зовнішній приводний двигун ПД із невеликою наперед заданою швидкістю обертає ротор електричної машини ЕМ. Одночасно вимірюється момент на його роторі та кутове положення ротора протягом одного повного оберту ротора ЕМ. Швидкість обертання ротора ЕМ має бути такою, щоб за час вимірювання залежності M п температура обмоток статора
ЕМ не перевищила розрахункове робоче значення.
Пристрій містить основу, приводний двигун ПД, вихідний вал якого встановлено на підшипниках, сенсор зусилля, що встановлено на основі перетворювача і з’єднано зі статором приводного двигуна вимірювальним важелем, пускові пристрої приводного двигуна і ЕМ, мікропроцесорну систему MCU.
Вимірювальний перетворювач
UA UB UC ЕМ МС |
UА UВ UС |
0 |
ПД |
|
|
M С U
Рисунок 6.20 – Структурна схема засобу вимірювання залежності M п (а)
Вимірювання здійснюють у відповідності з таким алгоритмом. ЕМ встановлюють на основі вимірювального перетворювача жорстко і його ротор за допомогою муфти спряження МС з’єднують із вихідним валом
приводного двигуна, а живлення ЕМ і ПД відбувається від електричної мережі за допомогою пускових пристроїв.
Перед вмиканням приводного двигуна і ЕМ до електричної мережі в оперативній пам’яті MCU встановлюється початкова адреса і довжина буфера, в якому будуть зберігатися масиви виміряних значень моменту і кута повороту ротора. Потім MCU переходить на програму запуску ЕМ і ПД. Приводний двигун обертає через муфту МС ротор ЕМ. В результаті вимірюваний параметр M п ЕМ передається з ротора ЕМ на муфту МС і на кор-
пус приводного двигуна. При цьому на сенсор зусилля через вимірювальний важіль діє сила Qi , пропорційна M п ЕМ . Напруга U i на виході сенсора
зусилля, пропорційна Qi , через аналого-цифровий перетворювач MCU за-
писується в оперативну пам’ять. Після завершення одного повного оберту ротора ЕМ приводний двигун і ЕМ знеструмлюються, а в оперативній пам’яті MCU сформується масив виміряних значень сили Qi . Причому ад-
реса масиву виміряних значень упорядкована за кутовим положенням ротора. Після цього визначається масив результатів пускового моменту
M пi |
Qi g l , |
(6.26) |
– прискорення вільного падіння; |
l – довжина вимірювального важе- |
1.Бродин В.Б., Шагурин И.И. Микроконтроллеры. Архитектура, программирование, интерфейс. –М.:ЭКОМ, 1999.
2.Козаченко В.Ф. Микроконтроллеры: Руководство по применению 16-разрядных микроконтроллеров Intel MCS-196/296 во встроенных системах управления. –М.:ЭКОМ, 1997.
3.Современные микроконтроллеры: Архитектура, средства проектирования, примеры применения, ресурсы сети Интернет. «Телесистемы» / Под ред. И.В.Коршуна. Сост.: Пер. с англ. Б.Б.Горбунова –М.: Аким, 1998.
4.AT90S2313 Embedded Microcontroller User’s Manual. Atmel Corp.
1999.
5.Чумаченко І.В., Кошовий М.Д., Лопатин В.В. Мікроконтролерні прилади: структура і використання: Навчальний посібник. – Харків: Нац. аерокосмічний ун-т «ХАІ», 2001. –277с.
Міністерство освіти і науки України Вінницький національний технічний університет
225
В.О. Поджаренко, В.Ю. Кучерук, В.М. Севастьянов
Основи мікропроцесорної техніки
НАВЧАЛЬНИЙ ПОСІБНИК
|
Усі цитати, цифровий, фактичний |
Вимогам, які висуваються до нав- |
|
матеріал та бібліографічні відомо- |
чальної літератури, відповідає. |
|
сті перевірені, написання одиниць |
До друку і в світ дозволяю |
|
відповідає стандартам. |
|
на підставі § 2 п. 15 "Єдиних пра- |
|
Зауваження |
рецензентів |
вил .... " |
|
враховані. |
|
|
|
Автори: ______ В.О. Поджаренко |
Проректор з навчальної та нау- |
|
______ В.Ю. Кучерук |
ково-методичної роботи |
|
В.О. Леонтьєв |
|
|
|
______ В.М. Севастьянов
Затверджено на засіданні кафедри МПА
Протокол № ___ від __.__.200__р. Зав. кафедрою
__________ В.О. Поджаренко
Вінниця ВНТУ 2006
Навчальне видання
226
Володимир Олександрович Поджаренко
Володимир Юрійович Кучерук Володимир Миколайович Севастьянов
Основи мікропроцесорної техніки
Навчальний посібник
Оригінал-макет підготовлено авторами
Редактор О.Д. Скалоцька
Науково-методичний відділ ВНТУ Свідоцтво Держкомінформу України
серія ДК № 746 від 25.12.2001 21021, м. Вінниця, Хмельницьке шосе, 95, ВНТУ
Підписано до друку |
|
Формат 29,7х421/4 |
Гарнітура Times New Roman |
|
Папір офсетний |
Друк різографічний |
Ум. друк. арк. |
Тираж ______ прим. |
|
Зам. № |
|
Віддруковано в комп‘ютерному інформаційно-видавничому центрі Вінницького національного технічного університету
Свідоцтво Держкомінформу України серія ДК № 746 від 25.12.2001
21021, м. Вінниця, Хмельницьке шосе, 95, ВНТУ
227