

6.Вимірювання траєкторій формотворчих елементів
Метод досліджень заснований на вимірах і фіксуванні траєкторій -яких тел відомий з доісторичних часів. Єгиптяни, греки і перси спостерігали і вивчали траєкторії руху небесних тіл. У середні століття вивчалися траєкторії польоту ядра випущеного з гармати. З розвитком космонавтики отримали практичне використання розрахунки траєкторії руху космічного корабля. Стосовно до верстатобудування метод траєкторій має набагато меншу історію.
Перші траєкторії осі центру вала і вершини різця були опубліковані А.П. Соколовським [ 6 ] (рис. 6.1). Аналіз отриманих даних дозволив автору зробити висновок про те, що « вал (мається на увазі заготовка) і різець роблять коливання в напрямку осі Y майже точно на зустріч, один одному, тобто або сходяться, або розходяться». Слід зазначити, що А.П. Соколовський у своєму розпорядженні досить недосконалою вимірювальною апаратурою, що жодною мірою не применшує його наукових досягнень. Виміри проводилися за допомогою так званого кільцевого датчика, який при вимірі коливань різця утримувався в руках, а при вимірюванні коливань заготовки контактував з її обертається поверхнею. Безумовно, така методика вимірювань не може претендувати на високу точність.
Пристрій для вимірювання і запису траєкторії руху осі шпинделів точних верстатів і приладів (авторське свідоцтво СРСР 301515, автори Рагульскіс К.М., Будгінас С.-А.Ю.) представлено на рис. 5.2. Пристрій містить зразкову міру 1 круглості. Кріплення заходи до шпинделя верстата або приладу здійснюється загвинчування на нього фланця 2 з диском 3 і кільцем 4, жорстко скріпленими між собою. Регулювання кутового положення заходи здійснюється за допомогою двох гвинтів 5 поворотом заходи щодо упору 6. За допомогою плоских пружин 7 відбувається силове замикання заходи на гвинти 5 і упор.
У 1970 році була визначена траєкторія осі шатунной шийки тракторного двигуна [7,8]. У шатунной шийці колінчастого вала під кутом 90° були встановлені два датчика. Провід від датчиків з свердління в колінчастому валу виводяться до ртутного струмознімачами , який передає сигнал на нерухомі дроти. Сигнал подається на підсилювач, а потім на світлопроменевий осцилограф, на якому проводився запис показань двох датчиків. Крім того, на стрічці записувався сигнал від датчика кута повороту. Через відсутність у той час комп'ютерів подальша обробка проводилася вручну. Отримана експериментальна траєкторія осі шатунной шийки досить добре узгоджувалася з теоретичними розрахунками цієї траєкторії.
У цьому дослідженні були надані методичні основи вимірювання траєкторії осі обертового валу:
- Вимірювання проводяться в декартовій системі координат , для чого використовуються два датчика переміщення, розташовані під кутом 90°.
- Сигнал від датчиків посилюється за допомогою підсилювача і реєструється за допомогою осцилографа.
Ці основи до теперішнього часу залишаються незмінними. Змінюється тільки конструкція датчиків , апаратура , способи обробки інформації.
На рис. 5.5 представлено пристрій для вимірювання траєкторії руху осі шпинделя за авторським свідоцтвом СРСР 595080, автори: Оснач О.Т., Хільчевський Г.Л., Коргічев Е.В.
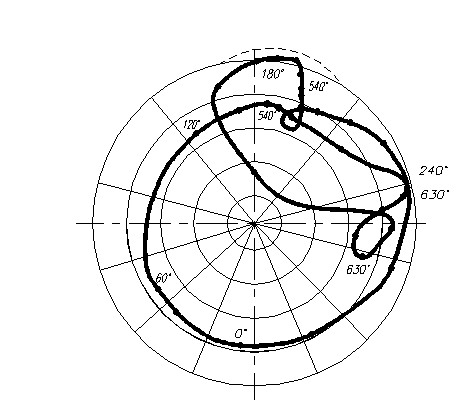
Рис.6.1. Траєкторія осі шатунной шийки тракторного двигуна СМД–14
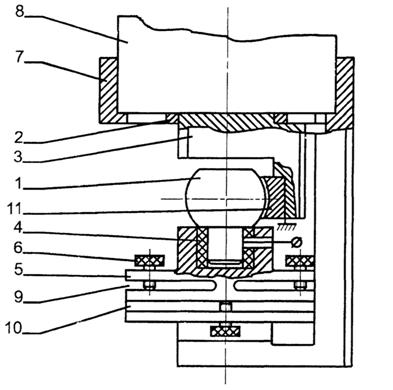
Рис. 6.2. Пристрій для вимірювання траєкторії руху осі шпинделя
Воно містить зразкову міру круглості, виконану у вигляді сфери 1, і встановлену по осі контрольованого шпинделя 2. Сфера 1 розміщена в діелектричній втулці 4, яка змонтована в пружному елементі 5, деформируемом допомогою гвинтів 6. За допомогою гвинтів 6 центрируют сферу 1 щодо контрольованого шпинделя 2. Пружний елемент 5 укріплений на кронштейні 7, який змонтований на гільзі 8 шпинделя 2. Пружний елемент 5 виконаний у вигляді сталевого корпусу з двома парами пазів 9 і 10. Ці пази прорізані так, що сфера 1, укріплена на пружному елементі 5, може переміщатися за допомогою гвинтів 6 у двох взаємно перпендикулярних площинах поперек осі шпинделя 2. Наближений до сфери 1 ділянка 11 оправлення 3, що закріплюється на шпинделі 2, виконаний у вигляді сферичної поверхні. Міра круглості 1 і ділянка 11 спільно з повітряним зазором між ними складають ємнісний перетворювач «траєкторії» осі шпинделя в електричний сигнал.
Пристрій працює таким чином. Оправлення 3 кріплять на контрольованому шпинделі 2. Кронштейн 7 жорстко кріплять на гільзі 8 шпинделя 2. Обертаючи шпиндель 2, центрують відносно нього сферу 1 за допомогою гвинтів 6, деформирующих пружний елемент 5. Потім, підключивши до пристрою реєструючий прилад, здійснюють його калібрування. Після цього роблять запис сигналу з виходу вимірювального пристрою. Пристрій записує НЕ траєкторію, а мінімальне значення зазору за оборот шпинделя, що не дає можливості визначити вихідні параметри точності.
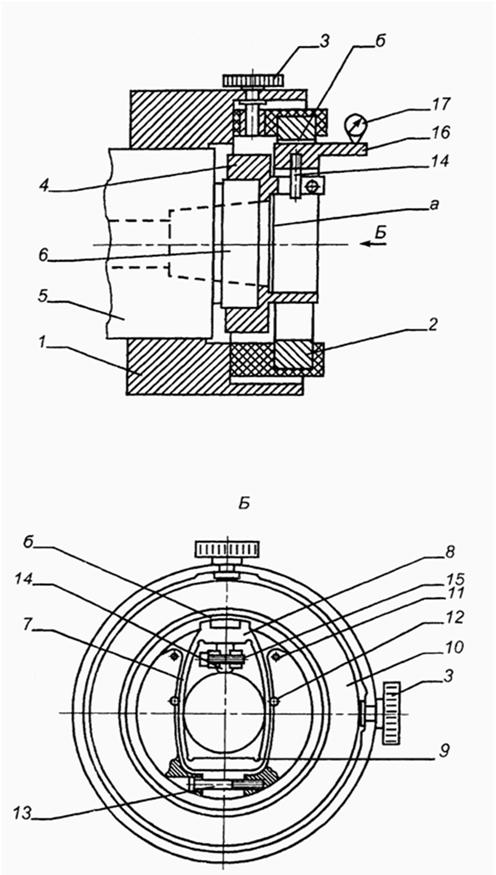
Рис. 6.3. Устройство для измерения траектории движения оси шпинделя точных станков и приборов
В [9] наведені результати записи траєкторії осі шліфувального верстата має гідростатичні опори. Як видно з рис. 5.1 траєкторія записувалася за допомогою катодного осцилографа , що дозволило провести записи високої якості. Траєкторії показують процес пуску і зупинки верстата.
Б.С. Балакшин і Б.М. Базров [10] зняли траєкторію осі шпинделя на токарно -гвинторізному верстаті 1А62 з використанням промислової апаратури (рис. 6.1).
На рис. 6.3 представлено пристрій для вимірювання траєкторії руху осі шпинделя точних верстатів і приладів за авторським свідоцтвом 513789, автори: Карельштейн І.І., Похоровскій А.Д. Воно містить корпус 1 , зразкову міру круглості - кільце 2, механізм 3 настановних переміщень, оправлення 4 і прилад. Корпус 1 пристрою закріплений на гільзі 5 контрольованого шпиндельного вузла. Механізм настановних переміщень служить для центрування кільця 2 щодо контрольованого шпинделя 6. Оправка 4 жорстко закріплена на контрольованому шпинделі 6 таким чином, щоб це кріплення не перешкоджало нормальному з'єднанню шпинделя з інструментом.
Частина оправлення 4, що входить в отвір кільця 2, відокремлена від решти тіла оправки прорізом а й вирізаними фрезеруванням таким чином, що являє собою консольний елемент з дугоподібними бічними сторонами 7 і поперечиною 8. Зовнішня поверхня перекладини утворює з кільцем 2 робочий зазор б.
У місцях переходу від поперечини 8 до сторін 7 і від останніх до не підрізає тілу оправлення виконані зрізи 9.
Паралельно дугоподібним сторонам 7 розташовані важелі 10 з осями 11, навколо яких вони можуть повертатися, натискаючи роликом 12 на середини сторін 7 елементу. Вільний кінець важелів 10 стягнутий гвинтом 13. В перекладині 8 закріплений стрижень 14, який може фіксуватися щодо оправлення 4 клемними затискачами 15, губки яких складають одне ціле з тілом оправки.
Пристрій працює таким чином. Корпус 1 пристрою жорстко кріплять до гільзи 5 шпиндельного вузла, а оправлення 4 - до кінця контрольованого шпинделя 6. Включивши обертання шпинделя, центрують відносно нього кільце 2. Підключивши до пристрою реєструючий прилад, встановлюють відповідний параметрам приладу зазор б між зовнішньою поверхнею поперечини 8 і еталонним кільцем. Для цього обертанням гвинта 13 зближують або розводять важелі 10 і відповідно ролики 12.
При цьому змінюється прогин дугоподібних сторін 7, завдяки чому перекладина 8 переміщається в радіальному напрямку. Зрізи 9 полегшують поворот кінцевих перетинів дугоподібних сторін 7. Для тарировки пристрої вводять в контакт з виступом 16 індикатор 17, переміщають вищеописаним способом поперечину 8 на певну величину і ставлять відповідно показаннями реєструючого приладу показання індикатора 17. Закінчивши операцію, стрижень 14 фіксують затискачем 15.