

DM_1 / Деталі машин КЛ [Стадник В. А
.].pdfОсновним розрахунковим навантаженням є крутний T і згинальний M моменти. Вплив стискаючих або розтягуючих сил звичайно малий і в розрахунках не враховується.
16.4. Попередній розрахунок валів.
Вибір допустимих напружень на кручення. На цьому етапі розрахунку визначають діаметр вала у його перерізах за умовою міцності на кручення. Оскільки відстань між опорами невідома, а отже, неможливо визначити момент згину, допустимі дотичні напруження вибирають заниженими, що в деякій мірі дозволяє компенсувати невраховані навантаження згину.
Виходячи з умов роботи вала та деяких вимог, що ставлять до конструкції вала, за табл. Д3 [17] вибирають матеріал для його виготовлення і орієнтовно визначають діаметр вала у характерних його перерізах за умовою міцності на кручення
|
T × 10 3 |
[ ] |
|
|
|||
τ = |
|
|
|
£ τ |
(16.2) |
||
W p |
|||||||
|
|
|
|
||||
Беручи полярний момент |
опору перерізу |
W p » 0 ,2 × d3 , в якому діє |
|||||
крутний момент T , Нм, із умови (16.2) визначають потрібний діаметр вала, мм |
|||||||
|
|
|
|
|
|
|
|
d ³ 10 × 3 |
|
T |
|
(16.3) |
|||
|
|
|
|||||
0 ,2 × [τ ] |
|||||||
|
|
|
|
||||
Діаметр вала за умовою (16.2) визначають для його перерізів, у яких діє тільки крутний момент, до того ж у цьому випадку для сталевих валів допустиме напруження беруть [τ] = (35…40) Мпа, [1].
У деяких випадках, наприклад, у конструкції проміжного вала зубчастого редуктора немає перерізів, що зазнають тільки деформації кручення. Між опорами вал зазнає згин у всіх його перерізах, а ділянка вала між зубчастими колесами додатково скручується. Тут також діаметр d під зубчастим колесом попередньо можна визначити з умови міцності на кручення (формула 16.3),
беручи заздалегідь занижене допустиме напруження [τ] = (25…30) МПа, [1].
370
Визначення геометричних параметрів ступенів валів. Одержане значення d округлюють до найближчого більшого розміру із чисел ряду Ra 40 (див табл. Д4 [17]). За вибраним значенням d з урахуванням зручності складання і фіксації деталей в осьовому напряму призначають решту стандартних посадкових діаметрів вала. Рекомендується приймати таку різницю діаметрів ступенів вала, щоб при складанні можна було насадити деталь, не виймаючи шпонку, установлену в пазу меншого діаметра.
Діаметри вала під підшипники кочення приймають у відповідності зі стандартними діаметрами dп їх внутрішніх кілець, які закінчуються на число 0
або 5. Якщо вихідний кінець ведучого вала з'єднується з валом електродвигуна діаметром de , то рекомендується приймати d =(0,8…1,0) de .
Довжина вала і осі має бути якнайменшою, щоб уникнути поперечного прогинання, а також щоб вони менше піддавались скручуванню. З іншого боку, довжина вала залежить від ширини маточин коліс, підшипників, корпусів, рами і т. д.
Довжину вала та його окремих ділянок і відстань між опорами орієнтовно визначають після призначення їх діаметрів та вибору підшипників кочення на підставі ескізної компоновки машини (редуктора) або окремої ескізної компоновки вала з підшипниками і зубчастими колесами, як показано на рис. 16.1.
Попередній вибір підшипників кочення. Попередній вибір підшипників
для кожного із валів редуктора здійснюють в такій послідовності:
У відповідності з табл. 2.2 методичного посібника [17] визначають тип,
серію і схему установки. |
|
|
|
Вибирають |
типорозмір підшипників за величиною діаметра d |
||
внутрішнього кільця, рівного діаметру ступенів вала під підшипники. |
|||
Виписують |
з табл. |
15…20 [17] |
основні параметри підшипників: |
геометричні розміри - d , |
Д , В (Т , с): тут Д - діаметр зовнішнього кільця |
||
371
підшипника; В - ширина кулькових підшипників; Т і с - осьові розміри радіально-упорних роликових підшипників.
Складання розрахункової схеми і визначення розрахункових діаметрів
валів. Для розрахунку на міцність необхідно знати напруження в перерізах вала від зовнішніх навантажень (постійних і змінних), які передаються від спряжених деталей (зубчастих коліс, шківів, зірочок та ін.). Ці навантаження можуть бути визначені розрахунковим шляхом, викладеним у попередніх лекціях.
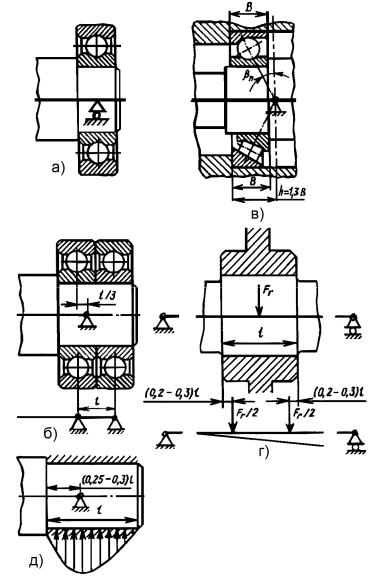
Якщо зовнішні навантаження відомі, то при розрахунковому визначенні силових факторів в перерізах вал розглядають як балку, шарнірно закріплену на двох опорах (рис. 16.12). Вибираючи тип розрахункової опори, необхідно
Рис. 16.12. До складання розрахункових схем валів
372
враховувати, що деформаційні переміщення дуже малі, і якщо конструкція дійсної опори дозволяє хоч би невеликий поворот або переміщення, то цього досить, щоб вважати її шарнірною або рухомою. На цій підставі підшипники, які сприймають тільки радіальні навантаження заміняють шарнірно-рухомими опорами, а підшипники які одночасно сприймають осьові навантаження – шарнірно-нерухомими (рис. 16.12, а і в).
Якщо в одній опорі розміщують два підшипники кочення, то умовну опору (опори) розміщають так, як показано на рис. 16.13, б.
Для валів, які опираються кінцями на підшипники ковзання, умовну опору розташовують на відстані (0,25 – 0,3)l від внутрішнього торця підшипника (рис. 16.12, д), що обумовлено зміщенням в цю сторону максимальних контактних напружень внаслідок деформації вала і підшипника.
Навантаження від зубчастих коліс, шківів, зірочок та інших подібних деталей передаються на вали через поверхні контакту. В розрахунках валів ці навантаження для спрощення замінюють зосередженими еквівалентними силами, прикладеними посередині або по краях маточини (рис. 16.12, г).
16.5. Складання розрахункової схеми і визначення розрахункових
діаметрів валів
Метою складання розрахункової схеми є:
1.Визначення радіальних реакцій в опорах підшипників.
2.Побудова епюр згинальних і крутних моментів.
3.Визначення сумарних моментів згину.
4.Визначення еквівалентних моментів.
5.Визначення розрахункових діаметрів.
6.Побудова схеми навантаження підшипників.
Розрахункові схеми валів будують після ескізної компоновки (див. рис. 16.1) редуктора, на якій з певним наближенням визначені відстані між опорами, місця розташування деталей, через які передаються на вали зовнішні навантаження.
373
Вали розглядають як балки на двох шарнірних опорах, навантажені поперечними та осьовими силами. Напруження стискання або розтягу від осьових сил звичайно незначні і при розрахунках їх не враховують.
Після побудови епюр згинальних моментів в двох взаємно перпендикулярних площинах XZ і YZ і епюри крутних моментів розраховують в характерних перерізах сумарний момент згину:
M зг = M x2 + M y2 , |
(16.4) |
Для визначення еквівалентного моменту звичайно використовують 3-ю і 4-у теорії міцності. За третьою теорією міцності еквівалентний момент
визначають за формулою: |
|
Me = M зг2 + (αT )2 , |
(16.5) |
де коефіцієнт α враховує відмінність в характеристиках напружень згину і кручення.
В реверсивній передачі напруження кручення умовно вважають знакоперемінним.
При такому допущенні обоє напружень мають однакову характеристику циклу Rσ = Rτ , а тому α =1.
В нереверсивній передачі напруження кручення носять пульсуючий від нуля характер (ττ =0). В цьому випадку:
α = |
[σ−1 ] |
, |
(16.6) |
|
[σ0 ] |
|
|
де [σ−1 ]- допустиме знакоперемінне напруження для вала;
[σ0 ] - допустиме пульсуюче від нуля напруження для вала. Допустимі величини цих напружень для валів наведені в табл. Д5 [17].
Після визначення величини M e визначають розрахункові діаметри вала
(мм) в характерних перерізах:
374

d ¢ ³ 10 |
3 |
M |
зв |
|
|
, |
(16.7) |
|
0 ,1[σ −1 |
] |
|||||||
|
|
|
|
|||||
де Мзв , Нм; [σ −1 ], МПа (табл. Д5).
Розрахункові діаметри вала округляють до величини у відповідності з
рядом Ra40 (табл. Д4 [14]).
Визначають еквівалентне напруження в небезпечному перерізі:
|
|
σ e = |
σ зг2 + 3τ 2 , |
(16.8) |
|
|||
де σ зг = |
Мзг |
і τ = |
|
T |
- відповідно напруження |
згину і кручення |
в |
|
0 ,1d 3 |
0 ,2d 3 |
|||||||
|
|
|
|
|
||||
перерізі, де Мзг |
і T в Нмм. |
|
|
|
||||
Після цього виконують |
перевірні розрахунки на |
статичну міцність |
і |
|||||
втому.
Після остаточного вибору типорозміру підшипників і виконання перевірного розрахунку вала на втому складають схему навантаження підшипників, яка буде розглянута окремо у наступних лекціях, присвячених опорам осей та валів.
Визначення реакцій в підшипниках, побудова епюр згинальних і крутних моментів
Проілюструємо щойно викладені загальні принципи визначення еквівалентного моменту Мe в небезпечних перерізах вала на прикладі розрахунку вала, зображеного на рис. 16.1. Для цього вала, враховуючи кут нахилу зубців β шестірні і напрям крутного моменту T , ліву опору заміняємо шарнірно-нерухомою, а праву – шарнірно-рухомою опорами (рис. 16.13).
Дійсні навантаження не є зосередженими, вони розподілені по довжині маточини, ширині підшипника і т. п. Як було сказано раніше, для спрощення розрахунків навантаження розглядають звичайно як зосереджені. У нашому прикладі (рис. 16.1) вал навантажений силами Ft , Fa і Fr (див. рис. 10.5), що діють в полюсі зачеплення (рис. 16.13, а) і крутним моментом T на півмуфті.
375
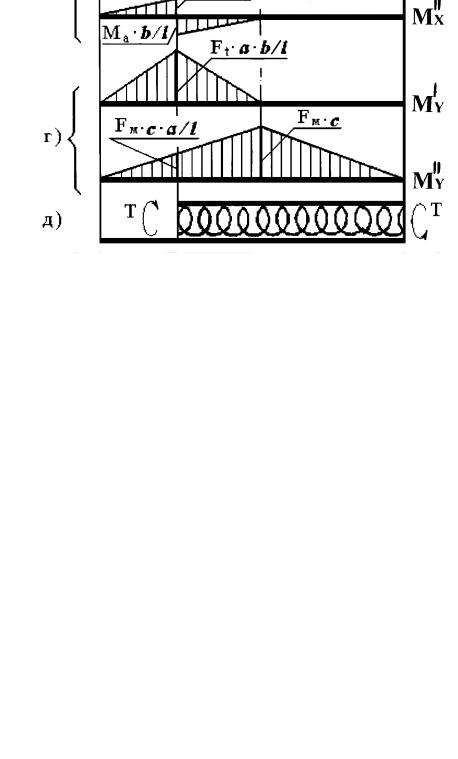
Рис. 6.13. Розрахункова схема і епюри навантаження вала:
а– загальна схема навантаження;
б– навантаження відповідно у вертикальній та горизонтальній площинах;
в– епюри згинальних моментів у горизонтальній площині;
г– епюри згинальних моментів у вертикальній площині;
д– епюра крутних моментів
376

Примітка. Якщо на вході або на виході редуктора установлені шестірня, зірочка або шків, то на відповідний вал редуктора діють ще консольні згинальні сили Fк від цих передач. При наявності цих передач консольні навантаження на вал визначаються за формулами для розрахунку сил, діючих на вали у відповідних передачах.
У нашому випадку при наявності на валу з'єднувальної муфти на вал діє незрівноважена сила FM , яка у більшості муфт є наслідком неминучої неспівосності з'єднуваних валів. У загальному випадку консольна сила від муфти FM прикладається у кінці маточини півмуфти, тобто, знаходиться у торцевій площині вихідного кінця відповідного вала, причому її значення можна знайти за формулами:
FM = K × 2T × 10 3 або
Dce
FM ≈ 125
 T , Н, для вхідних і вихідних валів одноступінчастих редукторів і
T , Н, для вхідних і вихідних валів одноступінчастих редукторів і
FM ≈ 250
 T , Н – для вихідних валів черв'ячних і багатоступінчастих редукторів, де T - Нм; Dce - діаметр розташування силових елементів, мм
T , Н – для вихідних валів черв'ячних і багатоступінчастих редукторів, де T - Нм; Dce - діаметр розташування силових елементів, мм
(розташування пальців у втулково-пальцевих муфтах, ділильний діаметр зірочок в ланцюгових муфтах, ділильний діаметр зубчастої півмуфти і т. д.).
Рекомендується приймати напрям сили від муфти протилежно коловій
силі Ft в зубчастій передачі (рис. 16.13, а).
Визначення сил в зачепленні косозубої зубчастої передачі здійснюється за одержаними нами раніше формулами (10.26, 10.27 і 10.28). При передачі
крутного момента T визначаємо: |
|
|
|
|
|
|
− |
колову силу F |
= |
2T |
; |
|
|
|
|
|
||||
|
t |
|
d |
|
|
|
|
|
|
|
|
||
− |
радіальну силу F |
= |
Ft × tgαw |
; |
||
|
||||||
|
|
r |
|
|
cos β |
|
|
|
|
|
|
|
|
|
|
|
|
|
377 |
|
−осьову силу Fa = Ft × tgβ ,
де αw - кут зачеплення (для не коригованих зубчастих передач αw =20˚); β -
кут нахилу зубців.
На рис. 6.13, б сили Ft , Fr і Fa приведені до осі вала і зображені роздільно у вертикальній YZ і горизонтальній XZ площинах. При цьому виникли пари сил T = 0 ,5Ft × d і Ma = 0 ,5Fa × d , де d - ділильні діаметри шестірні.
Визначення реакцій в підшипниках, побудова епюр згинальних і
крутних моментів здійснюється за загальними правилами, що розглядаються в курсах теоретичної механіки і опору матеріалів. При цьому епюри будуються на стиснутих волокнах перерізу вала.
Визначаємо реакції в підшипниках і будуємо епюри згинальних моментів
увзаємно перпендикулярних площинах YZ і XZ від кожної сили зокрема, а їх сумарні величини визначаємо методом арифметичного додавання в одних і тих же площинах і методом геометричного – у взаємно перпендикулярних. Такий метод значно спрощує розрахунки і запобігає помилкам, як показала практика,
утих студентів, які не досить добре засвоїли побудову епюр при вивченні дисципліни "Опір матеріалів".
Розглянувши умову рівноваги вала як балки на двох опорах ( ∑ M B =0 і
∑ M A =0) від дії кожної сили зокрема одержуємо значення реакцій в опорах від цих сил для кожної із площин зокрема:
1. Вертикальна площина YZ
|
|
|
|
¢ |
= |
Fr |
× b |
|
¢ |
= |
|
Fr × a |
|
|||||||
|
|
RAy |
|
|
|
|
|
; |
RBy |
|
|
|
|
|
; |
|
||||
|
|
|
|
l |
|
|
|
|
l |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
R |
|
² = |
Ma |
; |
|
R ² |
= - |
Ma |
; |
|
||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
Ay |
|
|
|
l |
|
|
|
By |
|
|
|
l |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Сумарні реакції у вертикальній площині: |
|
|||||||||||||||||||
R |
Ay |
= R |
Ay |
¢ + R |
|
² |
; |
R |
= |
R |
¢ + R |
². |
||||||||
|
|
|
|
|
|
Ay |
|
By |
|
|
|
By |
|
|
By |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
378 |
|
|
|
|
||
2. Горизонтальна площина XZ
|
|
|
|
|
¢ |
= |
Ft |
|
|
× b |
|
|
¢ |
= |
|
Ft × a |
|
|
|
|||
|
|
RAx |
|
|
|
|
|
; RBx |
|
|
|
; |
|
|
|
|||||||
|
|
l |
|
|
|
l |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
² |
= |
FM × c |
|
|
² |
= - |
FM |
(l + c) |
|
|||||||||||
|
RAx |
|
|
|
|
|
; RBx |
|
|
|
|
|
|
; |
|
|||||||
|
|
l |
|
|
|
|
|
|
l |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Сумарні реакції у горизонтальній площині |
|
|
|
|||||||||||||||||||
R |
Ax |
= R |
|
¢ + R |
|
|
² |
; R |
Bx |
= |
R |
¢ + R |
² |
; |
||||||||
|
|
|
Ax |
|
|
Ax |
|
|
|
Bx |
|
|
Bx |
|
||||||||
Тоді сумарні реакції в опорах А і В визначаються як геометричні суми:
|
|
|
RA = |
(RAx¢ )2 + (RAy¢ )2 |
(16.9) |
RB = |
(RBy¢ )2 + (RBy²)2 |
(16.10) |
За одержаними даними будуємо епюри згинальних і крутних моментів в двох площинах YZ і XZ, за допомогою яких можна визначити згинальний момент в будь-якому перерізі вала, наприклад у перерізі І - І
|
|
M |
|
|
|
|
|
¢ |
+ M x |
² |
2 |
|
¢ |
|
|
² 2 |
|
|
(16.11) |
||||||
|
|
зг = (M x |
|
) |
+ (M y |
+ M y |
) |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
ab |
|
|
|
a |
2 |
|
|
ab |
|
|
|
ca |
2 |
|
||||
M |
|
= |
|
F |
|
+ M |
|
|
|
|
+ F |
|
|
+ F |
|
|
|
|
|
(16.12) |
|||||
|
|
a l |
|
|
|
|
|
|
|
||||||||||||||||
|
зг |
|
|
|
r l |
|
|
|
|
|
t l |
|
|
M |
|
l |
|
|
|||||||
а еквівалентний момент згину (див. ф. 16.5)
Me = 
 M зг2 + (αТ)2
M зг2 + (αТ)2
Якщо число силових факторів, діючих на вал зменшується, наприклад при відсутності сили FM і Fa (для прямозубої передачі), то кількість епюр моментів згину у вертикальній і горизонтальній площинах відповідно зменшується до однієї в кожній площині. Тоді реакції
RA = 
 RAx2 + RAy2 ;
RAx2 + RAy2 ;
379