

ТЕМА 4. Кінем. аналіз мех
..pdfТЕМА 4. КІНЕМАТИЧНИЙ АНАЛІЗ МЕХАНІЗМІВ
4.1. Задачі
Визначити закон руху ланок механізму за його кінематичною схемою та законом руху початкової ланки.
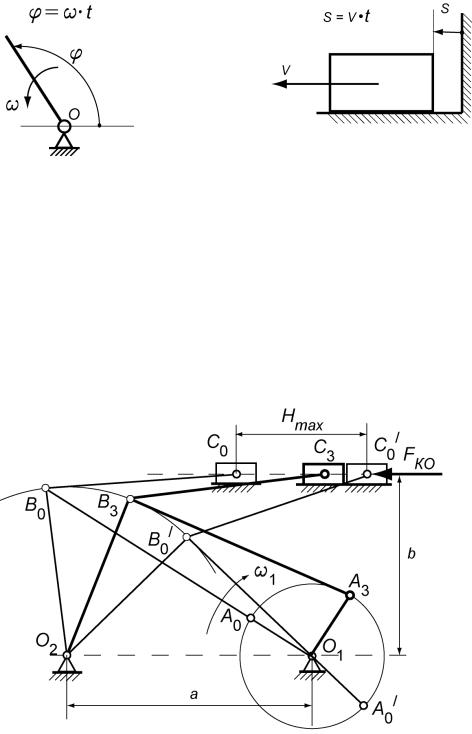
Закон руху ланок при різних видах руху визначається рівняннями:
при поступальному русі: |
|
s s t - переміщення; |
|
v v t - швидкість; |
(4.1) |
a a t - прискорення. |
|
при обертальному русі:
t - кутове переміщення;
t - кутова швидкість; |
(4.2) |
||
t |
- кутове прискорення. |
|
|
при плоскопаралельному русі: |
|
||
s s t |
і |
t ; |
|
v v t |
i |
t ; |
(4.3) |
a a t |
i |
t . |
|
4.2.Аналоги швидкостей і прискорень
4.2.1.Аналоги швидкостей
Іноді простіше і легше брати похідні не за часом, а за узагальненою координатою, а потім брати похідну за часом від функції узагальненої координати.
Відомо, що швидкість – це перша похідна за часом від
радіуса-вектора: |
|
|
|
dsi |
s |
. |
(4.4) |
dt |
i |
|
|
Аналог швидкості: |
|
|
|
dsi |
si. |
(4.5) |
|
d |
|
|
|
41
Аналогічно:
i |
|
d i |
|
- кутова швидкість. |
(4.6) |
|
dt i |
||||
d i |
|
i - аналог кутової швидкості. |
(4.7) |
||
d |
|
|
|
|
|
Аналог швидкості - це перша похідна від радіуса-вектора за узагальненою координатою, яка може бути як кутовою ( ), так
і лінійною (s).
Встановимо зв'язок між швидкістю та аналогом швидкості:
d |
d |
si |
|
||
|
|
||||
|
|
|
|
||
vi dsi |
dt |
dsi |
d d dt si . |
||
Отже,
vi si - |
(4.8) |
зв'язок між швидкістю та аналогом швидкості.
Аналогічно:
i |
i - |
(4.9) |
зв'язок між кутовою швидкістю та аналогом кутової швидкості. Мають розмірність: si [м], i [1].
4.2.2. Аналоги прискорень
Відомо, що прискорення - це друга похідна за часом від радіуса-вектора.
a |
i |
d2si |
dt2 |
|
s |
- лінійне прискорення; |
(4.10) |
|
|
|
|
i |
|
|
|||
|
|
d2si |
|
s - аналог прискорення. |
(4.11) |
|||
|
|
d 2 |
|
i |
|
|
|
|
42

За аналогією:
i |
|
d2 i |
2 i - кутове прискорення; |
(4.12) |
|
|
dt |
||||
|
|
|
|
|
|
d2 i |
d 2 |
|
- аналог кутового прискорення. |
(4.13) |
|
|
i |
|
|
||
Аналог прискорення – це друга похідна від радіуса-вектор за узагальненою координатою.
Встановимо зв'язок між прискоренням та аналогом
прискорення: |
|
|
|
|
|
ai dvi |
dt d dt si dsi dt d dt si |
|
|||
dsi d d dt si 2 si si. |
|
||||
|
ai |
2 |
si si . |
(4.14) |
|
Аналогічно: |
|
|
|
|
|
|
i |
2 |
|
|
(4.15) |
|
|
i i . |
|||
Мають розмірність: si |
[м]; |
i [1]. |
|
||
4.3. Методи кінематичного дослідження механізмів (загальна характеристика)
4.3.1.Графічні
Єнайбільш розвинутими. Позитивні якості: наочні, відносно прості. Недоліки: не завжди достатньо точні.
4.3.2.Аналітичні
Єбільш сучасними. Позитивні якості: точні. Недоліки:
громіздкі та складні без застосування ЕОМ.
4.3.3.Експеріментальні
Позитивні якості: найбільш вірогідні. Недолік: велика вартість.
43
4.4. Плани положень механізму
План положень – це зображення кінематичної схеми механізму, що відповідає певному положенню його початкової ланки. За початкову ланку, зазвичай, приймають кривошип
(рис. 4.1) або повзун (рис. 4.2)
Закон руху початкової ланки – функція положення.
Рис. 4.1. Початкова ланка - |
Рис. 4.2 Початкова ланка - |
кривошип |
повзун |
Положення решти ланок визначають “методом засічок”, який побудовано на тому положенні ТММ, що всі ланки є абсолютно жорсткими та не змінюють своїх розмірів.
Отже, знаючи траєкторії точок ланок механізму, можна визначити положення будь-якої точки ланки у будь-який момент часу “засічкою”, тобто розхилом циркуля на певну довжину ланки.
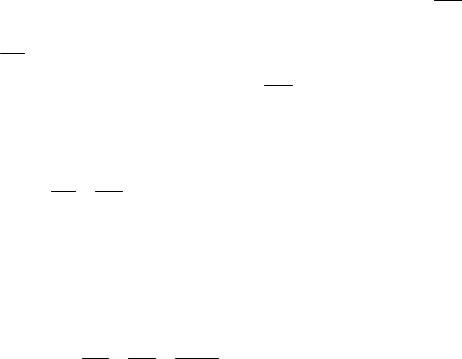
Розглянемо приклад уже вибраного раніше ШВМ завантажника (рис. 4.3):
Рис. 4.3. Плани положень механізму
44
Порядок побудови плану положень (рис. 4.3):
1.Вибираємо масштаб плану положень, наприклад,
l = 0,002 м/мм.
2.Розмічаємо точки стояка (відстані a, b... задані завданням на проектування).
3.Проводимо траєкторії точок А (коло), В (дуга), С (пряма), знаючи довжини ланок О1А, О2В.
4.Знаходимо “крайні” положення механізму. Як правило, їх два. При цьому кривошип О1А і шатун АВ або витягуються в одну пряму, або шатун АВ накладається на кривошип О1А. Отже, “засічками” довжиною ланок (О1А + АВ), потім (АВ - О1А) знаходимо на відповідній траєкторії точки В (на дузі О2В); потім “засічкою” довжиною ланки ВС знаходимо крайні положення повзуна С на його траєкторії.
5.Із двох “крайніх” положень механізму за “початок робочого ходу” приймаємо те, з якого рух повзуна С починається проти
заданого напрямку сили корисного опору FКО.
6. Усім точкам “початку робочого ходу” надається індекс “0”,
а “кінцю робочого ходу” – відповідно “0' ”.
7.Відстань між “крайніми” положеннями вихідної ланки
(повзуна С) називається ходом механізму (Н) - це головна характеристика шарнірно-важільних механізмів.
8.Починаючи з точки А0, ділимо коло кривошипа на 12 рівних частин, точки розподілу нумеруємо 1....12 у напрямку обертання кривошипа.
9.Положення решти точок механізму знаходимо “методом засічок”.
10. Якщо необхідно побудувати траєкторію |
точки, |
яка |
лежить |
||
на ланці (наприклад, точка S у середині шатуна АВ), |
то в усіх |
||||
положеннях |
механізму знаходимо |
на |
цій ланці |
точку S |
|
і з'єднуємо |
всі ці точки плавною |
кривою. |
Така крива |
||
називається “шатунною кривою”. Характеризує важливі властивості механізму.
4.5. Кінематичний аналіз механізмів методом планів швидкостей та прискорень
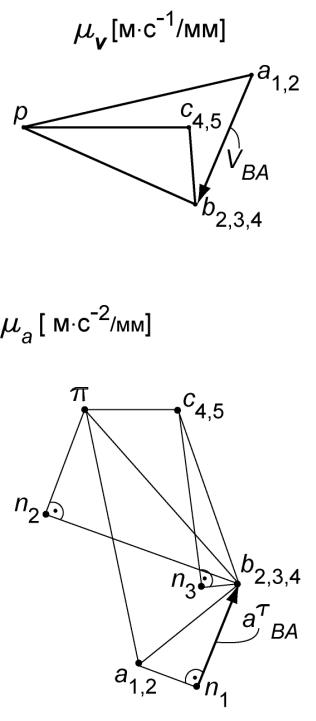
4.5.1. Властивості планів швидкостей
План швидкостей – це геометрична фігура, на якій з однієї точки (полюса) виходять променями вектори абсолютних швидкостей точок.
45

Властивості плану швидкостей
1. Абсолютні швидкості проходять через полюс плану та спрямовані від полюса.
2.Відносні швидкості через полюс плану не проходять.
3.Кінці векторів абсолютних швидкостей точок ланки утворюють
фігуру, подібну до фігури ланки, і повернуті відносно неї на кут /2.
4.Полюс плану є зображуючою точкою миттєвого центра швидкостей ланки.
5.План швидкостей будується на основі розв'язання векторного рівняння:
|
|
|
|
va ve vr , |
(4.16) |
|
|
|
|
|
абсолютна швидкість точки; |
|
|
де |
va |
- |
ve |
- переносна швидкість |
||
точки; |
vr |
- відносна швидкість точки. |
|
|||
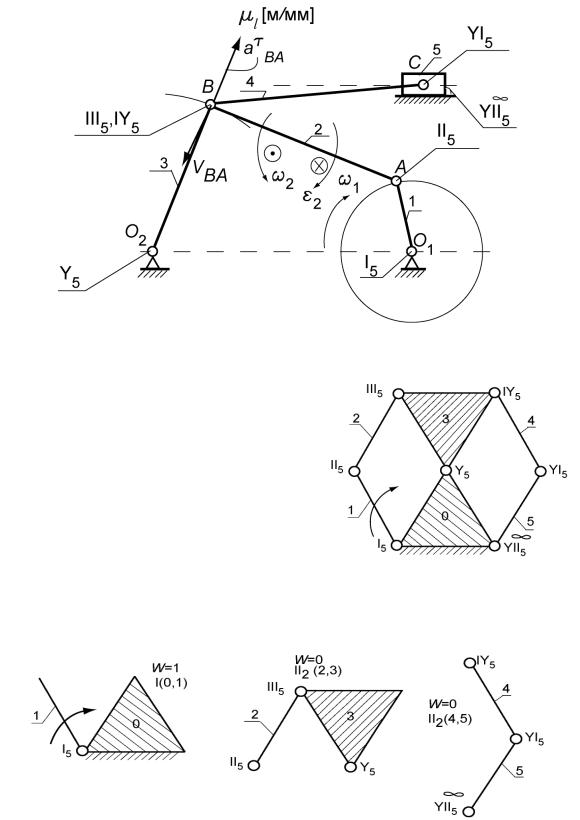
4.5.2. Методика побудови планів швидкостей механізму 2-го класу
Розглянемо приклад шарнірно-важільного механізму завантажника термічної печи (рис. 4.4).
Кінематичному аналізу механізму (КАМ) завжди передує структурний.
1. Визначаємо степінь рухомості даного плоского механізму за формулою Чебишева:
n 5; p5 7; p4 0.
W 3n 2p5 p4 3 5 2 7 0 1.
Потрібен 1 двигун.
2. Складаємо структурну схему механізму (рис. 4.4, в) за допомогою таблиці ланок і кінематичних пар (рис. 4.4, б), користуючись відомим алгоритмом п. 1.12.
3. Виділяємо початковий механізм (рис. 4.4, г) і групи Ассура
(рис. 4.4, д і е).
4. Формула будови механізму:
I(0,1) II2 (2,3) II2 (4,5). Механізм 2-го класу.
План швидкостей (рис.4.4, ж) будується для заданого положення механізму, починаючи з початкового механізму. Будуємо його для положення, наведеного на рис. 4.4, а.
46
4.5.2.1.Початковий механізм
1.Визначаємо швидкість т. А1 кривошипа, м/с:
|
|
|
vA 1 |
lO A, |
(4.17) |
||||||||
1 |
|
|
|
|
|
1 |
|
||||||
де 1 – кутова швидкість кривошипа, с-1; |
|
||||||||||||
|
|
|
|
|
n1 |
, |
(4.18) |
||||||
|
|
||||||||||||
1 |
30 |
|
|
|
|
||||||||
де n – частота обертання кривошипа, хв-1 |
(за завданням). |
||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Приймаємо масштаб плану швидкостей, мс-1/мм: |
||||||||||||
|
|
|
|
|
|
|
|
vA |
|
||||
|
|
|
v |
|
|
|
1 |
|
, |
(4.19) |
|||
|
|
|
|
||||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
pa |
|
||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
де |
|
- відрізок на плані, що зображує швидкість т. А1, мм. |
|||||||||||
pa1 |
|||||||||||||
|
Приймаємо відрізок |
|
|
від 50 до 80 мм, але таким чином, |
|||||||||
|
pa1 |
||||||||||||
щоб масштаб v був зручним для користування, наприклад,
0,01 мс-1/мм або 0,005 мс-1/мм (для цього між значеннями vA1 і pa1
має бути кратність 1, 2, 2.5, 4, 5....як у технічному кресленні). Вектор vA1 перпендикулярний до кривошипа О1А у бік 1.
Із довільного полюса р проводимо відрізок pa1 перпендикулярний до кривошипа О1А у бік 1.
4.5.2.2.Група 2-3
1.Швидкість vA1 vA2 , тому що ланки 1 і 2 зв’язані
обертальною парою. Біля т. а1 ставимо т. а2. |
||||
|
|
|
Ланки 2 і 3 також зв’язані обертальною парою, тому |
|
|
|
|
|
. |
vB |
vB |
|||
2 |
3 |
|
||
|
|
|
2. Для визначення швидкості т. В складаємо два векторних |
|
рівняння, тому що т. В належить двом ланкам: |
||||
|
|
|
|
|
|
v |
B2 |
v |
A2 |
v |
B2A2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
(4.20) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
vB |
vO |
|
|
|
|
||||||||
|
|
|
|
|
|
vB |
vB O |
|
|
|||||||||||
|
|
|
|
|
|
|
2 |
|
|
3 |
|
|
2 |
3 |
2 |
|
|
|
||
де швидкість |
|
|
перпендикулярна до ланки ВА; |
|
= 0, т. щ. це |
|||||||||||||||
vB A |
2 |
vO |
||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||
стояк; |
|
|
перпендикулярна до ланки.ВО2. |
|
|
|||||||||||||||
vB O |
2 |
|
|
|||||||||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
47
а.
I5 |
II5 |
III5 |
IY5 |
Y5 |
YI5 |
YII5 |
|
|
|
|
|
|
|
0,1 |
1,2 |
2,3 |
3,4 |
3,0 |
4,5 |
5,0 |
|
|
|
|
|
|
|
|
|
|
б. |
|
|
|
в.
г. д. е.
48
ж.
з.
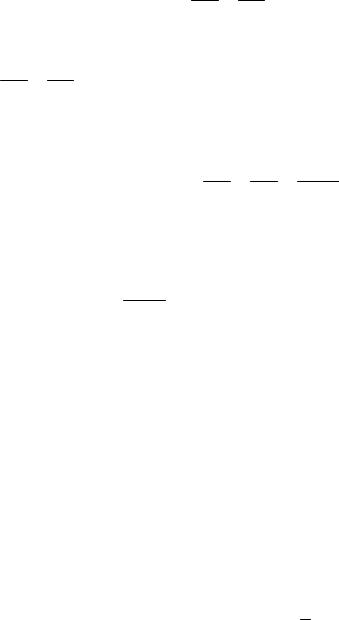
Рис. 4.4:
а. - КСМ; б. - таблиця ланок і КП; в. - структурна схема ШВМ; г. - початковий механізм; д, е - групи Ассура; ж. - план швидкостей;
з.- план прискорень
49
Із т. а2 проводимо пряму, перпендикулярну до ланки ВА, а з полюса р - пряму, перпендикулярну до ланки ВО2.
На перетині отримуємо т. b2,3. Тоді швидкість т. В:
vB2,3 pb2,3 v.
4.5.2.3.Група 4-5
1.Швидкість vB4 vB3 , тому що ланки 3 і 4 зв'язані
обертальною парою. Біля т. b3 ставимо т. b4 .
Ланки 4 і 5 також зв'язані обертальною парою, тому
vC4 vC5 .
2. Для визначення швидкості т. С складаємо два векторних рівняння, тому що т. С належить двом ланкам:
|
|
|
v |
C4 |
v |
B4 |
v |
C4B4 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
, |
(4.21) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
vC |
|
vO vC O |
|
||||||||||||
|
|
|
vC |
4 |
5 |
3 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
5 |
|
|
|
|
||||
де швидкість |
|
перпендикулярна |
до ланки CB, |
|
|
= 0, |
|||||||||||||||
vC B |
vO |
||||||||||||||||||||
4 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|||
т.щ. це стояк; vC5O3 паралельна вісі руху повзуна С.
Через точку b4 проводимо пряму, перпендикулярну до ланки
СВ, а через полюс р - горизонтальну пряму, паралельну вісі руху повзуна С.
3. На перетині отримуємо т. c4,5. Тоді швидкість т. С:
vC4,5 (pc4,5 ) v .
4.5.2.4. Визначення кутової швидкості за планом швидкостей
1.Із курсу теоретичної механіки відомо, що кутова швидкість
, с-1, визначається за формулою:
v ,
l
де v - лінійна швидкість, м/с; l - довжина ланки, м.
2. Розглянемо методику визначення кутової швидкості на прикладі механізму завантажника (рис. 4.4).
50