

ТЕМА 3. Структурний синтез мех
..pdfТЕМА 3. СТРУКТУРНИЙ СИНТЕЗ МЕХАНІЗМІВ
3.1. Задачі
Проектування структурної схеми механізму, яка задовольняє задані умови:
число ланок;
число кінематичних пар відповідних класів;
степінь вільності механізму.
Механізм – це ланцюг вимушеного руху. Інакше, якщо одну з ланок кінематичного ланцюга з'єднати з двигуном (кількома двигунами) і решта ланок буде здійснювати визначений закономірний рух, то з кінематичного ланцюга отримуємо механізм за умови, що одну з ланок перетворено на стояк.
3.2. Структурна формула просторового механізму (формула Сомова-Малишева)
Позначимо:
k - число ланок кінематичного ланцюга; p1 - число кінематичних пар 1-го класу;
p2 - число кінематичних пар 2-го класу; p3 - число кінематичних пар 3-го класу; p4 - число кінематичних пар 4-го класу; p5 - число кінематичних пар 5-го класу;
6k - число степенів вільності до утворювання кінематичного ланцюга.
Тоді при утворюванні кінематичного ланцюга (H – степінь рухомості КЛ):
H 6k p1 |
2p2 |
3p3 |
4 p4 |
5p5. |
(3.1) |
При перетворенні кінематичного ланцюга на механізм одна з ланок перетворюється на стояк, тоді степінь рухомості механізму:
W H 6 |
(3.2) |
або
W 6 k 1 p1 2 p2 3p3 4 p4 5p5.
Позначимо: k 1 n - число рухомих ланок , тоді остаточно:
29
W 6n 5p5 |
4p4 |
3p3 |
2p2 |
p1 |
(3.3) |
- структурна формула просторового механізму або формула Сомова - Малишева.
3.3. Структурна формула плоского механізму (формула Чебишева)
Як відомо, тіло в площині має 3 степеня вільності, отже, перетворюємо формулу Сомова – Малишева з урахуванням зазначеного:
W 6 3 n 5 3 p5 4 3 p4 3 3 p3
або
W 3n 2p5 |
p4 |
(3.4) |
- структурна формула плоского механізму або формула Чебишева.
Степінь рухомості механізму вказує на кількість двигунів,
якими механізм приводиться до руху, або на кількість початкових ланок, або узагальнених координат.
3.4. Зв'язки механізму
3.4.1. |
Зв'язки, |
що накладені |
кінематичною парою |
(див. п. 1.8.2.). |
зв'язки - це |
зв'язки, що накладені |
|
3.4.2. |
Загальні |
||
ще до утворювання кінематичного ланцюга. Число таких зв'язків:
C 6 A, де А – коефіцієнт при n у структурній формулі.
Наприклад, для плоского механізму C 6 3 3. |
|
||||
За |
числом |
загальних зв'язків |
механізми |
діляться |
|
на 5 сімейств (за |
І.І.Артоболевським). |
Плоскі |
механізми, |
||
відповідно, відносяться до третього сімейства. |
|
|
|||
3.4.3. |
Надлишкові (пасивні) зв'язки – |
це |
зв'язки, |
||
що повторюються, але фактично не змінюють степеня рухомості механізму.
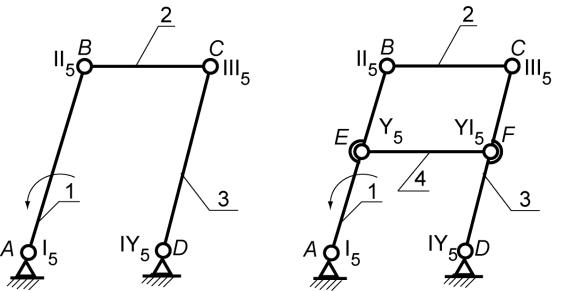
Розглянемо приклад плоского механізму (рис. 3.1).
30
|
Рис. 3.1 |
|
Рис. 3.2 |
|
Визначимо степінь рухомості за формулою Чебишева: |
|
|||
|
n 3; p5 4; p4 0. |
|
|
|
|
W 3n 2p5 p4 3 3 2 4 0 1. |
|
||
Потрібен 1 двигун. |
|
|
|
|
Для |
підвищення |
жорсткості |
конструкції |
(або |
з функціональних міркувань) у механізм уводять додаткову ланку
EF (рис. 3.2).
Визначаємо степінь рухомості механізму на рис. 3.2:
n 4; p5 6; p4 0.
W 3n 2p5 p4 3 4 2 6 0 0.
Але фактичний степінь рухомості Wф 1. Отже, цей
результат означає, що в механізмі є надлишковий зв'язок (ланка EF).
До появи надлишкових зв'язків призводять:
уведення додаткових ланок для надання специфічних властивостей механізму;
неточності виготовлення ланок і кінематичних пар;
залишкові або пружні деформації ланок.
31

Надлишкові зв'язки:
вимагають підвищеної точності виготовлення механізму, що підвищує його вартість;
призводять до збільшення сил тертя у кінематичних парах, що зменшує надійність механізму;
призводять до статичної невизначеності механізму.
Висновок: раціонально спроектовані механізми не повинні мати надлишкових зв'язків.
3.4.4. Формули Озола для визначення числа надлишкових зв'язків:
для плоских механізмів:
q Wф 2p5 p4 3n. |
(3.5) |
||
для просторових механізмів: |
|
|
|
q Wф 5p5 4p4 3p3 |
2p2 |
p1 6n, |
(3.6) |
де q - число надлишкових зв'язків; Wф - фактичний степінь рухомості.
3.4.5. Усунення надлишкових зв'язків
Одним із методів усунення надлишкових зв'язків є зміна класу кінематичної пари.
Розглянемо приклад шарнірно-важільного механізму
(рис. 3.3).
Рис. 3.3
32
Якщо в даному механізмі осі шарнірів A,B,C паралельні, тобто виконуються умови: X A // XB // XC і AX AZ , то механізм є плоским, і
його степінь рухомості можна визначити за формулою Чебишева:
n 3; p5 4; p4 0. W 3n 2p5 p4 3 3 2 4 1.
Потрібен 1 двигун.
Якщо з будь-яких причин осі шарнірів не паралельні, тобто вищенаведені умови не виконуються, то механізм стає просторовим, і його степінь рухомості необхідно обчислювати за формулою СомоваМалишева:
W 6n 5p5 4p4 3p3 2p2 p1 6 3 5 4 2.
Тут p4 p3 p2 p1 0 .
Такий результат свідчить про наявність у механізмі надлишкових зв'язків (механізм буде рухатися зі "скрипінням", при цьому знос кінематичних пар різко зростає, що неприпустимо).
Визначимо число надлишкових зв'язків за формулою Озола для просторових механізмів (фактичний степінь рухомості Wф =1).
q Wф 5p5 4p4 3p3 2p2 p1 6n 1 5 4 6 3 3.
У даному механізмі 3 надлишкові зв'язки.
Одним із методів усунення надлишкових зв'язків є зміна класу кінематичної пари.
Змінюємо в шарнірі С даного механізму кінематичну пару 5-го класу на кінематичну пару 3-го класу - сферичний шарнір
(рис. 3.4).
Число надлишкових зв'язків за формулою Озола:
q Wф 5p5 4p4 3p3 2p2 p1 6n 1 5 3 3 1 6 3 1.
Тут n 3; p5 3; p4 0; p3 1; p2 p1 0. Wф 1.
Залишився один надлишковий зв'язок.
33
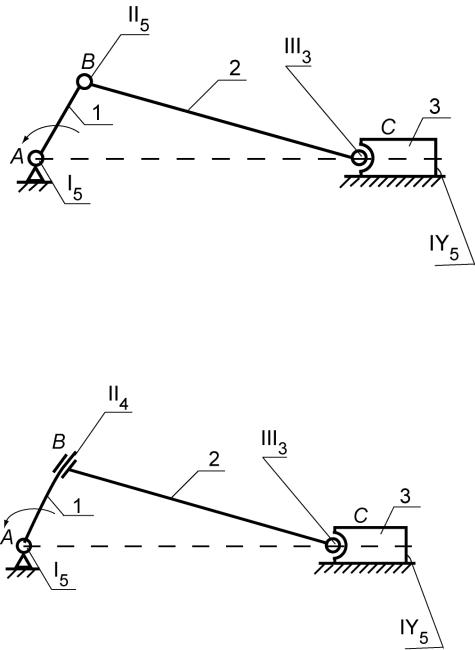
Рис. 3.4
Змінимо тепер клас кінематичної пари в шарнірі В із 5-го на 4-й – (циліндрична пара), як показано на рис. 3.5.
Рис. 3.5
Число надлишкових зв'язків за формулою Озола:
q Wф 5p5 4p4 3p3 2p2 p1 6n 1 5 2 4 1 3 1 6 3 0.
Тут n 3; p5 2; p4 1; p3 1; p2 p1 0. Wф 1.
Висновок: зміною класу пар позбавилися надлишкових зв'язків.
34
3.5. Місцеві рухомості (зайві степені вільності)
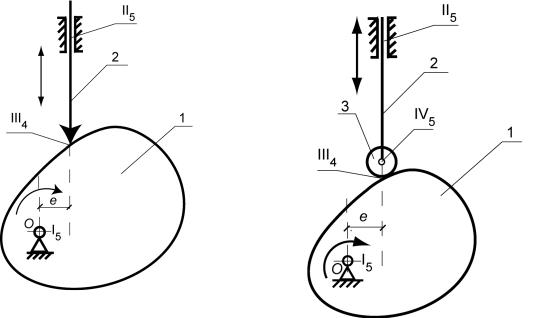
Розглянемо приклад кулачкового механізму з гострим штовхачем, який наведено на рис. 3.6.
Визначимо степінь рухомості даного плоского механізму за формулою Чебишева:
n 2; p5 2; p4 1. W 3n 2p5 p4 3 2 2 2 1 1.
Потрібен 1 двигун.
Рис. 3.6 |
Рис. 3.7 |
Даний механізм має великий недолік – гострий штовхач призводить до великого тертя та відповідно зношування поверхні кулачка.
Для зменшення тертя у механізм уводиться додаткова ланка – ролик 3 (рис. 3.7), тому що тертя кочення менш за тертя ковзання, і знос поверхні кулачка зменшується.
Визначимо степінь рухомості механізму на рис. 3.7:
n 3; p5 3; p4 1.
W 3n 2p5 p4 3 3 2 3 1 2,
це означає, що в механізмі є місцева рухомість (ролик 3 обертається навколо власної осі).
Фактичний степінь рухомості Wф 1, другий двигун не потрібен.
Місцева рухомість не впливає негативно на роботу механізму,
35
навпаки, як у даному випадку, покращує її (зменшення тертя).
3.6. Утворювання механізмів шляхом нашарування груп Ассура
Л.В.Ассур (1878-1920 р.р.) довів, що будь-який механізм може бути утворений шляхом приєднання до так званого початкового механізму структурних груп – груп Ассура.
Більшість механізмів мають степінь рухомості W 1, отже,
убільшості випадків початковий механізм один.
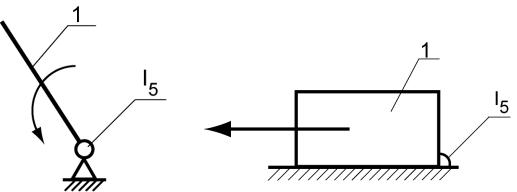
3.6.1.Початковий механізм
За початкову ланку найчастіше приймають кривошип (а) або повзун (б), тому початковий механізм має вигляд (рис. 3.8):
W 3n 2p5 3 1 2 1 1. |
W 3n 2p5 3 1 2 1 1. |
I 0,1 |
I 0,1 |
а. |
б. |
|
Рис. 3.8 |
За І.І.Артоболевським такий механізм називається механізмом 1-го класу (за Ассуром – 1-го класу 1-го порядку).
3.6.2. Структурна група – група Ассура
Групою Ассура називається кінематичний ланцюг, який має нульову рухомість у разі приєднання його до стояка, і який не розпадається на більш прості групи.
Структурна формула групи Ассура має вигляд:
36
|
|
|
|
|
|
W 3n 2p5 |
0. |
|
|
(3.7) |
||||||
|
Отже, |
3n 2p |
5 |
, |
p |
5 |
3 |
n, де |
n |
- число рухомих ланок, може |
||||||
бути тільки парним. |
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Таблиця ланок і кінематичних пар |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
2 |
|
|
|
|
4 |
|
|
|
6 |
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p5 |
|
|
|
3 |
|
|
|
|
6 |
|
|
|
9 |
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
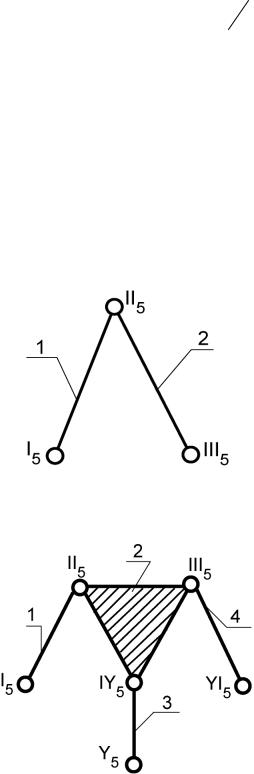
Розглянемо стандартні групи Ассура (рис. 3.9...3.11).
n 2; p5 3;
W 3n 2p5 3 2 2 3 0.
II2 1,2 .
Група 2-го класу 2-го порядку – за Артоболевським
(двоповідкова – за Ассуром).
Рис. 3.9
n 4; p5 6;
W 3n 2p5 3 4 2 6 0.
III3 2.1,3,4 .
Група 3-го класу 3-го порядку – за Артоболевським
(триповідкова – за Ассуром).
Рис. 3.10
37
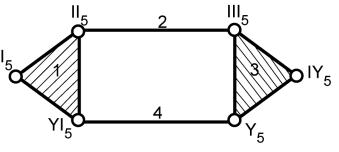
|
n 4; p5 6; |
|
|
W 3n 2p5 3 4 2 6 0. |
|
|
IY2 1.3.2,4 . |
|
|
Група 4-го класу |
|
|
2-го порядку – |
|
|
за Артоболевським |
|
Рис. 3.11 |
(4-го класу нульового |
|
порядку за Ассуром). |
||
|
Отже, як визначається клас і порядок групи Ассура?
Клас групи визначається числом сторін найбільш складного замкнутого контуру.
Порядок групи визначається числом вільних елементів, якими група приєднується до вихідного механізму (за Артоболевським).
За Ассуром – порядок групи визначається кількістю повідків, якими група приєднується до вихідного механізму (тому група на рис. 3.11 – нульового порядку).
3.7. Класифікація механізмів
Існує три принципи класифікації механізмів:
структурно-конструктивна (механізми: шарнірно-важільні, кулачкові, зубчасті, фрикційні, з гнучкою ланкою тощо);
функціональна (за призначенням: механізми передач, сортування, вмикання, вимикання тощо);
структурна (за Ассуром).
Клас механізму визначається класом найскладнішої групи Ассура, що входить до його складу.
Розглянемо приклад: маємо шарнірно-важільний механізм
(ШВМ) завантажника термічної печі (рис. 3.12).
1.Визначаємо степінь рухомості даного плоского механізму за формулою Чебишева:
n 5; p5 7; p4 0;
W 3n 2p5 p4 3 5 2 7 0 1.
Потрібен 1 двигун.
38