

5. Построение лв усилий фермы
Рассмотрим ферму (рис. 5.6 а). При воздействии только вертикальной нагрузки ее опорные реакции будут такими же как у вспомогательной балки (рис. 5.6 б). Поэтому ЛВ опорных реакций фермы будут аналогичны ЛВ балки (рис. 5.6 в, г).
Для построения ЛВ продольных усилий фермы воспользуемся способами вырезания узлов и сквозных сечений.
а) Использование способа вырезания узлов
Для построения ЛВ N2-6 вначале рассмотрим узел 1. Так как к этому узлу силы не приложены, то по признаку 1 N1-6=0.
После этого вырежем узел 6 фермы. Здесь могут быть два случая:
1) когда единичная сила P=1 находится в этом узле (рис. 5.6 е), то
Y= N2-6 sin+1–1=0. Отсюда N2-6=0.
2) когда единичная сила P=1 находится вне этого узла (рис. 5.6 ж), то
Y=N2-6 sin+RA=0.
Отсюда
N2-6= –![]() RA.
RA.
Тогда, используя ЛВ опорной реакции RA, можно построить ЛВ усилия N2-6 (рис. 5.6 д).
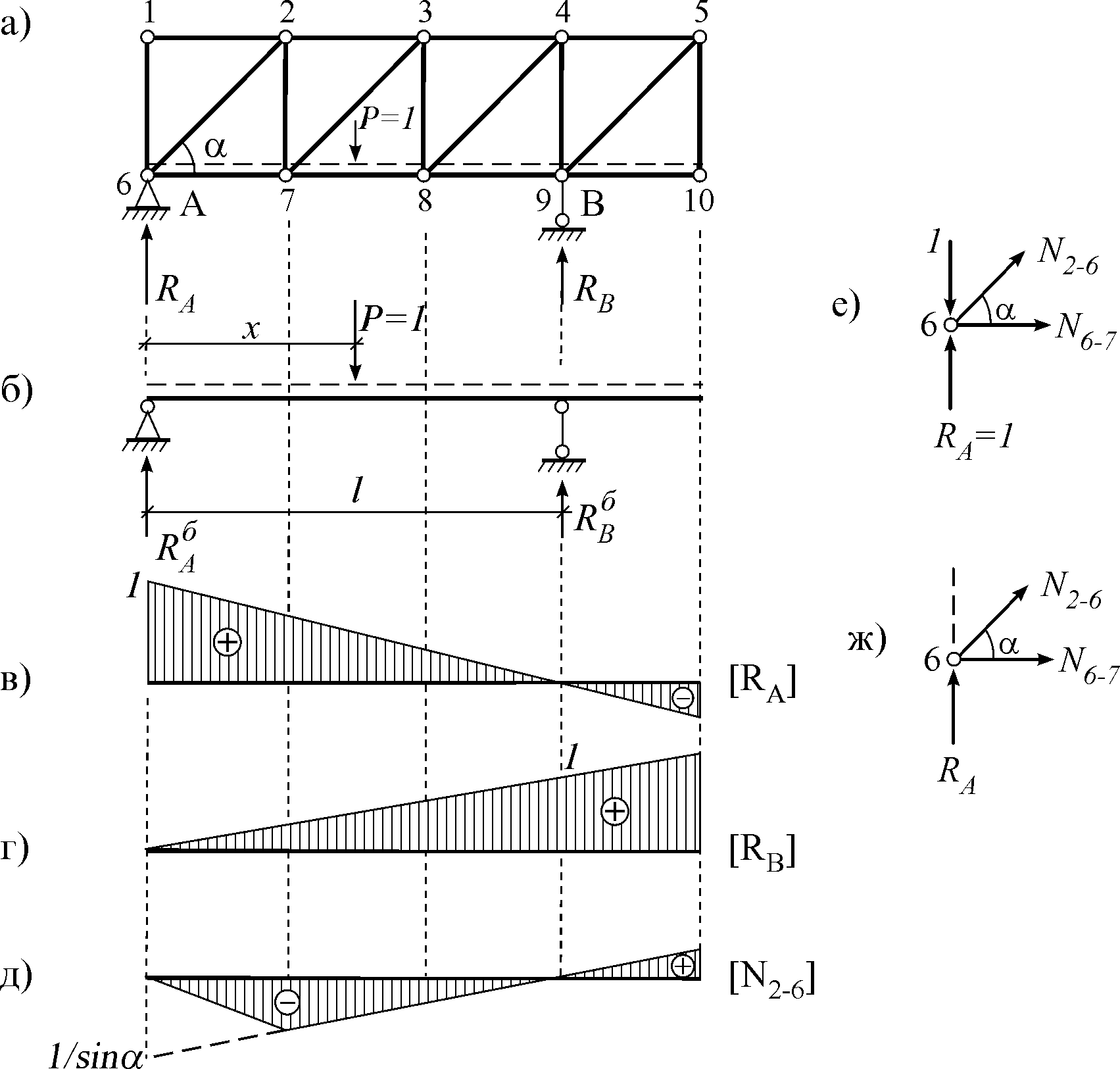
Рис. 5.6
б) Использование способа сквозных сечений
Поперек фермы проведем сквозное сечение I–I (рис. 5.7 а) и получим независимые левые и правые части. Единичная сила P=1 может находиться в обоих частях фермы.
1) Единичная сила левее сечения (рис. 5.7 б):
M![]() =N2-3 h+RB 2a=0.
Отсюда
N2-3= –2
=N2-3 h+RB 2a=0.
Отсюда
N2-3= –2![]() RB
;
RB
;
Y![]() = –N3-7 sin+RB=0.
Отсюда
N3-7=
= –N3-7 sin+RB=0.
Отсюда
N3-7=![]() RB
.
RB
.
2) Единичная сила правее сечения (рис. 5.7 в):
M![]() = –N2-3 h
– RA a=0.
Отсюда
N2-3= –
= –N2-3 h
– RA a=0.
Отсюда
N2-3= –![]() RA
;
RA
;
Y![]() =N3-7 sin+RA=0.
Отсюда
N3-7= –
=N3-7 sin+RA=0.
Отсюда
N3-7= –![]() RA
.
RA
.
В первом случае определяем ординаты ЛВ этих усилий между узлами 6-7, т.е. определяем их левые ветви, а во втором случае определяем ординаты обоих ЛВ между узлами 8-10, т.е. определяем правые ветви ЛВ. Соединив точки между узлами 7-8, получаем переходную прямую и окончательный вид ЛВ (рис. 5.7 г, д ).

Рис. 5.7
Как видно из этих примеров, у ЛВ продольных усилий фермы есть следующее свойства: ветви ЛВ пересекаются под моментной точкой; если же моментной точки нет, ветви ЛВ параллельны.
В о п р о с ы
1. Что такое линия влияния и чем она отличается от эпюры?
2. В чем преимущество метода линий влияния?
3. Чем отличается ЛВ при узловой передаче нагрузки?
4. Как определяется усилие от постоянной нагрузки по ЛВ?
5. Какие способы используются при построении ЛВ усилий фермы?
Л е к ц и я 6 определение перемещений
1. Понятие о перемещениях
При воздействии нагрузки, температуры и других факторов сооружения меняют свою форму, а его точки получают перемещения.
Перемещение
– векторная величина. Перемещение любой
точки на плоскости можно задать через
его модуль и направление. Например,
вектор перемещения
![]() точки А
рамы в точку А
(рис. 6.1 а) определяется через его
модуль A
и угол (направление) A
(рис. 6.1 б). А эти величины можно
определять через горизонтальную и
вертикальную составляющие xA
и yA
вектора перемещения
точки А
рамы в точку А
(рис. 6.1 а) определяется через его
модуль A
и угол (направление) A
(рис. 6.1 б). А эти величины можно
определять через горизонтальную и
вертикальную составляющие xA
и yA
вектора перемещения
![]() :
:
A=![]() , A=arc
tg
, A=arc
tg![]() .
.
Поступательные перемещения A, xA, yA будем называть линейными перемещениями, а A – угловым перемещением.

Рис. 6.1
Методы определения перемещений основаны на определении работ внешних и внутренних сил. В механике рассматриваются два вида таких работ – действительные и возможные работы.