

6.6 Обеспечение механической устойчивости конструкций ис
В процессе транспортировки и эксплуатации микросхемы подвергаются механическим воздействиям. Механические воздействия представлены сочетанием вибраций, ударов, линейных ускорений. При этом в элементах конструкций могут возникать кратковременные или длительные чрезмерные механические напряжения, сопровождаемые недопустимыми остаточными деформациями или разрушением.
При проектировании конструкций ИС должны быть обеспечены необходимые механическая жёсткость и прочность. Жёсткость конструкции количественно представляется отношением силы, действующей по некоторому направлению, к величине деформации (обычно относительной), вызываемой этой силой. Прочность конструкции характеризуется значением параметра нагрузки, при котором остаточные деформации не превышают заданной нормы. К конструкциям ИС предъявляются требования, определяемые как вибро- и ударопрочность, вибро- и удароустойчивость. В отличие от соответствующей прочности, устойчивость характеризует способность конструкции сохранять параметры в рабочем режиме в заданных нормах при нормированных механических воздействиях.
Условия эксплуатации микроэлектронной аппаратуры, содержащей микросхемы, нормативно ранжированы в двадцать групп по воздействию вибраций, в четыре группы — по многократным ударам, в восемь групп — по одиночным ударам, в семь групп — по линейным ускорениям [15,16].
Вибрации характеризуются частотой w, амплитудой A, продолжительностью Tw и скоростью изменения частоты Vw. Диапазон частот вибраций от одного до 5000 Гц разбит на поддиапазоны со значениями допустимых ускорений от 0,5 до 40 g. Продолжительность действия, как скорость изменения частоты вибраций, не нормируется.
Многократные удары в выделенных группах характеризуются максимальным ускорением при ударе от 15 до 150 g при длительности удара от 1–15 mcек до 1–3 mcек. Одиночные удары характеризуются максимальным ускорением при ударе от 4 до 3000 g при длительности удара от 40–60 mcек до 0,2–0,5 mcек.
Значения линейных ускорений в выделенных группах нормируются в диапазоне от 10 до 500 g при произвольной длительности.
При вибрациях, ударах и статических перегрузках (при постоянных силах воздействия) на элементы конструкции микросхемы действуют нагрузки, пиковые значения результирующей силы F которых определяются согласно второму закону механики массой элемента m и ускорением а. Благодаря малой массе, сила, действующая на элементы микросхемы (включая подложку), пренебрежимо мала по сравнению с пределами механической прочности клеевых и паяных соединений. Так при действии ускорения 150 g в плоскости керамической подложки размером 3024 мм действующее сдвиговое напряжение в присоединительном слое составляет около 60 кПа, что примерно в сто раз меньше предела прочности на сдвиг (единицы МПа) соединений на основе современных клеев.
Существенное влияние на прочность конструкций микросхем оказывают длительные вибрационные воздействия частотой 5…5000 Гц и собственные колебания при ускорениях до 40 g и многократные удары, которые могут привести к усталостным разрушениям.
Увеличение площади и массы корпусов микросхем при повышении степени интеграции негативно влияет на вибро- и ударопрочность конструкций ИС. Кинематические схемы монтажа корпусированных ИС на несущих платах типовых элементов замены, определяющие специфику реакции ИС при механических воздействиях, изображены в позициях а, б, в, г рисунка 6.23.
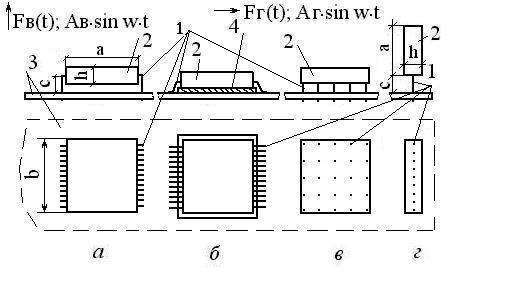
Рисунок 6.23
На рисунке 6.23 номером 1 обозначены выводы внешних электрических подключений ИС, являющиеся одновременно элементами механического монтажа корпуса 2 ИС на несущей плате 3 (для позиций а, в, г рисунка). В позиции б рисунка корпус 2 ИС фиксируется на плате 3 не только с выводами внешних подключений 1, но и дополнительным присоединительным слоем 4.
Микросхемы и несущее основание 3 представляют собой «подвижные» объекты, которые в зависимости от вида механического воздействия и способа монтажа способны деформироваться и совершать колебания относительно своих исходных положений. На рисунке 6.23 показаны составляющие механические воздействия в виде изменяющихся во времени сил Fi(t) и вибраций с амплитудой Ai и частотой w. Различают два вида колебаний элементов конструкции при внешнем воздействии на них. Один вид колебаний — это так называемые собственные колебания, а другой вид колебаний — это вынужденные колебания. Вынужденными называются установившиеся колебания под воздействием внешней гармонически изменяющейся силы, и их амплитуда зависит как от механических параметров элемента конструкции, так и от амплитуды Ai и частоты w возмущающего воздействия. Собственные так же характеризуются амплитудой и частотой w0, которые определяются исключительно механическими параметрами элемента конструкции с учётом способа его закрепления. Для реальных элементов эти колебания постепенно затухают после прекращения возмущающего воздействия. Явление наблюдаемое при совпадении собственной частоты колебаний элемента конструкции w0 c частотой возмущающего воздействия w получило название резонанса, а частота w0 — наименование резонансной частоты.
Элемент позиции в, вследствие малости размера с и соотношения h > (2–3)c, имеет, благодаря равномерному распределению по основанию корпуса монтажных точек выводов внешних электрических подключений ИС, жёсткую связь с платой 3 (сравнимую с жёсткостью связи конструкции монтажа по позиции б). Деформации корпуса ИС в названных позициях монтажа в основном повторяют деформации эквивалентной (с учётом покрытия смонтированными компонентами) несущей платы 3.
Монтаж ИС, показанный на поз. а рисунка, и особенно на позиции г, обуславливает появление собственных деформаций корпуса ИС при механических воздействиях на фоне деформаций совместно с несущей платой. Позиции а монтажа ИС соответствуют колебательные и статические изгибные деформации выводов 1 в точках соединения с платой и телом корпуса 2 при горизонтальных механических воздействиях. При вертикальных механических воздействиях происходят деформации растяжения/сдвига в соединениях выводов 1 с телом корпуса 2 и платой 3 под влиянием статических и ударных нагрузок, а также колебательные изгибные деформации тела корпуса ИС.
Монтажная композиция, соответствующая позиции г рисунка 6.23, представляется наименее слабой при горизонтальных механических воздействиях. Изгибной деформации в этом исполнении подвержены выводы 1 внешних подключений ИС. В месте соединения их с несущей платой при колебаниях консоли, нагруженной телом корпуса ИС, многократные знакопеременные изгибы приводят к усталостному разрушению выводов, разрушению соединений и отказу устройства.
Максимальные механические напряжения при статических и импульсных силовых воздействиях, как отмечалось, определяются инерционными свойствами корпусов ИС (массой m и ускорением а), эквивалентной площадью напряженного сечения элемента конструкции Sэкв и не должны превышать значений σдоп, соответствующих обратимым (упругим) деформациям по условию
(m∙a)мах/Sэкв ≤ σдоп. (6.13)
При воздействии вибрации частоты w и амплитуды А амплитудное значение ускорения определяется по формуле
амах = w2∙А (6.14)
и пропорционально значению А. Для колебательных процессов характерным является многократное, при малых потерях на трение (торможение процесса), увеличение амплитудных значений колебаний при совпадении собственных (резонансных) частот колебаний конструкции с внешними вынуждающими колебаниями (например, вибрациями). Зависимость отношения амплитуды колебаний элемента Аэ к амплитуде вынуждающей вибрации Ав от отношения частоты вынужденных колебаний w к собственной резонансной частоте конструкции w0 представляется выражением вида [16]
ψ = Аэ/Ав = [1 + (d0∙ w/w0)2]1/2/{[1– (w/w0)2]2 + (d0∙ w/w0)2}1/2,
(6.15)
где d0 < 1 — коэффициент демпфирования колебаний (определяется потерями энергии при деформации конструкции). При w/w0 = 1 значение коэффициента ψ снижается при увеличении d0 по закону
ψ = [(1 + d02)/d02]1/2
от 1/d0 при d0 ≤ 0,03 до единицы при d0 ≥ 3.
Выражение (6.15) применяется при выборе параметров амортизаторов для тех обстоятельств, когда демпфирование собственных резонансных колебаний функциональных элементов конструкции является недостаточным или не допустимо. Из выражения (6.15) следует, что при w/w0 > √2 коэффициент ψ снижается при повышении частоты вынуждающих колебаний относительно резонансной частоты элемента или прибора. Следовательно, размещая элементы конструкции с недостаточно демпфированными собственными резонансными колебаниями в несущей конструкции с собственной резонансной частотой в 3–5 раз более низкой по сравнению минимальной резонансной частотой размещённых элементов, можно на один-два порядка снизить амплитуду вынуждающих колебаний для этих элементов. Увеличение коэффициента демпфирования амортизаторов несущей конструкции снижает эффективность ослабления вынуждающих колебаний. Тем не менее уменьшение коэффициента демпфирования нежелательно из-за ослабления затухания свободных собственных колебаний несущей амортизированной конструкции.
Частота внешних механических воздействий в реальных условиях не остаётся постоянной. Если частота внешнего воздействия повышается по линейному закону, то максимальные амплитуды колебания амортизированной несущей конструкции имеют место при частоте вынужденной вибрации несколько выше её резонансной частоты. Максимальная амплитуда свободных колебаний амортизированной конструкции достигается тем меньшей, чем больше скорость изменения частоты при проходе через область резонанса. Это явление связано с увеличением инерционности при уменьшении демпфирования резонанса, вследствие чего амортизированная конструкция не успевает раскачаться за время прохода через область резонанса.
Для оценки необходимости и выбора способа противодействия вибрациям элементов при проектировании следует выполнять оценку собственных резонансных частот элементов конструкций. Для расчётной оценки резонансных частот прямоугольных пластин, подобием которых являются плоские корпуса микросхем и несущие платы, для разных способов закрепления применяется расчётное выражение следующего вида [16]:
f = B∙h∙104/a2, (6.16)
в котором приняты следующие обозначения:
f — частота собственных колебаний пластины, Гц;
В — частотная постоянная, определяемая вариантом закрепления пластины на несущем основании (корпуса ИС на плате или несущей платы на конструктивном элементе более высокого уровня) согласно рисунку 6.33, см/сек;
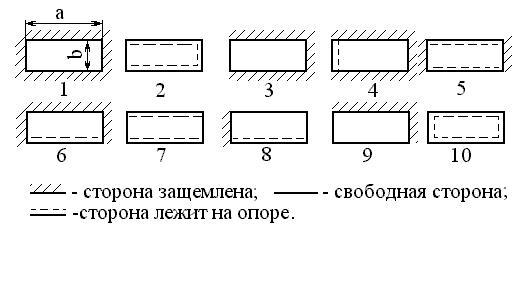
Рисунок 6.24
h — толщина пластины (тела корпуса ИС или несущей платы), см;
а — линейный размер пластины, см;
F — частотный коэффициент, численное значение которого определяется модулем упругости Е, плотностью ρ и коэффициентом Пуассона μ материала пластины, учитывающими упругие свойства и массу пластины по выражению
F = √[E∙/48∙π2∙ρ(1–μ2)].
Значения коэффициента В в зависимости от отношения плоскостных размеров а и b и варианта закрепления стальной пластины приведены в таблице 6.3.
Таблица 6.3
|
Вариант закрепления
|
Отношение сторон пластины a/b | |||||||
|
0,25 |
0,5 |
1,0 |
1,5 |
2,0 |
2,5 |
3,0 |
4,0 | |
|
1 |
54 |
58 |
86 |
145 |
234 |
352 |
497 |
868 |
|
2 |
40 |
41 |
56 |
84 |
124 |
176 |
240 |
864 |
|
3 |
10 |
19 |
58 |
124 |
217 |
336 |
479 |
855 |
|
4 |
33 |
44 |
76 |
139 |
230 |
349 |
494 |
866 |
|
5 |
54 |
56 |
69 |
93 |
131 |
181 |
244 |
406 |
|
6 |
54 |
58 |
76 |
115 |
175 |
254 |
353 |
607 |
|
7 |
8 |
16 |
38 |
70 |
112 |
165 |
230 |
394 |
|
8 |
9 |
10 |
13 |
18 |
23 |
28 |
33 |
43 |
|
9 |
9 |
11 |
18 |
28 |
43 |
62 |
85 |
144 |
|
10 |
25 |
29 |
47 |
76 |
117 |
170 |
234 |
375 |
При исполнении пластины из иного материала (или композиции материалов) в формулу следует вводить поправочный коэффициент kм на учет свойств материала:
kм = √[Е∙ρc/(Ес∙ ρ)],
где параметры с индексом с соответствуют стали, а без индекса — её заменителю. Значения коэффициента kМ для ряда материалов приведены в таблице 6.4. В случае дополнительного равномерного нагружения пластины иными, закреплёнными на ней элементами в расчётах учитывается весовой поправочный коэффициент kВ определяемый по формуле
kВ = 1/√[1 + QН/Qп],
где QН — вес дополнительных элементов;
Qп — вес исходной пластины.
Таблица 6.4
|
Материал |
Сталь |
Молиб- ден |
Сплавы магние-вые |
Сплавы алюми- ниевые |
Титан |
Гети- накс |
Смола эпок- сидная |
Смола феноль- ная |
|
kМ |
1 |
1,1 |
0,97 |
0,95 |
0,93 |
0,54 |
0,52 |
0,47 |
С учётом поправочных коэффициентов выражение (6.16) представляется в следующем виде:
f = kМ∙ kВ∙В∙h∙104/a2.
По необходимости оценка резонансной частоты композиции элементов, характеризующихся собственными частотами fi, выполняется по выражению предложенному Дункерлем:
1/f2 = ∑ 1/fi2.
При ударных механических воздействиях характер движения колебательной системы определяется её собственными параметрами и вынужренным смещением несущей основы, на которую совершено воздействие. Полагается, что импульс смещения основы характеризуется длительностью tИ и представляется в форме одиночного импульса синусоидальной полуволны:
х = А∙sin w∙τ,
где 0 ≤ τ ≤ tИ;
w — «эквивалентная частота», равная π/tИ;
А — амплитуда смещения основы конструкции.
Такой форме воздействия соответствует скачкообразное изменение скорости перемещения основы в начале и в конце импульса до значения ±A∙w и нарастание по синусоидальному закону ускорения от нуля до максимального значения A∙w2 при tИ/2. Импульс в первом приближении образуется из трёх равных по длительности частей: двух фронтов и плоской вершины максимума смещения.
Кратковременное (ударное) воздействие силы на корпус микросхемы в области упругих деформаций сопровождается нарастанием механических напряжений в элементах её монтажа и возбуждением затухающих свободных колебаний корпуса. Если удар одиночный, то максимальные деформации элементов конструкции достигаются на первом полупериоде свободных колебаний, где вынужденное и амплитудное значение деформации для свободных колебаний совпадают и суммируются. В последующих периодах свободные колебания затухают и на плоской вершине импульса воздействия напряжение в материале определяется приложенной силой (максимумом ускорения).
Исследование развития реакции колебательной системы на ударное воздействие показывает, что для исключения «подпитки» собственных колебаний необходимо, чтобы длительность ударного импульса tИ при любых значениях коэффициента демпфирования соответствовала неравенствам при
tИ/t0 < 0,3; tИ/t0 > 1,3,
где t0 — период собственных колебаний конструкции. При малой длительности удара колебательный объект не успевает «разгоняться», а при большой длительности снижается вынуждающая амплитуда скачка скорости перемещения основы. Следовательно, для ослабления действия ударов необходимо при известной длительности удара приводить в соответствие резонансную частоту колебательной системы по неравенствам
w0 ≤ 0,6∙π/ tИ; w0 ≥ 2,6∙π/ tИ.
При многократных ударах интервал между ударами сравним или превышает длительность удара. При низкой частоте собственных колебаний конструкции короткие, но частые удары обеспечивают накопление энергии и способны «разгонять» собственные колебания в системе. Поэтому при многократных ударах необходимо, чтобы период ударов в 1,3–1,5 раз превышал период собственных колебаний возбуждаемой системы при скважности более 4–5 или следует обеспечивать выбор повышенных собственных частот системы с тем, чтобы к установлению вынуждающего смещения основы свободные колебания в системе снизились до допустимого 10–20 % значения. При этом, если в первом случае (при низкой частоте собственных колебаний) преобладают деформации, определяемые собственными колебаниями системы, то во втором варианте выбора (при высокой частоте собственных колебаний) преобладающими являются вынужденные деформации колебательной системы.
Аналогичное заключение справедливо для амортизированных конструкций, для которых в качестве параметра t0 принимается период их собственных колебаний системы амортизации.
Общая картина реакции конструкций на механические воздействия достаточно сложна и приведенные сведения позволяют лишь обозначить основные аспекты подходов к оценке этой картины. Для снижения порождаемых механическими воздействиями деформаций в конструкциях микроэлектронных устройств, и микросхемах в частности, рекомендуется ряд мер по их защите:
выбор и приведение в соответствие резонансных частот элементов конструкций как по действию вибраций, так и по действию ударов;
применение мер демпфирования собственных колебаний элементов конструкций (установка поглощающих эластичных прокладок между колеблющимися поверхностями, приклеивание, заполнение полостей компаундами, применение дополнительных элементов крепления и пр.);
в случае необходимости применение амортизаторов с поглотителями энергии механических колебаний и приведение их собственных частот в соответствие с собственными частотами защищаемых объектов.
Развитию усталостных разрушений способствуют температурные деформации, возникающие при изменении температуры во время эксплуатации, а также остаточные температурные деформации в результате нагрева в процессе выполнения операции соединения.
Наименее стойкими к вибрационным воздействиям являются соединения стеклом, обладающие хрупкостью и пониженной прочностью на растяжение.