

•Передаточная функция контура регулирования момента относительно момента
|
|
|
|
Kп Kд1 |
(Tом p 1) |
|
|
|
|
|
Wм( p) |
|
|
|
C |
|
|
|
|
|
|
|
|
(Tп p 1) (Tэ p 1) (Tом p 1) |
Kп Kд1 Kом |
|
|
|||||
|
|
|
||||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
C |
|
|
|
|
Её числитель, вектор коэффициентов характ. полинома, |
||||||||||
сам характ. полином и его производная по |
|
|
|
|
||||||
переменной р |
|
Kп Kд1 Kом |
|
|
|
|||||
|
1 |
|
|
|||||||
|
|
|
|
Kп |
|
C |
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
Bм( p) |
C Kд1 (Tом p 1) |
aм |
Tп Tэ Tом |
|
|
|||||
|
|
|
|
|
Tп (Tэ Tом) Tэ Tом |
|
||||
|
|
|
|
|
|
Tп Tэ Tом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Aм( p) aм3 p3 aм2 p2 aм1 p aм0 |
Sм( p) |
d |
|
Aм( p) |
|
dp |
|||||
|
|
|
|||

Установившееся значение момента отсечки
M0 Uзм Bм(0) |
M0 59 |
Aм(0) |
|
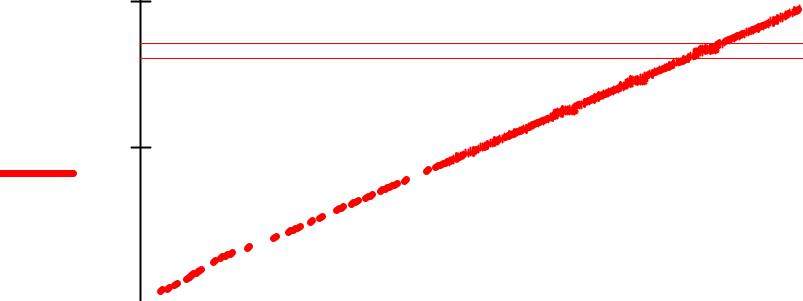
Переходная функция и переходная характеристика
|
|
|
2 |
Bм pмk exp pмk t |
|
M(t) M0 |
Uзм Re |
|
|
|
|
|
pмk Sм pмk |
|
|||
|
|
k 0 |
|
|
|
100
рад/с
75
M(t) 50
25
1.05 M0
0.95 M0
0 |
0.1 |
0.2 |
t

•Передаточная функция контура регулирования момента относительно скорости и изображение скорости
|
|
|
|
|
|
|
|
|
|
Kп Kд1 (Tом p 1) |
|
|
|
|
|
|
|
|||
W ( p) |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
Kд2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
(Tп p 1) (Tэ p 1) (Tом p 1) |
Kп Kд1 |
Kом |
Tм p |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kп |
|
|
|
|
|
|
|
|
|
( p) |
|
|
|
|
|
|
|
|
|
Uзм C (Tом p |
1) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Kп Kд1 Kом |
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
(Tп p 1) (Tэ p 1) (Tом p 1) |
|
C |
|
Tм |
p |
||||||||||
Составляющая скорости, определяемая простыми |
|
|
||||||||||||||||||
полюсами передаточной функции |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
Uзм Kд2 |
|
2 |
Bм pмk exp pмk |
t |
|
|
|
|
|||||
1(t) |
|
|
|
Re |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Tм |
pмk |
2 |
Sм pмk |
|
где |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
k 0 |
|
|
|
|
|
|
|
|
|
|
|

S ( pм) ddpм Aм( pм) pм2
Составляющая скорости, определяемая нулевыми полюсами кратности 2 передаточной функции
|
|
Uзм Kд2 |
d |
|
Bм( p) exp( p t) |
|
|
2 |
(t p) |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Tм |
|
|
Aм( p) |
||
|
|
dp |
|
||||
Переходная функция и переходная характеристика
(t) 1(t) 2(t 0)
200
0 |
161.315 |
(t) 100
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
t
Ожидаемые результаты:
•Оба контура регулирования всегда устойчивы.
•Запасы устойчивости по амплитуде и фазе – конечные величины

Двухконтурная ЭМС с компенсациями влияния момента на скорость и скорости на момент (вариант 5)
• Контур регулирования момента
Uзм |
|
|
|
M |
Mст |
|
ω |
|
W |
(p) |
|
Wд2(p) |
|||
|
Uом |
п׳ |
|
|
|
|
|
|
Wом(p) |
|
|
|
|
||
|
|
|
|
|
|
||
• Контур регулирования скорости
Uзω |
1/Wп(p) |
|
Mст |
|
|
Wп(p) |
M |
Wд2(p) |
ω |
||
|
|
|
|
||
|
Wос(p) |
|
|
|
|
Контур регулирования момента исследуется аналогично варианту 3
Ожидаемые результаты:
•Контур регулирования момента всегда устойчив, контур регулирования скорости может быть устойчивым и неустойчивым в зависимости от заданных параметров.
•Запасы устойчивости по амплитуде и фазе к контуре регулирования момента – конечные величины, запас по амплитуде в устойчивом контуре регулирования скорости – бесконечный.
•Переходные характеристики контура регулирования момента и контура регулирования скорости имеют колебательный характер.

Структуры и анализ ЭМС, следящих за перемещением
Двухконтурная ЭМС, следящая за перемещением с ОС по моменту без компенсационных обратных связей (вариант 7)
Lвх |
|
U |
|
Mст ω |
|
L |
|
Kδ |
зм |
W (p) M |
Wд2(p) |
Wм(p) |
вых |
||
|
W (p) |
|
|||||
|
|
п |
д1 |
|
|
|
|
|
|
Uом |
Wом(p) |
|
|
|
|
|
|
|
|
|
|
|

•Анализ контура регулирования момента проводится
также, как в варианте 1
•Структурная схема для контура, следящего за перемещением и её преобразование
|
Mст |
|
|
|
|
1/ W (p)W |
(p) |
1/Wп(p) |
|
|
п д1 |
|
|
Lвых |
Lвх |
Kδ |
|
Wп(p) Wд1(p) Wд2(p) |
|
|
|
Wм(p) |
Mст
1/ Wп(p)Wд1(p)
Lвх 


 Kδ
Kδ 


 Wэкв(p)
Wэкв(p) 

 Wм(p) Lвых
Wм(p) Lвых

Здесь
Ожидаемые результаты:
•Контур регулирования момента всегда устойчив, контур слежения за перемещением - неустойчив.
•Запасы устойчивости по амплитуде и фазе к контуре регулирования момента – конечные величины,