

Г л а в а 4 дискретизация и квантование непрерывных сообщений
4.1. Основные понятия и определения
Переход от аналогового представления сигнала к цифровому, который дает в ряде случаев значительные преимущества при передаче, хранении и обработке информации, связан с дискретизацией сигнала х(t) по времени и с квантованием по уровню.
Рассмотрим разновидности сигналов, которые описываются функцией х(t).
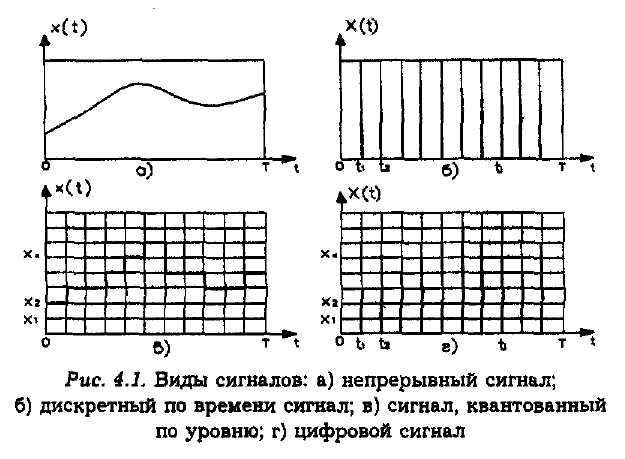 Рис.
4.1.
Виды сигналов: а) непрерывный сигнал;
Рис.
4.1.
Виды сигналов: а) непрерывный сигнал;
б) дискретный по времени сигнал; в) сигнал, квантованный по уровню;
г) цифровой сигнал
Непрерывная функция непрерывного аргумента (непрерывный сигнал, рис. 4.1а). В этом случае значения, которые может принимать функция x(t)и аргумент t, заполняют конечные (или бесконечные) промежутки [0, X] и [0, T] соответственно.
Непрерывная функция дискретного аргумента (дискретный во времени сигнал, рис. 4.1б). Здесь значения функции x(t) определяются лишь на дискретном множестве значений аргумента ti,i=0, 1, 2, …, (0<t<T).
Дискретная функция непрерывного аргумента (квантованный по уровню сигнал, рис. 4.1в). В этом случае значения, которые может принимать функция x(t), образуют дискретный ряд чисел x1,x2, …,xk, …, т.е. такой конечный или бесконечный ряд, в котором каждому числу можно поставить в соответствие интервал (ak,bk), внутри которого других чисел данного ряда нет. Значение аргумента t может быть любым на отрезке [0, T].
Дискретная функция дискретного аргумента (цифровой сигнал, рис. 4.1г). Значения, которые могут принимать функция x(t) и аргумент t, образуют дискретные ряды чисел x1,x2, …,xk, … и t0,t1,t2, …,ti, …, заполняющие отрезки [0, X] и [0, T]соответственно.
Дискретизация состоит в преобразовании сигнала x(t) непрерывного аргумента tв сигнал x(ti) дискретного аргумента ti.
Квантование по уровню состоит в преобразовании непрерывного множества значений сигнала x(ti) в дискретное множество значений xk,k=0, 1, 2, …,m-1.
Совместное применение операций дискретизации и квантования позволяет преобразовать непрерывный сигнал x(t) в дискретный по координатам x и t.
Применительно к детерминированной функции рассмотрим сущность понятия дискретизации сигнала x(t).
Дискретизация реализации сигнала x(t) связана с заменой промежутка изменения независимой переменной некоторым множеством точек, т.е. операции дискретизации соответствует выражение:
x(t) x(ti), (4.1)
где x(t) – функция, описывающая сигнал;
x(ti) – функция, описывающая сигнал в результате дискретизации.
Следовательно, в результате дискретизации исходная функция x(t)заменяется совокупностью отдельных значений x(ti).
По значениям функции x(ti) можно восстановить исходную функцию x(t) с некоторой погрешностью. Функцию, полученную по результатам восстановления (интерполяции) по значениям x(t), будем называть воспроизводящей и обозначим через V(t).
Воспроизводящая функция V(t) строится как взвешенная сумма некоторого ряда функций f(t–tk):
V(t) = akf(t – tk), (4.2)
k
причем коэффициенты akзависят от отсчетов x(ti),x(ti-1), …
При обработке сигналов дискретизация по времени должна производиться таким образом, чтобы по отсчетным значениям x(ti) можно было получить воспроизводящую функцию V(t), которая с заданной точностью отображает исходную функцию x(t).
При дискретизации сигналов приходится решать вопрос о том, как часто следует производить отсчеты функции, т.е. каков должен быть шаг дискретизации ti=ti–ti-1.
При малых шагах дискретизации ti количество отсчетов функции на отрезке обработки будет большим и точность произведения – высокой. При больших tiколичество отсчетов уменьшится, но при этом, как правило, снижается точность восстановления.
Оптимальной является такая дискретизация, которая обеспечивает представление исходного сигнала с заданной точностью при минимальном количестве выборок. В этом случае все отсчеты существенны для восстановления исходного сигнала. При неоптимальной дискретизации кроме существенных отсчетов имеются и избыточные отсчеты.
Избыточные отсчеты не нужны для восстановления сигнала с заданной точностью. Они загружают тракт передачи информации, отрицательно сказываются на производительности обработки данных ЭВМ, вызывают дополнительные расходы на хранение и регистрацию данных. В связи с этим актуальна задача сокращения избыточности данных. Сокращение избыточности для получателя информации может производиться в процессе дискретизации сигналов. В более общем плане задача сокращения избыточных отсчетов может рассматриваться как задача описания непрерывных сигналов с заданной точностью минимальным числом дискретных характеристик.