

3.2. Математическое описание системы управления.
Составим математическое описание системы управления, учитывая основные функциональные блоки.
Для аппаратуры выделения координат передаточная функция имеет вид:
 ,
,
где:
![]() =
1 В/м.А;
=
1 В/м.А;![]() = 0.012 с;
= 0.012 с;![]() = 0,5.
= 0,5.
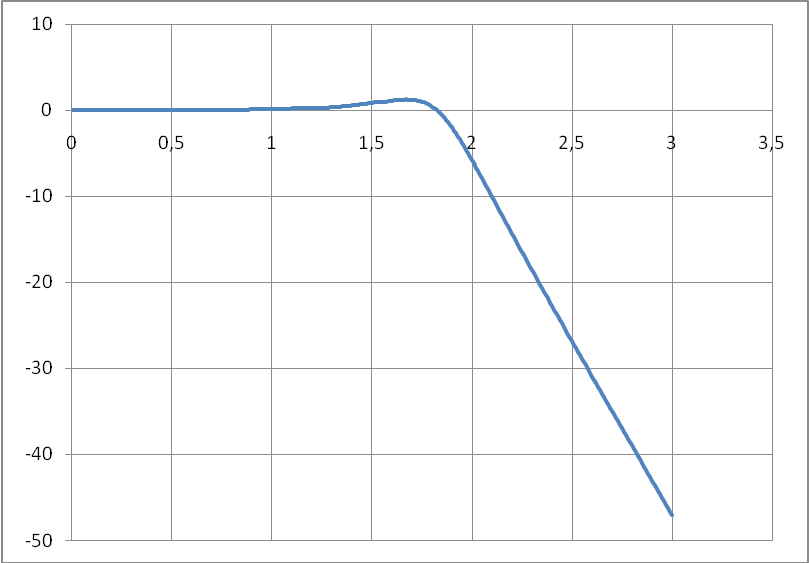
Рисунок 5. Амплитудно-частотная характеристика АВК.

Рисунок 6. Фазовая частотная характеристика АВК.
Передаточная функция корректируещего фильтра:
 ,
,
где:
![]() =
0.27 с;n
= 6.
=
0.27 с;n
= 6.

Рисунок 7. Амплитудно-частотная характеристика КФ.

Рисунок 8. Фазовая частотная характеристика корректирующего фильтра.
Для рулевого привода запишем:
 ,
,
где:
![]() =
0,006 с;
=
0,006 с;![]() =
60/В;
=
60/В;

Рисунок 9. Амплитудно-частотная характеристика рулевого привода.

Рисунок 10. Фазовая частотная характеристика рулевого привода.
Суммарные частотные характеристики контура управления представлены на рисунках:

Рисунок 11. Амплитудно-частотная характеристика контура управления.

Рисунок 12. Фазовая частотная характеристика контура управления.
По построенным ЛАФЧХ определим запас по амплитуде и запас по фазе.:
Запас по амплитуде равен 14,4 Дб, а запас по фазе 33,2 градуса.
Выбор угла фазирования:
Угол фазирования предназначен для компенсации запаздывания вращения рулевого привода на частоте вращения объекта. В нашем случае он задается разворотом крыла с трассером относительно осей поворота рулей. Положив для начала его равным нулю, мы обнаружили, что его можно принять именно таким, если постоянная времени АВК буде равна 0,012 мс. При этом вносимый ею в сигнал крена фазовый сдвиг в сумме со сдвигом РП составляет 90 градусов, что приводит к необходимости инвертировать сигнал крена в одном из каналов модуляции.
Выбор параметров корректирующего фильтра.
Для обеспечения устойчивости системы необходимо обеспечить фазовое опережение ФЧХ над уровнем -1800 в районе частоты среза системы управления. Это достигается применением корректирующего фильтра. В качестве корректирующего фильтра выберем, построив логарифмическую амплитудно-фазовую частотную характеристику, показанную на рисунках 7,8, дифференцирующий фильтр с разносом n=6, обеспечивающий максимальное фазовое опережение 450. Постоянная времени выбирается в соответствии с характеристиками объекта и в данном случае составляет 0.27 секунды.
Результаты построения ЧХ получены при помощи программы расчета, составленной в среде VB6. Все необходимые графики выводятся на экран компьютера, что позволяет менять параметры в интерактивном режиме, и достаточно быстро обеспечить их целенаправленный подбор.
Параметры ракеты в задании на проектирование заданы постоянными (метод замороженных коэффициентов), что позволило обеспечивать наилучшие характеристики системы управления. Основной параметр разработки – коэффициент передачи системы управления КСУ = 6 град/м. В совокупности с коэффициентом передачи ракеты по перегрузке КСНV = 6,1 м/(сек2 град) это обеспечивает коэффициент по разомкнутому контуру системы управления [7]
КР = 36,6 1/с2.
При таком коэффициенте динамическая ошибка от действия ускорения свободного падения составит
hД = 9,81 / 36,6 = 0,27 м.
Такая ошибка не требует подбора команды компенсации веса ракеты, поскольку такой промах не влияет на вероятность попадания ракеты в цель.