

Московский технический университет связи и информатики
Кафедра защиты информации техники почтовой связи
Курсовая работа по курсу
“Теория автоматического управления”
вариант №19
Выполнил: Фисенко П.А.
Шифр специальности: 210100
Группа: УИ0301
Принял: Князютенков В.А.
Москва, 2005
Оглавление
1. Функциональная схема САУ. Задание…………………………………..………3
2. Анализ датчиков давления……………………………………………….....….…5
3. Расчетная часть………………………………………………………………......16
3.1. Уравнение передаточной функции всей САР..................................................16
3.2. Характеристическое уравнение.........................................................................17
3.3. Проверка устойчивости системы по критерию Рауса-Гурвица…….………17
3.4. Проверка устойчивости системы по критерию Михайлова……...…..……..19
3.5. Определение статической и скоростной ошибки……………….…..………21
4. Оценка показателей точности работы САР……………………………..……..21
4.1. Частотные критерии качества переходных процессов………..…….………21
4.2. Корневые критерии качества переходных процессов………..…….………..22
Список литературы………………………………………………………...……….24
1. Функциональная схема сау. Задание
Спроектировать систему автоматического регулирования. Регулирующая величина – давление воздуха или жидкости в трубопроводе. Функциональная схема изображена на рисунке 1.1.
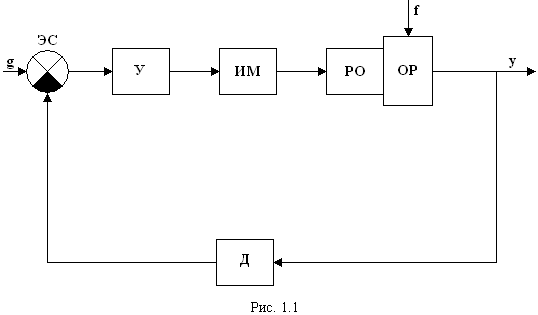
На схеме приняты следующие обозначения:
g - задающая величина;
у - регулируемая величина (давление воздуха или жидкости в трубопроводе);
f - возмущающее воздействие;
ОР - объект регулирования;
РО - регулирующий орган;
ИМ - исполнительный механизм;
У - усилитель;
Д- датчик регулируемой величины;
ЭС - элемент сравнения.
Расчетная часть
1. Составить уравнение передаточной функции всей САР и характеристическое уравнение.
2. Проверить устойчивость системы по критерию Рауса-Гурвица.
3. Проверить устойчивость по критерию Михайлова (или Найквнста).
4. Переходная характеристика объекта регулирования совместно с РО.
5. Определить статистическую и скоростную ошибку в системе.
6. Произвести оценку показателей точности работы САР, рассчитав 2-3 крите-рия качества переходных процессов.
Исходные данные
Передаточная функция ОР совместно с РО:

где:
k1 = 0,12; Т1 =0,4; Т2 =0,3
Передаточная функция ИМ:

где:
k2 = 0,15
Передаточная функция У:
WУ(P) = k 3;
где:
k3 = 10
Передаточная функция Д:

где:
Т3 = 0,018
2. Анализ датчиков давления для измерения заданной
регулируемой величины
Проанализируем различные виды датчиков, измеряющих давление.
2.1 Струнные датчики
Назначение и принцип действия
Для измерения неэлектрических величин применяется частотный метод, при котором измеряемая величина преобразуется в переменное напряжение, частота которого зависит от этой величины. Достоинством частотного метода измерения является то, что в процессе передачи и дальнейшей обработки частотного выходного сигнала не возникает дополнительной погрешности. Действительно, если выходным сигналом датчика является напряжение, то при передаче такого сигнала на расстояние происходит падение напряжения на проводах линии связи. Если выходным сигналом датчика является, например, сопротивление, то к нему добавляется сопротивление проводов или линий связи. А в частотном методе измерения наличие сопротивления проводов линии связи и внутреннего сопротивления измерительного прибора не изменяют частоту сигнала. Еще одним достоинством частотного сигнала является удобство преобразования его в цифровой код. Это особенно важно в связи с развитием в последнее время цифровых измерительных приборов и применением в автоматике цифровых вычислительных машин.
Наибольшее развитие для преобразования неэлектрических величин в частоту получили струнные датчики. Принцип действия струнного датчика основан на зависимости собственной частоты колебаний натянутой струны длиной l и массой m от силы натяжения F:
![]()
Струнные датчики используются в приборах для измерения силы, давления, расхода, температуры и др. При воздействии на струну измеряемой силы струна практически не растягивается, поэтому первичный преобра-зователь (например, мембрана в датчик давления) работает, почти не деформируясь. Это обстоятельства существенно снижает погрешность измерения из-за механического гистерезиса и упругого последействия материала первичного преобразователя.
Струнный датчик (рис. 1.1) состоит из струны 1 возбудителя 2 и приемни-ка 3. Одним концом струна жестко закреплена, а другим концом соединена с первичным преобразователем, например мембраной 4 па рис 1. При изменении давления Р изменяется сила натяжения струны. С помощью возбудителя 2, которым может быть электромагнит, струна выводится из состояния равновесия и начинает колебаться с частотой f, определяемой давлением Р. Приемник 3 преобразует перемещение струны с частотой f в электрический сигнал такой же частоты. В качестве приемника 3 может использоваться индуктивный, емкостный или любой другой датчик.
 -вроде
это не надо!?
-вроде
это не надо!?
Рис. 1.1. Струнный датчик для измерения давления
На практике чаще всего применяют электромагнитный датчик. Дело в том, что он может попеременно выполнять функции то возбудителя, то пpиемника. Когда на его обмотку подается напряжение, то он создает электромагнитную силу притяжения струны и возбуждает ее колебания. А когда струна уже колеблется, то с этой же обмотки снимается переменное напряжение, частота которого равна частоте колебаний струны.
Струнные датчики используются в двух режимах: автогенераторном и в режиме работы по запросу. В первом случае струна постоянно колеблется, а во втором – работает в более легких условиях, срок службы ее увеличивается и датчик получается несколько проще.