

-
Механика – это наука, изучающая механическое движение материальных объектов, то есть их взаимное перемещение в пространстве и во времени.
Неклассическая механика - это действительно часть физики, в которой исследуются объекты микро- и макромира с учетом пространственно-временной зависимости.
Классическая механика имеет дело с объектами, протяженность которых приблизительно и с точностью до нескольких порядков заключена в интервале от 10-10 до 1010 метра. При их изучении свойства пространства и времени можно считать постоянными.
-
Тело отсчета, связанная с ним система координат и часы для отсчета времени движения образуют систему отсчета. Тело отсчета - это тело, относительно которого определяется положение других (движущихся) тел.
Неинерциальная система отсчёта — система отсчета, в которой не выполняется первый закон Ньютона — «закон инерции», говорящий о том, что каждое тело, в отсутствие действующих на него сил, покоится либо движется по прямой и с постоянной скоростью. Всякая система отсчета, движущаяся с ускорением или поворачивающаяся относительно инерциальной, является неинерциальной. Второй закон Ньютона также не выполняется в неинерциальных системах отсчёта. Для того, чтобы уравнение движения материальной точки в неинерциальной системе отсчёта по форме совпадало с уравнением второго закона Ньютона, дополнительно к «обычным» силам, действующим в инерциальных системах, вводят силы инерции.
Инерциальная система отсчёта (ИСО) — система отсчёта, в которой все свободные тела движутся прямолинейно и равномерно или покоятся. Эквивалентной является следующая формулировка, удобная для использования в теоретической механике: «Инерциальной называется система отсчёта, по отношению к которой пространство является однородным и изотропным, а время — однородным». Законы Ньютона, а также все остальные аксиомы динамики в классической механике формулируются по отношению к инерциальным системам отсчёта.
3. Положение точки в пространстве можно задать двумя способами:
1) с помощью координат,
2) с помощью радиус-вектора. В первом случае положение точки определяется на осях декартовой системы координат ОХ, OY, OZ, связанных с телом отсчета (рис. 3). Для этого из точки А необходимо опустить перпендикуляры на плоскость YZ (координата х), XZ (координата / у), XY (координата г) соответственно. Итак, положение точки можно определить записи А (х, у, г), а для случая, изображенного на рис. С (х = 6, у = 10, z - 4,5), точка А обозначается следующим образом: А (6, 10, 4,5) Наоборот, если заданы конкретные значения координат точки в данной системе координат, то для изображения точки необходимо отложить значения координат на соответствующие оси и па трех взаимно перпендикулярных отрезках построить параллелепипед. Его вершина, противоположная началу координат О и размещена на диагонали параллелепипеда, и является точкой А.
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением. Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Ускорение — производная скорости по времени, векторная величина, показывающая, на сколько изменяется вектор скорости точки (тела) при её (его) движении за единицу времени (то есть ускорение учитывает не только изменение величины скорости, но и её направления).
Скорость — векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчёта
Нормальное
ускорение – это составляющая
вектора ускорения, направленная вдоль
нормали к траектории движения в данной
точке на траектории движения тела. То
есть вектор нормального ускорения
перпендикулярен линейной скорости
движения. Нормальное ускорение
характеризует изменение скорости по
направлению и обозначается буквой ![]() n.
Вектор нормального ускорения направлен
по радиусу кривизны траектории.
n.
Вектор нормального ускорения направлен
по радиусу кривизны траектории.
Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.
Направление
вектора тангенциального ускорения ![]() τ совпадает
с направлением линейной скорости или
противоположно ему. То есть вектор
тангенциального ускорения лежит на
одной оси с касательной окружности,
которая является траекторией движения
тела.
τ совпадает
с направлением линейной скорости или
противоположно ему. То есть вектор
тангенциального ускорения лежит на
одной оси с касательной окружности,
которая является траекторией движения
тела.
4. За вектор углового ускорения ε при вращении тела вокруг неподвижной точки принимают вектор, который характеризует изменение угловой скорости ω в данный момент как по числовой величине, так и по направлению. Такой характеристикой является производная по времени от вектора угловой скорости ω
Вектор ω направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор dφ. Размерность угловой скорости ω = Т-1, а ее единица — радиан в секунду (рад/с).
5. Степени свободы — это совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела (а вместе с их производными по времени — соответствующими скоростями - полностью определяющая состояние механической системы или тела - то есть их положение и движение)
Мгновенная ось врещения-прямая, неподвижная в данный момент в некоторой инерциальной системе отсчёта, относительно которой_сложное движение твёрдого тела в этот момент можно представить как вращательное вокруг этой прямой. Мгновенная ось вращения может лежать как внутри тела, так и вне его. С течением времени положение М. о. в. Изменяется относительно как неподвижной системы отсчёта, так и системы отсчёта, движущейся вместе с телом.
6. Принцип относительности Галилея гласил: "Законы механики в системе координат, движущейся равномерно и прямолинейно в пространстве, имеют тот же вид, что и в системе координат, покоящейся в пространстве".Из этого постулата можно сделать простой вывод, а именно: существует бесконечно много эквивалентных систем координат, называемых инерциальными и совершающими равномерное и прямолинейное движение или покоящихся друг относительно друга. В этих системах законы механики выполняются в простой классической форме.
Преобразование Лоренца (лоренцево преобразование) псевдоевклидова аффинного пространства — это аффинное преобразование, сохраняющее расстояние между точками этого пространства (это расстояние определяется как длина вектора, соединяющего данные точки, с помощью индефинитного скалярного произведения).
7. Относительность одновременности. Пусть в системе К в точках с координатами x1 и x2 в моменты времени t1 и t2происходят два события. В системе К' им соответствуют координаты x'1 и x'2 и моменты времени t'1 и t'2. Если события в системе К происходят в одной точке (x1 = x2) и являются одновременными (t1 = t2), то, согласно преобразованиям Лоренца,
 т.е.
эти события являются одновременными и
пространственно совпадающими для любой
инерциальной системы отсчета.
т.е.
эти события являются одновременными и
пространственно совпадающими для любой
инерциальной системы отсчета.
Темп хода движущихся часов -длительность события, происходящего в некоторой точке, наименьшая в той инерциальной системе отсчета, относительно которой эта точка неподвижна. Следовательно, часы, движущиеся относительно инерциальной системы отсчета, идут медленнее покоящихся часов, т.е. ход часов замедляется в системе отсчета, относительно которой часы движутся.
Длина движущегося тела-лоренцево сокращение длины тем больше, чем больше скорость движения
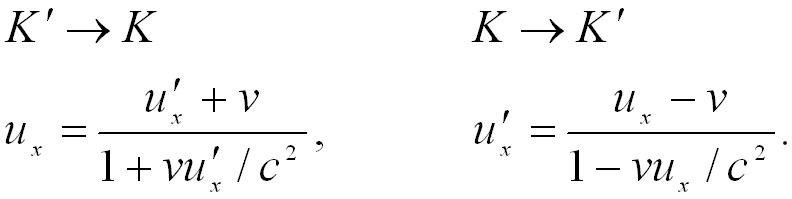
Сложение скоростей Если скорости v, u'x, ux малы по сравнению со скоростью света, то эти формулы переходят в привычный закон сложения скоростей в классической механике. Релятивистский закон сложения скоростей не противоречит второму постулату Эйнштейна: если u'x = c то ux = c, т.е. скорость с – предельная скорость, которую невозможно превысить.
8. Фундаментальные взаимодействия — качественно различающиеся типы взаимодействия элементарных частиц и составленных из них тел.
На сегодня достоверно известно существование четырёх фундаментальных взаимодействий: гравитационного электромагнитного сильного слабого.
9.
Импульс (Количество
движения) — векторная физическая
величина, являющаяся мерой механического
движения тела. В классической
механике импульс тела равен
произведению массы m этого
тела на его скорость v,
направление импульса совпадает с
направлением вектора скорости:
![]()
Масса- Мера инертности тел. Скаляр. Величина агитивная
Первый закон Ньютона - Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальные точки, когда на них не действуют никакие силы (или действуют силы взаимно уравновешенные), находятся в состоянии покоя или равномерного прямолинейного движения.
Второй закон Ньютона - В инерциальной системе отсчёта ускорение, которое получает материальная точка с постоянной массой, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе.
При
подходящем выборе единиц
измерения,
этот закон можно записать в виде
формулы:![]() где
где ![]() — ускорение материальной
точки;
— ускорение материальной
точки;![]() —
равнодействующая всех сил,
приложенных к материальной
точке;
—
равнодействующая всех сил,
приложенных к материальной
точке;![]() — масса материальной
точки.
— масса материальной
точки.
Третий
закон Ньютона- Материальные
точки взаимодействуют друг с другом
силами, имеющими одинаковую природу,
направленными вдоль прямой, соединяющей
эти точки, равными по модулю и
противоположными по направлению:
![]()
10. Момент импульса - характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Момент силы — векторная физическая величина, равная векторному произведению радиус-вектора (проведённого от оси вращения к точке приложения силы — по определению) на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Уравнение моментов
Производная момента импульса относительно некоторой оси по времени равна моменту действующей на материальную точку силы относительно той же оси (уравнение моментов).Или момент инерции твердого тела, умноженный на вторую производную от угла (угловое ускорение) равен сумме моментов сил, действующих на тело.
11. Центр масс —геометрическая точка, характеризующая движение тела или системы частиц, как целого. Положение центра масс (центра инерции) системы материальных точек в классической механике определяется следующим образом:
где ![]() — радиус-вектор центра
масс,
— радиус-вектор центра
масс, ![]() —
радиус-вектор i-й
точки системы,
—
радиус-вектор i-й
точки системы, ![]() — масса i-й
точки.
— масса i-й
точки.
13. Мерой действия силы при превращении механического движения в другую форму движения является работа силы.
Работа постоянной по модулю и направлению силы F на прямолинейном перемещении s ее точки приложения равна
![]()
Если угол α острый, то работа силы положительна, если тупой – отрицательна.
Если направления силы и перемещения совпадают (α=0), то A = Fs;
Если направление силы перпендикулярно направлению перемещения (α=90◦), то А = 0;
Если направление силы противоположно направлению перемещения (α=180◦), то A = -Fs.
Кинетическая энергия- энергия движущегося тела Ек= mV^2/2
Силовое поле— это векторное поле в пространстве, в каждой точке которого на пробную частицу действует определённая по величине и направлению сила (вектор силы).
Технически различают (как это делается и для других видов полей)
-стационарные поля, величина и направление которых могут зависеть исключительно от точки пространства (координат x, у, z), и
-нестационарные силовые поля, зависящие также от момента времени t.
Также
-однородное силовое поле, для которого сила, действующая на пробную частицу, одинакова во всех точках пространства и
-неоднородное силовое поле, не обладающее таким свойством.
Наиболее простым для исследования является стационарное однородное силовое поле, но оно же представляет собой и наименее общий случай.
Полем сил называют область пространства, в каждой точке которого на помещенную туда частицу действует сила, закономерно меняющаяся от точки к точке
Работа, которую совершают силы поля при перемещении частицы из точки 1 в точку 2, зависит, вообще говоря, от пути. Однако среди стационарных силовых полей имеются такие, в которых эта работа не зависит от пути между точками 1 и 2.
14. Потенциальная энергия зависит от положения тела. В зависимости от того, куда мы будем (чуть-чуть) смещаться от данной точки, потенциальная энергия будет либо уменьшаться, либо увеличиваться. Вот здесь и живет связь между потенциальной энергией и силой. Сила показывает направление, в котором потенциальная энергия уменьшается быстрее всего, а величина силы определяется скоростью изменения. Другими словами, сила - градиент потенциальной энергии.
Потенциальная энергия принимается равной нулю для некоторой конфигурации тел в пространстве, выбор которой определяется удобством дальнейших вычислений. Процесс выбора данной конфигурации называется нормировкой потенциальной энергии.
16. Эквивалентность массы и энергии — физическая концепция теории относительности, согласно которой полная энергия физического объекта (физической системы, тела) равна его (её) массе, умноженной на размерный множитель квадрата скорости света в вакууме:
17. Классическая теория тяготения Ньютона (Закон всемирного тяготения Ньютона) — закон, описывающий гравитационное взаимодействие в рамках классической механики.
Он гласит,
что сила ![]() гравитационного
притяжения между двумя материальными
точками массы
гравитационного
притяжения между двумя материальными
точками массы ![]() и
и ![]() ,
разделёнными расстоянием
,
разделёнными расстоянием ![]() ,
пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния
между ними — то есть:
,
пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния
между ними — то есть:![]()
Гравитационная энергия — потенциальная энергия системы тел (частиц), обусловленная их взаимным гравитационным тяготением.
Первый
закон Кеплера-
Каждая планета Солнечной
системы обращается по эллипсу, в
одном из фокусов которого
находится Солнце. Форма эллипса
и степень его сходства с окружностью
характеризуется отношением ![]() ,
где
,
где ![]() —
расстояние от центра эллипса до его
фокуса (половина межфокусного
расстояния),
—
расстояние от центра эллипса до его
фокуса (половина межфокусного
расстояния), ![]() — большая
полуось. Величина
— большая
полуось. Величина ![]() называется эксцентриситетом эллипса.
При
называется эксцентриситетом эллипса.
При ![]() ,
и, следовательно,
,
и, следовательно, ![]() эллипс
превращается в окружность.
эллипс
превращается в окружность.
Второй закон Кеплера- Каждая планета движется в плоскости, проходящей через центр Солнца, причём за равные промежутки времени радиус-вектор, соединяющий Солнце и планету, описывает равные площади.
Третий закон Кеплера- Квадраты периодов обращения планет вокруг Солнца относятся, как кубы больших полуосей орбит планет. Справедливо не только для планет, но и для их спутников.
![]() ,
где
,
где ![]() и
и ![]() —
периоды обращения двух планет вокруг
Солнца, а
—
периоды обращения двух планет вокруг
Солнца, а ![]() и
и ![]() —
длины больших полуосей их орбит.
—
длины больших полуосей их орбит.
Ньютон установил,
что гравитационное
притяжение планеты определенной
массы зависит только от расстояния до
неё, а не от других свойств, таких, как
состав или температура. Он показал
также, что третий закон Кеплера не совсем
точен — в действительности в него
входит и масса планеты: ![]() ,
где
,
где ![]() —
масса Солнца, а
—
масса Солнца, а ![]() и
и ![]() —
массы планет.
—
массы планет.
18. Полная механическая энергия спутника в поле земного тяготения равна
|
|
где M![]() –
масса Земли, r – расстояние до ее
центра, m и υ – соответственно,
масса и скорость спутника. Если
энергия E отрицательна, то движение
будет происходить по финитной траектории
– эллипсу
–
масса Земли, r – расстояние до ее
центра, m и υ – соответственно,
масса и скорость спутника. Если
энергия E отрицательна, то движение
будет происходить по финитной траектории
– эллипсу
Космическая скорость (первая v1, вторая v2, третья v3) — это минимальная скорость, при которой какое-либо тело в свободном движении с поверхности небесного тела сможет:
-
v1 (круговая скорость) — стать спутником небесного тела (то есть вращаться по круговой орбите вокруг НТ на нулевой или пренебрежимо малой высоте относительно поверхности);
-
v2 (параболическая скорость, скорость убегания) — преодолеть гравитационное притяжение небесного тела и уйти на бесконечность;
-
v3 — покинуть звёздную систему, преодолев притяжение звезды;
1.
![]() ,
,
 ,
,
где m —
масса объекта, M —
масса планеты, G — гравитационная
постоянная, ![]() —
первая космическая скорость, R —
радиус планеты. Подставляя численные
значения (для Земли M = 5,97·1024 кг, R = 6 371 км),
найдем
—
первая космическая скорость, R —
радиус планеты. Подставляя численные
значения (для Земли M = 5,97·1024 кг, R = 6 371 км),
найдем
![]() 7,9 км/с
7,9 км/с
Первую
космическую скорость можно определить
через ускорение
свободного падения.
Поскольку ![]() ,
то
,
то
![]() .
.
2. Решая это уравнение относительно v2, получим
Между первой и второй космическими скоростями существует простое соотношение:
![]()
Квадрат скорости убегания равен удвоенному ньютоновскому потенциалу в данной точке (например, на поверхности небесного тела):
![]()
3. Для расчёта третьей космической скорости можно воспользоваться следующей формулой[2]:
![]()
где v — орбитальная скорость планеты, v2 — вторая космическая скорость для планеты. Подставляя численные значения (для Земли v = 29,783 км/с, v2 = 11,182 км/с), найдем
![]() 16,650 км/с
16,650 км/с
19. Уравнение Мещерского — основное уравнение в механике тел переменной массы, полученное И. В. Мещерским в 1897 году[1] для материальной точки переменной массы (состава).
Уравнение обычно записывается в следующем виде:
![]()
где:
-
 —
масса материальной
точки,
изменяющаяся за счет обмена частицами
с окружающей средой, в произвольный
момент времени t;
—
масса материальной
точки,
изменяющаяся за счет обмена частицами
с окружающей средой, в произвольный
момент времени t; -
 —
скорость
движения материальной
точки переменной массы;
—
скорость
движения материальной
точки переменной массы; -
 —
результирующая
внешних сил, действующих на материальную
точку переменной массы со
стороны её внешнего окружения (в том
числе, если такое имеет место, и со
стороны среды, с которой она обменивается
частицами, например электромагнитные
силы — в случае массообмена с
магнитной средой, сопротивление среды
движению и т. п.);
—
результирующая
внешних сил, действующих на материальную
точку переменной массы со
стороны её внешнего окружения (в том
числе, если такое имеет место, и со
стороны среды, с которой она обменивается
частицами, например электромагнитные
силы — в случае массообмена с
магнитной средой, сопротивление среды
движению и т. п.); -
 —
относительная
скорость присоединяющихся частиц;
—
относительная
скорость присоединяющихся частиц; -
 —
относительная
скорость отделяющихся частиц;
—
относительная
скорость отделяющихся частиц; -
 и
и  —
скорость увеличения суммарной массы
присоединившихся частиц и скорость
увеличения суммарной массы отделившихся
частиц соответственно.
—
скорость увеличения суммарной массы
присоединившихся частиц и скорость
увеличения суммарной массы отделившихся
частиц соответственно. -
Формула Циолковского может быть получена как результат решения этого уравнения.
-
Величина:
-

-
называется «реактивной силой».
22. Вынужденные колебания - это колебания, совершающиеся под действием внешней периодической силы. Наиболее простой и содержательный пример вынужденных колебаний можно получить из рассмотрения гармонического осциллятора и вынуждающей силы, которая изменяется по закону: .
![]()
23.
Пусть
имеется какое-то тело и мы хотим узнать
его момент инерции относительно какой-то
оси. Это означает, что мы хотим найти
его инертность при вращении вокруг этой
оси. Если мы будем двигать тело за
стержень, подпирающий его центр масс
так, чтобы оно не поворачивалось при
вращении вокруг оси (в этом случае на
него не действуют никакие моменты сил
инерции, поэтому тело не будет
поворачиваться, когда мы начнем двигать
его), то для того, чтобы повернуть его,
понадобится точно такая же сила, как
если бы вся масса была сосредоточена в
центре масс и момент инерции был бы
просто равен I1 =
MR2ц.м.,
где Rц.м —
расстояние от центра масс до оси
вращения. ![]()
Теорема
Гюйгенса — Штейнера -момент
инерции ![]() тела
относительно произвольной неподвижной
оси равен сумме момента инерции этого
тела
тела
относительно произвольной неподвижной
оси равен сумме момента инерции этого
тела ![]() относительно
параллельной ей оси, проходящей через
центр масс тела, и произведения массы
тела
относительно
параллельной ей оси, проходящей через
центр масс тела, и произведения массы
тела ![]() на
квадрат расстояния
на
квадрат расстояния ![]() между
осями:
между
осями:
![]()
где
![]() —
известный момент инерции относительно
оси, проходящей через центр масс тела,
—
известный момент инерции относительно
оси, проходящей через центр масс тела,
![]() —
искомый момент инерции относительно
параллельной оси,
—
искомый момент инерции относительно
параллельной оси,
![]() —
масса тела,
—
масса тела,
![]() —
расстояние между указанными осями.
—
расстояние между указанными осями.
24. Кинетическая энергия тела, движущегося произвольным образом, равна сумме кинетических энергий всех n материальных точек па которые это тело можно разбить:
![]()
Если тело
вращается вокруг неподвижной оси с
угловой скоростью ![]() , то
линейная скорость i-ой точки равна
, то
линейная скорость i-ой точки равна ![]() ,
где
,
где ![]() ,
- расстояние от этой точки до оси вращения.
Следовательно.
,
- расстояние от этой точки до оси вращения.
Следовательно.
|
|
(5.11) |
где ![]() -
момент инерции тела относительно оси
вращения.
-
момент инерции тела относительно оси
вращения.
В общем
случае движение твердого тела можно
представить в виде суммы двух движений
- поступательного со скоростью, равной
скорости ![]() центра
инерции тела, и вращения с угловой
скоростью
центра
инерции тела, и вращения с угловой
скоростью ![]() вокруг
мгновенной оси, проходящей через центр
инерции. При этом выражение для
кинетической энергии тела преобразуется
к виду
вокруг
мгновенной оси, проходящей через центр
инерции. При этом выражение для
кинетической энергии тела преобразуется
к виду
|
|
(5.12) |
где ![]() -
момент инерции тела относительно
мгновенной оси вращения, проходящей
через центр инерции.
-
момент инерции тела относительно
мгновенной оси вращения, проходящей
через центр инерции.
25. Между поступательным и вращательным движениями существует аналогия, которая позволяет легко запоминать формулы, относящиеся к вращательному движению.
Основные характеристики поступательного движения: путь S, скорость v, ускорение а и время t. При вращении им соответствуют: угол поворота φ, угловая скорость со, угловое ускорение ε и время t.
Пусть нам нужно написать уравнение равномерного вращательного движения. Вспоминаем формулу S=vt, справедливую для равномерного поступательного движения, и по аналогии пишем уравнение равномерного вращательного движения: φ=ωt. Для равномерного ускоренного (или замедленного) вращения справедливы формулы: угол поворота φ= ω0t±at2/2 и угловая скорость ω=ω0±εt (по аналогии с S=v0t±at2/2 и v=v0±at). В этих формулах знак "плюс" относится к случаю равномерно ускоренного движения, знак "минус" - равномерно замедленного.
Эта аналогия справедлива не только в кинематике, но распространяется и на динамику. Роль массы т при вращении играет момент инерции I, а роль силы F - момент силы L. Основное уравнение динамики вращательного движения Iε=L записывается по аналогии с ma=F, кинетическая энергия вращения Iω2/2 по аналогии с mv2/2 и т. д.
27. В физике взаимодействия трение принято разделять на:
-
сухое, когда взаимодействующие твёрдые тела не разделены никакими дополнительными слоями/смазками (в том числе и твердыми смазочными материалами) — очень редко встречающийся на практике случай. Характерная отличительная черта сухого трения — наличие значительной силы трения покоя
-
жидкостное (вязкое), при взаимодействии тел, разделённых слоем твёрдого тела (порошком графита), жидкости или газа (смазки) различной толщины — как правило, встречается при трении качения, когда твёрдые тела погружены в жидкость, величина вязкого трения характеризуется вязкостью среды;
-
Трение качения — момент сил, возникающий при качении одного из двух контактирующих/взаимодействующих тел относительно другого.
28. Гармонические колебания — колебания, при которых физическая величина изменяется с течением времени по синусоидальному или косинусоидальному закону. Кинематическое уравнение гармонических колебаний имеет вид.
![]()
или
![]() ,
,
где х —
смещение (отклонение) колеблющейся
точки от положения равновесия в момент
времени t; А —
амплитуда колебаний, это величина,
определяющая максимальное отклонение
колеблющейся точки от положения
равновесия;ω —
циклическая частота, величина, показывающая
число полных колебаний, происходящих
в течение 2π секунд; ![]() —
полная фаза колебаний,
—
полная фаза колебаний, ![]() —
начальная фаза колебаний.
—
начальная фаза колебаний.
Дифференциальное уравнение, описывающее гармонические колебания, имеет вид
![]()
Любое
нетривиальное[1] решение
этого дифференциального уравнения —
есть гармоническое колебание с циклической
частотой ![]()
Гармони́ческий осцилля́тор — система, которая при смещении из положения равновесия испытывает действие возвращающей силы F, пропорциональной смещению x (согласно закону Гука):
![]()
где k — коэффициент жёсткости системы.
Если F — единственная сила, действующая на систему, то систему называют простым или консервативным гармоническим осциллятором.