

Технические САУ, Петухов И.В., Стешина Л.А
.pdfВеличины 1/Tс (скорость перестановки регулирующего органа) и 2δ (зона нечувствительности) являются параметрами настройки Рс-регуляторов.
Таким образом, один из параметров настройки Рс-регулятора зависит от технических данных исполнительного механизма.
Скорость перемещения регулирующего органа можно определить соотношением
Тс Tи.мβ ,
2πi
где Ти.м – время одного оборота выходного вала исполнительного механизма; β – заданный угол поворота выходного вала исполнительного механизма; i – коэффициент передачи от вала исполнительного механизма до регулирующего органа.
Отметим, что уравнения Рс-регулятора справедливы при условии, что время перемещения регулирующего органа соизмеримо с постоянными времени объекта регулирования. Если же время перемещения регулирующего органа много меньше собственных времен объекта, то Рс-регулятор работает в режиме позиционного регулирования.
Регулирующие устройства пропорционального действия.
П-регуляторы осуществляют регулирующее воздействие на объект, пропорциональное отклонению регулируемого параметра от заданного значения. Для обеспечения такой пропорциональности от датчика обратной связи по положению исполнительного механизма полается сигнал, образующий совместно с сигналом отклонения регулируемой величины от заданного значения суммарный сигнал, который поступает на вход регулирующего устройства.
Уравнение П-регулятора имеет вид
μ Kр x ,
где Kр – коэффициент пропорциональности (усиления), параметр настройки регулятора.
229
В зависимости от типа применяемого исполнительного механизма П-регуляторы могут быть регуляторами постоянной и переменной скорости.
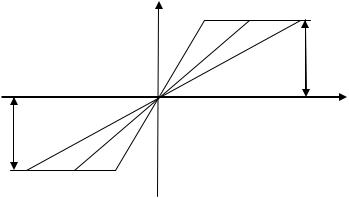
Статическая характеристика П-регулятора с учетом ограничения конечных положений регулирующего органа и при разных значениях Kp показана на рис. 14.4.
Кp 3 Кр 2
Кр 1 µмакс
-µмакс
Рис. 14.4. Статическая характеристика П-регулятора
Диапазон настройки коэффициента пропорциональности Kр (или величины, обратной Kр и выраженной в процентах, которую называют статизмом или коэффициентом неравномерности) в значительной мере зависит от конструкции исполнительного механизма.
Минимально допустимое для рассматриваемых электрических пропорциональных регуляторов значение коэффициента пропорциональности Kр определяется по максимальной величине сигнала обратной связи по положению регулирующего органа, при которой П-регулятор будет работать без автоколебаний. В свою очередь, величина сигнала обратной связи помимо зоны нечувствительности, эффективности стабилизирующей связи и т. п. зависит также от параметров датчика обратной связи исполни-
230
тельного механизма, его инерционности, передаточного числа и люфта редуктора.
Если датчиком обратной связи по положению регулирующего органа в исполнительном механизме является реохорд, то сигнал, соответствующий перемещению регулирующего органа на один виток обмотки реохорда, не должен превышать зону нечувствительности регулятора, т. е.
iK |
|
|
1 |
|
K |
|
|
1 |
|
|
p |
или |
p. мин |
, |
|||||||
|
|
|
|
|||||||
где ω – число витков обмотки реохорда; δ – зона нечувствительности регулятора.
Для П-регуляторов с исполнительным механизмом постоянной скорости большое значение для определения минимально допустимой величины Kр.мин имеет выбег исполнительного механизма при его отключении. Величина сигнала обратной связи, соответствующего углу поворота регулирующего органа при выбеге исполнительного механизма, должна быть меньше зоны нечувствительности регулятора.
Если соблюдается условие
2δKр. мин |
|
j макс |
|
|
M тр |
, |
|||
|
|
где j – приведённый момент инерции системы; μмакс – максимальная скорость перемещения регулирующего органа; Мтр – приведённый тормозной момент, действующий во время выбега двигателя, то при любом значении люфта в редукторе изменение положения регулирующего органа при выбеге исполнительного механизма не превосходит величины, соответствующей зоне нечувствительности регулятора.
Таким образом, можно сделать вывод, что для П-регуляторов с релейным усилителем минимальное значение коэффициента пропорциональности Kp ограничивается инерционностью и конструкцией тормозных устройств исполнительного механизма.
231
Для П-регуляторов с переменной скоростью исполнительного механизма при наличии стабилизирующей обратной связи по скорости электропривода, обеспечивающей уменьшение скорости при подходе к положению равновесия, допустимы значительно меньшие значения коэффициента пропорциональности Кр.
Регулирующие устройства интегрального действия.
И-регуляторы, называемые также астатическими, характеризуются тем, что скорость перемещения регулирующего органа у них пропорциональна отклонению регулируемой величины от ее заданного значения, а перемещение регулирующего органа пропорционально интегралу отклонения.
Закон регулирования, формируемый И-регуляторами, имеет
вид
μ |
1 |
xdt при |
|
x |
|
x0 |
; |
||
|
|
||||||||
|
|||||||||
Ти |
|
|
|
|
|
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
μ μмаксt при |
|
x |
|
x0 |
|
||||
где Ти – постоянная времени интегрирования, параметр настройки регулятора; μмакс – максимальная скорость перемещения регулирующего органа.
При использовании в И-регуляторах исполнительных механизмов постоянной скорости требуемая для этих регуляторов пропорциональная зависимость скорости перемещения регулирующего органа от величины управляющего сигнала обеспечивается импульсным режимом работы регулирующего устройства, так как известно, что среднее значение скорости исполнительного двигателя, работающего в импульсном режиме, пропорционально сигналу, поступающему на вход регулирующего устройства.
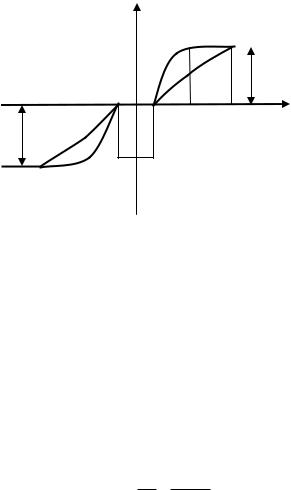
Статическая характеристика И-регулятора показана на рис. 14.5.
На рисунке Х1 – сигнал рассогласования, при котором скорость перемещения регулирующего органа достигает максимального значения μмакс.
232
µ=dµ /dt
1 |
|
|
|
2 |
|
µмакс |
|
0 |
|
|
|
X1 |
X2 |
||
2 |
|
|
|
-µмакс |
|
|
|
δδ
Рис. 14.5. Статическая характеристика И-регулятора (кривая 1)
Для исполнительных механизмов переменной скорости за счет введения в усилитель регулирующего устройства сигнала стабилизирующей обратной связи по скорости электродвигателя исполнительного механизма диапазон пропорциональной зависимости между скоростью двигателя и величиной отклонения может быть значительно увеличен (кривая 2).
Максимальная скорость перемещения регулирующего органа И-регуляторов, как и Рс-регуляторов, зависит от конструкции исполнительного механизма, способа соединения его выходного устройства с регулирующим органом и может быть определена по формуле
μмакс 1 2πi .
Tc Tи.мβ
Величина сигнала рассогласования х0, при которой скорость перемещения регулирующего органа становится максимальной, зависит от постоянной интегрирования Tи. Приближенно эта зависимость выражается формулой
x0 μмаксТи δ .
233
Одним из недостатков реальных И-регуляторов является сравнительно малый диапазон линейной зависимости скорости исполнительного механизма от величины входного сигнала. При х>x0 скорость перемещения регулирующего органа ограничивается возможностями исполнительного механизма и И-регулятор начинает работать как регулятор постоянной скорости.
Пропорционально-интегральные регуляторы. Уравнения регуляторов, обеспечивающих пропорционально-интегральный закон регулирования (ПИ-регуляторов) и пропорциональноинтегральный закон с воздействием по производной (ПИДрегуляторов), имеют вид соответственно:
|
1 |
|
|
|
|
|
; |
μ Kр x |
Tи |
xdt |
|
|
|
|
|
1 |
xdt Tд |
dx |
|
|
|
|
|
|
μ Kp x |
Tи |
|
. |
|
|
|
dt |
||
где Tд – величина, характеризующая степень введения производной в закон регулирования (время предварения).
Динамические свойства этих регуляторов, помимо параметров собственно регулирующих устройств (усилителей), во многом зависят также от схемы включения и технических данных используемых электрических исполнительных механизмов.
По способу включения исполнительных механизмов ПИ- и ПИД-регуляторы можно разделить на регуляторы:
а) с исполнительными устройствами без обратной связи по положению регулирующего органа;
б) с исполнительными устройствами, охваченными обратной связью.
Зависимость свойств регуляторов от характеристик исполнительных механизмов в общем виде принято выражать величиной Tсм называемой коэффициентом исполнительного устройства. Величина Тсм определяется такими факторами, как время одного оборота выходного вала исполнительного механизма, пере-
234

даточное отношение между его выходным валом и регулирующим органом, напряжение обратной связи по положению и т. п.
Для ПИ- и ПИД-регуляторов без обратной связи по положению регулирующего органа от величины коэффициента исполнительного устройства Тсм зависит коэффициент пропорциональности (усиления) регулятора Kр. Для регуляторов серии ЭР, разработанных Всесоюзным теплотехническим институтом (ВТИ), коэффициент пропорциональности Kр определяется так:
Kp 2πK1Tи , K2Tи.м
где K1 – коэффициент напряжения внутренней обратной связи усилителя; Ти – постоянная времени интегрирования; K2 – коэффициент передачи от исполнительного механизма к регулирующему органу; Ти.м – время одного оборота выходного вала исполнительного механизма. При этом K1 и Tи – параметры регулирующего устройства, а K2 и Ти.м – параметры исполнительного устройства.
Для ПИ- и ПИД-регуляторов с обратной связью по положению регулирующего органа связь между средним значением скорости исполнительного механизма, работающего в импульсном режиме, и сигналами, поступающими на вход регулирующего устройства, выражается через коэффициент исполнительного устройства следующим образом:
μ 1 (K1 x U о.c ),
ср Т см
где K1– коэффициент передачи измерительной схемы; Uо.с – напряжение обратной связи, подаваемое на вход усилителя. В связи с тем что коэффициент исполнительного устройства Тсм влияет на величину параметров регуляторов и форму переходного процесса в некоторых типах регуляторов (например, РУ4-16), кроме параметров настройки Кр, Ти и Тд имеется еще самостоятельный параметр настройки Тсм, настройка которого осуществля-
235
ется за счет изменения величины напряжения обратной связи по положению.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Перечислите типы ИУ дроссельного типа.
2.Каково назначение САР?
3.Опишите структурную схему САР.
4.Сформулируйте закон регулирования.
5.Приведите классификацию автоматических регуляторов.
6.Какова функциональная зависимость релейного позиционного Pп-регулятора?
7.Какова статическая характеристика П-регулятора?
8.Опишите статическую характеристику И-регулятора.
9.Дайте характеристику ПИ-регуляторов.
236
15. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ АВТОМАТИЗАЦИИ. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
15.1. Понятие функциональной схемы автоматизации
Функциональная схема автоматизации является основным техническим документом, определяющим функциональную структуру и объем автоматизации технологических установок, отдельных машин, механизмов и агрегатов, выполняющих технологический процесс.
Функциональная схема автоматизации представляет собой чертеж, на котором схематически, условными обозначениями изображены технологическое оборудование, коммуникации, органы управления и средства автоматизации (приборы, регуляторы, вычислительные устройства, элементы телемеханики) с указанием связей между технологическим оборудованием и элементами автоматики, а также связей между отдельными элементами автоматизации. Вспомогательные устройства, такие как редукторы и фильтры для воздуха, источники питания, автоматические выключатели и предохранители в цепях питания, соединительные коробки и другие устройства и монтажные элементы, на функциональных схемах автоматизации не показываются.
Функциональную схему автоматизации технологической установки выполняют, как правило, на одном чертеже, на котором изображают аппаратуру всех систем, контроля, регулирования, управления и сигнализации, относящуюся к данной технологической установке. Для сложных технологических процессов с большим объемом автоматизации схемы могут быть выполнены раздельно по видам технологического контроля и управления, т. е. отдельно выполняют схемы автоматического управления, контроля и сигнализации.
Для объектов с несложными технологическими процессами и простыми системами контроля управления функциональные
237
схемы автоматизации могут не составляться. Их заменяют перечнями систем контроля, регулирования, управления и сигнализации.
Прочитать функциональную схему автоматизации означает определить из нее:
1)параметры технологического процесса, которые подлежат автоматическому контролю и регулированию;
2)наличие защиты и аварийной сигнализации;
3)принятую блокировку механизмов;
4)организацию пунктов контроля и управления;
5)функциональную структуру каждого узла контроля, сигнализации, автоматического регулирования и управления;
6)технические средства, с помощью которых решается тот или иной функциональный узел контроля, сигнализации, автоматического регулирования и управления.
Чтобы прочитать функциональную схему автоматизации, необходимо знать принципы построения систем технологического контроля и управления и условные изображения технологического оборудования, трубопроводов, приборов и средств автоматизации, функциональных связей между отдельными приборами
исредствами автоматизации, а также иметь представление о характере технологического процесса и взаимодействии отдельных установок и агрегатов технологического оборудования.
Технологическое оборудование и коммуникации на функциональных схемах автоматизации изображают, как правило, упрощенно и в сокращенном виде, без указания отдельных технологических аппаратов и трубопроводов вспомогательного назначения. Изображенная таким образом технологическая схема дает ясное представление о принципе ее работы и взаимодействии со средствами автоматизации.
На функциональных схемах технологических трубопроводов обычно показывают ту регулирующую и запорную арматуру, которая непосредственно участвует в контроле и управлении про-
238