

Технические САУ, Петухов И.В., Стешина Л.А
.pdf
|
|
|
|
|
|
Регулирующие органы |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дросселирующие |
|
|
|
Дозирующие |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для стандартных |
|
Для стандартных |
|
Механические |
|
|
Электрические |
|
|||||||
|
ИУ |
|
|
ИУ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Заслоночные |
|
Задвижные |
Плужковые |
|
Реостатные |
|||||||||
|
Односедельные |
|
Крановые клапаны |
сбрасыватели |
|
Автотрансфор- |
|||||||||
|
|
Дозаторы |
|
||||||||||||
|
Трехходовые |
|
с поворотными |
|
маторы |
||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
створками |
Насосы |
|
|
|
|
||||||||
|
Двухседельные |
|
|
Специальные |
|||||||||||
|
|
Шиберные |
Питатели |
|
|||||||||||
|
Диафрагмовые |
|
|
|
|
|
|||||||||
|
|
Направляющие |
Компрессоры |
|
|
|
|
||||||||
|
Шланговые |
|
|
|
|
|
|||||||||
|
|
аппараты |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Специальные |
|
|
|
|
|
|
|
|
||
Рис. 13.3. Классификация регулирующих органов
К вспомогательным блокам относятся:
•блок ручного управления для механического (ручного) управления регулирующим органом;
•блок сигнализации конечных положений для выдачи информации о положении выходного элемента исполнительного механизма или затвора регулирующего органа;
•фиксаторы положения для фиксации положения выходного элемента исполнительного механизма или затвора регулирующего органа;
•блок дистанционного управления;
•датчик угловых перемещений вала ИМ;
•блок обратной связи для улучшения статических и динамических характеристик ИУ или всей замкнутой системы регулирования.
Большинство управляющих воздействий в нефтепереработке, нефтедобыче и нефтехимии реализуется путем изменения расходов веществ (например, сырья, топлива, кубового остатка колонны и т.д.).
209
Уравнение статики ИУ для расхода F жидкости или газа может быть описано следующим образом:
F = F( P, ν, ρ, C1, C2, …),
где P – перепад давления на РО; ν – вязкость; ρ – плотность; Сi – некоторые параметры, зависящие от конструкции РО, режима истечения потока и т.д. Следовательно, расход F может быть изменен путем:
•изменения P (насосные ИУ);
•изменения вязкости ν или плотности ρ (реологические ИУ);
•варьирования коэффициентов Ci (дроссельные ИУ).
13.3.Исполнительные устройства насосного типа
Структура ИУ насосного типа представлена на рис. 13.4, где u – управляющее воздействие со стороны регулятора, ИМ – исполнительный механизм (привод), РО – регулирующий орган (насос), Хр – параметр, изменяющий производительность насоса (частота вращения вала, ход поршня и т. д.).
|
|
|
|
Для данных ИУ, как правило, |
u |
ИМ |
|
давление на выходе Рвых больше, |
|
|
|
|
||
|
|
|
|
чем давление на входе Рвх, а пере- |
|
|
Хр |
|
пад давления на РО определяется |
Рвх |
|
|
Рвых |
как Р = Рвых–Рвх. |
|
РО |
|||
|
|
|
Насосные ИУ делятся на три |
|
|
|
|
|
|
|
|
|
|
|
Рис. 13.4. Структура ИУ
класса:
насосного типа 1) с вращательным движением регулирующего органа:
а) шестеренчатые. Зубья шестеренок создают со стенками корпуса множество объемов, посредством которых жидкость из всасывающей линии подается в нагнетательную. Обратный ток жидкости существенно меньше, так как при зацеплении шестеренок между собой остаточные объемы невелики (рис. 13.5);
210
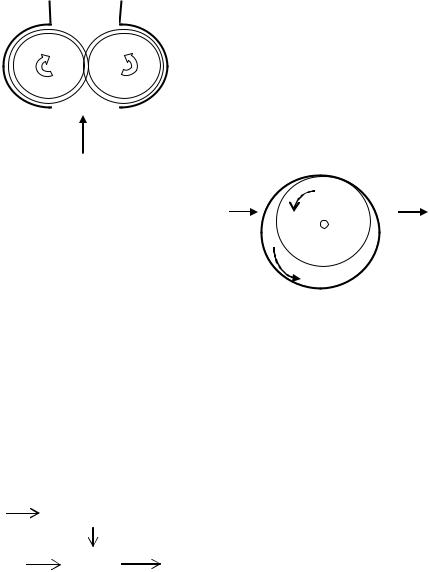
б) шиберные. При вращении шиберы центробежными силами прижимаются к корпусу и образуют с ним переменные объемы: на всасывающейся линии – увеличивающиеся, на нагнетательной – уменьшающиеся
|
|
|
|
|
(рис. 13.6); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
в) винтовые. Перекачка произво- |
|||||||||||||||||||||||||
|
|
F |
||||||||||||||||||||||||||||
|
|
дится винтовым шнеком; |
||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
Рис. 13.5. Схема работы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
шестеренчатого насоса |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) центробежные. Изме- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
нение расхода происходит за |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
счет изменения входной скоро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
сти в полости ротора насоса; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
2) с поступательным дви- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
жением РО: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
а) поршневые, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
б) мембранные, |
|
|
|
|
Рис. 13.6. Схема работы |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
шиберного насоса |
||||||||||||||||||||||
|
в) сильфонные. |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
13.4. Исполнительные устройства реологического типа
Реология – наука о поведении полимеров, вязкость которых, в отличие от ньютоновских жидкостей, сильно зависит от скорости деформации.
u |
Преобразователь |
|
|
|
|
|
ν |
Рвх |
|
Рвых |
|
РО |
|||
|
|
||
|
|
|
Рис. 13.7. Структура ИУ реологического типа
Некоторые жидкости и дисперсионные системы могут изменять вязкость под действием электрического поля (например, вазелиновое, трансформаторное, касторовое масла, олефины, алюмосиликаты и др.), т. е.
F = F(ν).
211
Преобразователь в ИУ данного типа осуществляет изменение электромагнитного поля в РО в зависимости от u, которое в свою очередь влияет на ν. При этом расход F на РО изменяется пропорционально (рис. 13.7).
13.5. Электрические исполнительные механизмы
В соответствии с ГОСТ 14691-69 «Устройства исполнительные для систем автоматического регулирования», электрические исполнительные механизмы (далее ЭИМ) определяются как исполнительные механизмы, использующие электрическую энергию.
ЭИМ предназначены для перемещения регулирующих органов исполнительных устройств в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами автоматических регулирующих и управляющих устройств.
ЭИМ перемещают рабочие органы запорно-регулирующей трубопроводной арматуры, обеспечивают функционирование регулирующих устройств: задвижек, заслонок, затворов, клапанов, шиберов, шаровых кранов, отсекателей и т. д. в системах автоматического регулирования технологических процессов в различных отраслях промышленности. Они применяются также в процессах дистанционного открытия-закрытия ворот, дверей, люков, вентиляционных каналов и т. д.
Принцип работы ЭИМ заключается в преобразовании электрического сигнала, поступающего от регулирующего или управляющего устройства в перемещение выходного элемента, передающего перестановочное усилие или момент регулирующему органу.
Механизмы устанавливаются вблизи или на регулирующих органах и связываются с ними посредством тяг, рычагов, шпинделей, штоков или других силовых конструкционных элементов.
212
Для работы в системах автоматического регулирования ЭИМ, называемые также электроприводами, часто содержат дополнительные блоки или датчики обратной связи (датчики положения, дающие информацию о положении выходного элемента исполнительного механизма, и блоки концевых выключателей), промежуточные выключатели для сигнализации в определенном положении исполнительных устройств, запуска или остановки дополнительного оборудования и т. п.
Вобщем случае электрический исполнительный механизм состоит из электропривода, редуктора, узла обратной связи, датчика указателя положения выходного элемента и конечных выключателей.
Вкачестве электропривода в исполнительных механизмах используются либо электромагниты, либо электродвигатели с понижающим редуктором для снижения скорости перемещения выходного элемента до величины, обеспечивающей возможность непосредственного соединения этого элемента (вала или штока) с рабочим органом.
Узлы обратной связи предназначены для введения в контур регулирования воздействия, пропорционального величине перемещения выходного элемента исполнительного механизма, а следовательно, и сочлененного с ним рабочего органа. С помощью конечных выключателей производится отключение электропривода исполнительного механизма при достижении рабочим органом своих конечных положений во избежание возможных повреждений механических звеньев, а также для ограничения перемещения рабочего органа.
Как правило, мощность сигнала, вырабатываемого регулирующим устройством, бывает недостаточной для непосредственного перемещения рабочего органа, поэтому исполнительный механизм можно рассматривать как усилитель мощности, в котором слабый входной сигнал, усиливаясь во много раз, передается на рабочий орган.
213
Все электрические исполнительные механизмы, нашедшие широкое применение в самых различных отраслях современной техники автоматизации производственных процессов, можно разделить на две основные группы: электромагнитные и электродвигательные (рис. 13.8).
Электрические
исполнительные механизмы
|
|
|
|
|
|
Электромагнитные |
|
|
|
|
|
|
|
|
Электродвигательные |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Соленоидные |
|
|
С электромагнит- |
|
|
С контактным |
|
|
|
|
|
Бесконтактные |
|
|
|||||||||||||||||||||||||||||
|
|
|
ными муфтами |
|
|
|
управлением |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Постоянной |
|
Переменной |
|
|
|
Постоянной |
|
|
|
|
|
Переменной |
|
|
|||||||||||||||||||||||||||||
|
|
скорости |
|
|
скорости |
|
|
|
|
|
скорости |
|
|
|
|
|
|
скорости |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С реверсивным |
|
|
|
С нереверсив- |
|
|
|
|
|
|
|
С реверсивным |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
двигателем |
|
|
ным двигателем |
|
|
|
|
|
|
|
|
|
двигателем |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вращательного |
|
Поступательного |
|
|
|
|
Вращательного |
|
|
|
|
|
Поступательного |
|
|||||||||||||||||||||||||||||
|
|
движения |
|
движения |
|
|
|
|
|
|
|
|
движения |
|
|
|
|
|
|
|
движения |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вращательного |
|
|
Поступательного |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
движения |
|
|
|
|
|
|
движения |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
Однооборотные |
|
|
|
|
|
|
Однооборотные |
|
|
|
|
|
|
|
|
Однооборотные |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
Многооборотные |
|
|
|
|
|
|
Многооборотные |
|
|
|
|
|
|
|
|
Многооборотные |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
Постоянно |
|
|
|
|
|
|
|
|
Постоянно |
|
|
|
|
|
|
|
|
Постоянно |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
вращающиеся |
|
|
|
|
|
|
|
вращающиеся |
|
|
|
|
|
|
|
|
вращающиеся |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.13.8. Классификация электрических исполнительных механизмов
К группе электромагнитных исполнительных механизмов относятся прежде всего соленоидные электроприводы, предназна-
214
ченные для управления различного рода регулирующими и запорными клапанами, вентилями, золотниками и т. п. Сюда же можно отнести исполнительные механизмы с различными видами электромагнитных муфт. Характерная особенность электрических исполнительных механизмов этой группы состоит в том, что необходимое для перестановки рабочего органа усилие создается за счет электромагнита, являющегося неотъемлемой частью исполнительного механизма.
Для целей регулирования соленоидные механизмы обычно применяются только в системах двухпозиционного регулирования. В системах автоматического управления в качестве исполнительных элементов часто используются электромагнитные муфты, которые подразделяются на муфты трения и муфты скольжения.
Ко второй, наиболее распространенной в настоящее время группе относятся электрические исполнительные механизмы с электродвигателями различных типов и конструкций.
Электродвигательные исполнительные механизмы обычно состоят из двигателя, редуктора и тормоза (последнего иногда может и не быть).
В зависимости от типа электроприводы могут состоять из следующих основных узлов (рис. 13.9):
•электродвигатель (1);
•силовой редуктор (2) с главной понижающей передачей, например, в виде червячной пары (3);
•блок сигнализации положения выходного вала (4) в состав которого входят реостатный датчик положения (5), концевые выключатели (6), нажатие на которые осуществляют кулачки концевых выключателей (7), кинематически связанные с выходным валом механизма;
•узел преобразования вращения выходного вала (8), который может быть представлен шариковинтовой парой для прямо-
215
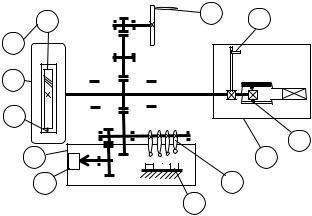
ходных механизмов (9), рычагом или коромыслом для поворотных механизмов (10);
• ручной привод со своей передачей и механизмами блокирования/деблокирования ручного привода (11).
М |
11 |
10 |
|
1
2
3
|
|
9 |
4 |
R |
8 |
|
|
|
5 |
|
7 |
|
|
6 |
Рис. 13.9. Упрощенная кинематическая схема ЭИМ
ЭИМ работает следующим образом. При подаче напряжения питания на электродвигатель 1 исполнительного механизма ротор последнего начинает вращаться. Через силовой редуктор 2 с главной понижающей передачей, например червячной 3, вращение от электродвигателя передается на выходной вал механизма, при этом благодаря большому передаточному отношению частота вращения выходного вала механизма понижается, а момент на выходном валу механизма возрастает. Закрепленные на выходном валу рычаг 10 или механизм преобразования вращательного движения в поступательное 9 приходят в движение и при соединении их со штоком, например, клапана перемещают последний. При снятии напряжения с электродвигателя ротор электродвигателя с некоторым выбегом останавливается и движение выходного вала механизма прекращается. При реверсе электродвигателя кинематически связанный с ротором электродвигателя выходной вал ме-
216
ханизма приходит во вращение в обратном направлении, а при остановке электродвигателя также останавливается и выходной вал механизма.
Сигнал управления поступает одновременно к двигателю и тормозу, механизм растормаживается и двигатель приводит в движение выходной орган. При исчезновении сигнала двигатель выключается, а тормоз останавливает механизм. Простота схемы, малое число элементов, участвующих в формировании регулирующего воздействия, и высокие эксплуатационные свойства сделали исполнительные механизмы с управляемыми двигателями основой для создания исполнительных устройств современных промышленных систем автоматического регулирования.
Существуют, хотя и не получили широкого распространения,
исполнительные механизмы с неуправляемыми двигателями, ко-
торые содержат управляемую электрическим сигналом механическую, электрическую либо гидравлическую муфту. Характерной их особенностью является то, что двигатель в них работает непрерывно все время работы системы регулирования, а сигнал управления от регулирующего прибора передается рабочему органу через управляемую муфту.
Исполнительные механизмы с управляемыми двигателями в
свою очередь можно разделить по способу построения системы управления на механизмы с контактным и бесконтактным управлением.
Включение, отключение и реверсирование электродвигателей исполнительных механизмов с контактным управлением производится с помощью различной релейной или контактной аппаратуры. Это определяет основную отличительную особенность исполнительных механизмов с контактным управлением: у таких механизмов скорость выходного органа не зависит от величины управляющего сигнала, подаваемого на вход исполнительного устройства, а направление перемещения определяется знаком (или фазой) этого сигнала. Поэтому исполнительные механизмы с
217
контактным управлением относят обычно к исполнительным устройствам с постоянной скоростью перемещения рабочего органа.
Для получения средней переменной скорости перемещения выходного органа исполнительного механизма при контактном управлении широко используется импульсный режим работы его электродвигателя.
В большинстве исполнительных механизмов, предназначенных для работы в схемах с контактным управлением, используются реверсивные электродвигатели. Применение электродвигателей, вращающихся только в одну сторону, весьма ограничено, но все же имеет место.
Бесконтактные электрические исполнительные механизмы отличаются повышенной надежностью и позволяют относительно просто получать как постоянную, так и переменную скорость перемещения выходного органа. Для бесконтактного управления исполнительными механизмами используются электронные, магнитные или полупроводниковые усилители, а также их сочетание. При работе управляющих усилителей в релейном режиме скорость перемещения выходного органа исполнительных механизмов постоянна.
Как электрические исполнительные механизмы с контактным управлением, так и бесконтактные подразделяют по нескольким признакам.
По характеру движения выходного элемента различают электроприводы:
поворотные (выходной элемент вращается по дуге до 360о) для управления шаровыми кранами и поворотными дисковыми затворами;
многооборотные (выходной элемент вращается более 360о) для управления шиберными и клиновыми задвижками;
прямоходные (выходной элемент перемещается поступательно) для управления клапанами любых типов.
218