

Образец выполнения
Условия задачи. Даны уравнения движения точки:
x=2cos(t⁄4) + 3,y= 2sin(t⁄8)1 (х,y– вcм ,t– в с ). (1)
Определить уравнение траектории точки; а также скорость, полное, касательное, нормальное ускорения точки и радиус кривизны ее траектории для момента времени t1= 1c.
Решение.Для получения уравнения траектории
точки исключим из уравнений движения
(1) времяt. Сначала
преобразуем уравнения (1) к виду![]() ,
,![]() .
.
Поскольку
tвходит в аргументы
тригонометрических функций причем один
аргумент вдвое больше другого, то,
воспользовавшись формулой![]() ,
получим :
,
получим :![]() .
.
Откуда после несложных преобразований находим уравнение траектории в виде
![]() (2)
(2)
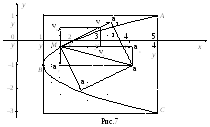
Очевидно,
что это уравнение параболы с вершиной
В(1, –1). Как следует из уравнений
движения (1) точки, ее координаты изменяются
в пределах:![]() ;
;![]() .
Поэтому траекторией является лишь
участокАВСпараболы (рис. 4).
.
Поэтому траекторией является лишь
участокАВСпараболы (рис. 4).
Найдем
положение точки в момент времени
![]() с
. Для этого вычисляем значения координат:
с
. Для этого вычисляем значения координат:
![]() 1,59
см ,
1,59
см ,
![]() –
0,24 см
–
0,24 см
На рис.4 этому положению соответствует точка М.
Находим выражения для проекций вектора vскорости точки на координатные оси, используя известные формулы кинематики [1,c.102]:
![]() ,
,
![]()
(здесь и далее точки над переменными означают дифференцирование по времени) .
Находим модуль вектора скорости:
![]() .
.
Вычисляем
значения при
![]() с
:
с
:
![]() 1,11
см/c,
1,11
см/c,
![]() 0,73
см/c,
0,73
см/c,
![]() 1,33
см/с .
1,33
см/с .
Аналогично находим проекции вектора аускорения точки на координатные оси и модуль ускорения [1c.103]:
![]() ,
,
![]() ,
,
![]() .
.
Значения,
соответствующие
![]() с
будут:
с
будут:
![]() 0,87
см/c2,
0,87
см/c2,
![]() –
0,12 см/c2,
–
0,12 см/c2,
![]() 0,88
см/c2.
0,88
см/c2.
Величину
касательного ускорения точки найдем
как проекцию вектора ее ускорения
![]() на
направление вектора ее скоростиv
на
направление вектора ее скоростиv![]() ,
т.к. известно, что векторvнаправлен по касательной к траектории
:
,
т.к. известно, что векторvнаправлен по касательной к траектории
:
![]()
Здесь
![]() -
скалярное произведение вектороваиv.
-
скалярное произведение вектороваиv.
Для
момента времени
![]() с,
используя ранее найденные значения,
получим :
с,
используя ранее найденные значения,
получим :
![]() см/c2.
см/c2.
Поскольку
векторы касательного aи нормальногоanускорений взаимно перпендикулярны а
их сумма равна полному ускорению точки![]() ,
то можно найти величину нормального
ускорения, используя теорему Пифагора
(см. рис.7):
,
то можно найти величину нормального
ускорения, используя теорему Пифагора
(см. рис.7):![]() .
.
Для
момента времени
![]() получим
значение:
получим
значение:
![]() см/c2.
см/c2.
Радиус
кривизны траектории определяем, используя
известную формулу [1, c.109]
для нормального ускорения![]() (- радиус кривизны траектории точки).
(- радиус кривизны траектории точки).
Отсюда
получаем
![]() и вычисляем значение радиуса кривизны
в том месте траектории, где находится
точка в момент времени
и вычисляем значение радиуса кривизны
в том месте траектории, где находится
точка в момент времени![]() с
:
с
:![]() см
.
см
.
Ответ:![]() -уравнение
траектории;М(1,59; -0,24) - положение
точки;v(1,11; 0,73),v= 1,33 см/с - скорость;a(0,87;
-0,12),a= 0,88 см/с² -
ускорение;
= 3,85 см – радиус кривизны.
-уравнение
траектории;М(1,59; -0,24) - положение
точки;v(1,11; 0,73),v= 1,33 см/с - скорость;a(0,87;
-0,12),a= 0,88 см/с² -
ускорение;
= 3,85 см – радиус кривизны.
Задача к2
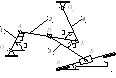
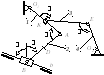
Плоский механизм состоит из жестких стержней 1–4и ползунаB, соединенных шарнирно; стержни1и4шарнирно связаны с неподвижными опорамиO1,O2(рис. К2.0 – К2.9). Положение механизма определяется углами,,,,, значения которых приведены в табл.5. Дуговые стрелки на рисунках указывают направление отсчета углов при построении чертежа. ТочкиDиKявляются серединами соответствующих звеньев. Длины стержней:l1= 0,4 м ,l2= 1,2 м ,l3= 1,4 м ,l4= 0,8 м.
В столбце "Скорости" табл.5 задана величина угловой скорости стержня 1или4, либо линейной скорости ползунаB. Вектор скоростиvBнаправлен от точкиBкb, а угловые скорости 1 , 4– против хода часовой стрелки.
Определить скорости двух точек механизма и угловую скорость стержня, указанные в столбце "Найти" таблицы 2
Таблица 2
|
Вариант |
Углы, град |
Скорости |
Найти | ||||||
|
|
|
|
|
|
1, с-1 |
4, с-1 |
vB, м/с | ||
|
0 |
30 |
150 |
120 |
0 |
60 |
2 |
– |
– |
vB, vE, 2 |
|
1 |
60 |
60 |
60 |
90 |
120 |
– |
3 |
– |
vA, vD, 3 |
|
2 |
0 |
120 |
120 |
0 |
60 |
– |
– |
10 |
vA, vE, 2 |
|
3 |
90 |
120 |
90 |
90 |
60 |
3 |
– |
– |
vB, vE, 2 |
|
4 |
0 |
150 |
30 |
0 |
60 |
– |
4 |
– |
vB, vA, 2 |
|
5 |
60 |
150 |
120 |
90 |
30 |
– |
– |
8 |
vA, vE, 3 |
|
6 |
30 |
120 |
30 |
0 |
60 |
5 |
– |
– |
vB, vE, 3 |
|
7 |
90 |
150 |
120 |
90 |
30 |
– |
5 |
– |
vA, vD, 3 |
|
8 |
0 |
60 |
30 |
0 |
120 |
– |
– |
6 |
vA, vE, 2 |
|
9 |
30 |
120 |
120 |
0 |
60 |
4 |
– |
– |
vB, vE, 3 |
|
Р |
Р | |
|
Р |
Р | |
|
Р |
Р | |
|
Р |
Р | |
|
Рис.
К2.8 |
Р | |
 ис.
К2.0
ис.
К2.0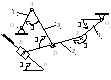 ис.
К2.1
ис.
К2.1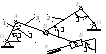 ис.
К2.2
ис.
К2.2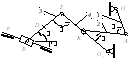 ис.
К2.3
ис.
К2.3 ис.
К2.4
ис.
К2.4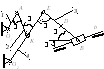 ис.
К2.5
ис.
К2.5 ис.
К2.6
ис.
К2.6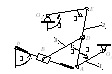 ис.
К2.7
ис.
К2.7
 ис.
К2.9
ис.
К2.9
Указания.К2 – задача на использование методов кинематического анализа плоских механизмов. Расчет кинематических характеристик начинается с того звена механизма, движение которого задано в условии задачи. Затем расчет ведётся «по цепочке» с переходом от одного звена механизма к другому, связанному с ним. Для нахождения скоростей точек механизма и угловых скоростей его звеньев следует использовать теорему о проекциях скоростей двух точек твердого тела, а также свойства мгновенного центра скоростей.
Построение чертежа удобнее начать с того cтержня, положение которого определяется углом. Направляющие ползунаBдля большей наглядности рекомендуется изображать так, как показано на рис.8б.