

-
Коэффициенты потери точности.
Оценка точности результатов уравнивания обычно выполняется с помощью ковариационной матрицы Кх или корреляционной матрицы Qx, которые связаны между собой через апостериорную дисперсию единицы веса σ2 соотношением:
Kx=σ2Qx. (8.23)
В ковариационной матрице диагональными элементами являются дисперсии неизвестных σi2, недиагональные элементы (ковариации) равны произведениям стандартных ошибок и коэффициентов корреляции r, характеризующих линейную зависимость между уравненными величинами. Ковариационная матрица для навигационного решения имеет вид:
 (24)
(24)
Корреляционная матрица имеет вид:
 (25)
(25)
где рi - веса уравниваемых величин.
Рассмотрим случай, когда измерения псевдодальностей принимаются некоррелированными и равноточными, то есть матрица весов измерений Р определяется как
P = σ2I (26)
где σо- априорная средняя квадратическая ошибка единицы веса; I - единичная матрица размера s x s (s - число спутников). Поэтому корреляционная матрица вычисляется через коэффициенты в матрице уравнений поправок A:
 (27)
(27)
Отсюда следует, что оценка точности неизвестных распадается на две части: определение средней квадратической ошибки (или дисперсии) единицы веса, которая зависит от точности измерения псевдодальностей, и нахождение обратной матрицы нормальных уравнений, которая зависит от взаимного расположения определяемого пункта и созвездия спутников, то есть от геометрии засечки.
Дисперсия единицы веса σ2 находится по результатам уравнивания, если число спутников в созвездии больше, чем четыре:
σ2 = vTv/(s - 4). (28)
Для оценки влияния геометрии расположения спутников на точность навигационного решения используются коэффициенты потери точности DOP (Dilution of Precision - понижение или потеря точности). Коэффициенты DOP являются функциями диагональных элементов ковариационной матрицы уравненных параметров. В общем случае,
σi=σ0DOP, (29)
где σi - средняя квадратическая (или стандартная) ошибка, например, для положения в плане или по высоте.
Если вектор определяемых параметров X и матрица коэффициентов А задаются уравнениями (15), то оценка точности неизвестных выполняется в соответствии с известными формулами:
![]() (30)
полная ошибка положения пункта находится
по формуле:
(30)
полная ошибка положения пункта находится
по формуле:
 (31)
(31)
а полная ошибка положения с учетом ошибок времени - по формуле:
![]() (32)
(32)
Обозначим:
![]() (33)
(33)
![]() (34)
(34)
![]() (35)
(35)
Здесь через tr(...) обозначен след матрицы. Коэффициенты потери точности DOP, называемые также геометрическими факторами, характеризуют:
• PDOP (Position DOP) - понижение точности в положении пункта;
• TDOP (Time DOP) - понижение точности определения времени;
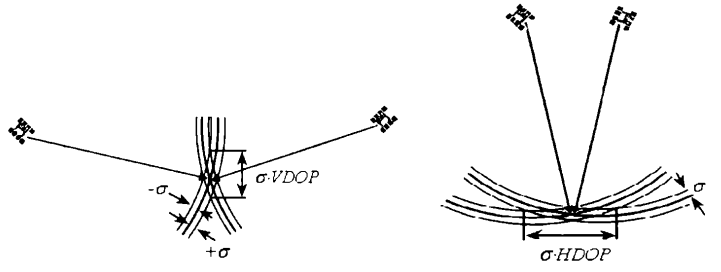
• GDOP (Geometrical DOP) - понижение точности положения и времени из-за геометрии. В данном контексте под геометрией понимается взаимное расположение созвездия спутников и пункта наблюдений (рис.2).
а) б)
Рис. 2. Влияние геометрии:
а) при расположении спутников вблизи горизонта увеличивается ошибка определения высоты σ VDOP;
б) при расположении спутников вблизи зенита увеличивается ошибка определения планового положения σ HDOP
Более удобно оценивать точность в топоцентрической координатной системе ENU, поскольку ошибка в координате N равна ошибке в широте, ошибка в координате Е равна ошибке в долготе, и ошибка в U равна ошибке в геодезической высоте Н. Корреляционную матрицу Qx можно преобразовать в корреляционную матрицу для этой координатной системы Qix с использованием соотношения:
 (36)
(36)
Теперь, используя матрицу Q'x , можно сделать априорную оценку точности определения положения в плане и по высоте:
![]() (37)
(37)
![]() (38)
(38)
где
• VDOP (Vertical DOP) характеризует понижение точности в геодезической высоте;
• HDOP (Horizontal DOP) - понижение точности в плановом положении пункта.
Коэффициент потери точности GDOP является наиболее общей характеристикой, отражающей геометрию положения и оценку времени. Математически он представляет собой корень квадратный из следа обратной нормальной матрицы tr(ATA)-1 = tr(N)-1.
Геометрическая
интерпретация величины PDOP
при наблюдении четырех спутников связана
с объемом тетраэдра, стороны которого
соединяют концы единичных векторов
топоцентрических направлений на спутники
(рис. 3). Чем больше объем тетраэдра, тем
меньше PDOP.
Тетраэдр самого большого объема возможен
в случае, когда один из спутников
находится в зените, а три остальных
спутника расположены с равными по
азимуту расстояниями ниже горизонта с
углом возвышения 19,47 градусов: GDOP
при этом будет составлять 1,581. Естественно,
GPS
приемник не способен принимать сигналы
от спутников, расположенных ниже
горизонта, поэтому наименьший GDOP
(1,732) достижим в случае, когда один из
спутников находится в зените, а три
остальных спутника расположены
вблизи горизонта через 120° по азимуту.
Некоторые ранние модели GPS
приемников могли отслеживать одновременно
только четыре спутника. Эти приемники
использовали такой алгоритм выбора
видимых спутников, при котором
отслеживались только те четыре, которые
обеспечивали наибольший объем тетраэдра,
и, следовательно, наименьшее значение
DOP. Рис. 3.Тетраэдр, вершины которого 1, 2, 3,
4 являются концами единичных векторов
направлений на спутники с пункта А.
Объем тетраэдра обратно пропорционален
величине PDOP
Рис. 3.Тетраэдр, вершины которого 1, 2, 3,
4 являются концами единичных векторов
направлений на спутники с пункта А.
Объем тетраэдра обратно пропорционален
величине PDOP
Средняя величина HDOP и VDOP - около двух. Как общее правило, значения PDOP больше 5 считаются слабыми, а при PDOP больше 7 ответственные измерения обычно не производятся. Коэффициенты DOP можно вычислять на будущее по приближенному положению приемника и предсказанным эфемеридам спутника. Отсюда ясно, почему матрицу коэффициентов А часто называют «матрицей плана»; действительно, можно вычислить корреляционную матрицу заранее, перед сеансом наблюдений, если знать, где будут спутники (которые берутся из альманаха навигационного сообщения). Поэтому можно так «планировать» измерения (в данном случае, выбирать время суток), чтобы точность положения не зависела от «слабой геометрии» спутников.