

-
Решение системы уравнений при абсолютном определении по псевдодальностям.
Запишем систему уравнений поправок для псевдодальностей как
-UiX,AdX A-UiY,AdYA-UiZ,AdZA +cdtA +liA = υiA,i=1,2, ...,s. (14)
Обозначим:
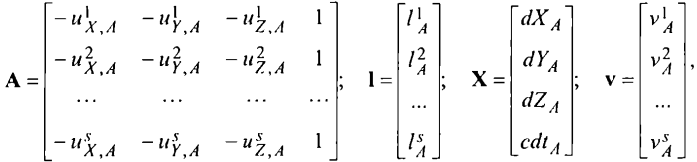 (15)
(15)
тогда систему (14) можно записать в матричном виде:
АХ + 1 = v. (15)
При s = 4 вектор поправок в псевдодальности v = О, а решение системы уравнений (16) производится по формуле:
Х = -А-1 I. (17)
Вектор координат пункта и поправка часов приемника определяются из выражений:
RA= R° +dRA, dtA=(cdtA)/c. (18)
Так реализуется режим трехмерных определений (3D), или навигационное решение. Для тех ситуаций, когда число спутников s = 3, используется дополнительная информация, например, предполагается известной высота приемника над эллипсоидом НА. Для корабля в океане геодезическую высоту приемника можно точно вывести из высоты приемника над водной поверхностью и высот геоида над эллипсоидом, которые вычисляются по гармоническим разложениям . Уравнение (5) можно выразить через эллипсоидальные координаты (широту, долготу и высоты над эллипсоидом), используя преобразования. В этих преобразованных уравнениях эллипсоидальные высоты рассматриваются как известные величины. Тогда остается три неизвестных: поправки в широту и долготу (плановые координаты) и поправка часов приемника. Таким образом, в принципе, для определений на море достаточно измерить псевдодальности до трех спутников (режим 2D позиционирования). Возможны другие варианты основного решения. Следует иметь в виду, что при получении геодезической высоты по нормальной высоте, взятой, к примеру, с карты, необходимо учитывать высоту квазигеоида над эллипсоидом.
При доступности всего полного спутникового созвездия нужно, естественно, наблюдать все спутники в зоне видимости и выполнять решение по методу наименьших квадратов. Тогда, при s > 4 достигается режим трехмерных переопределенных измерений (overdetermined 3D). Это требует введения весовой матрицы для измеренных псевдодальностей:
Р = σ02*К-1p, (19)
где Кp - ковариационная матрица ошибок псевдодальностей, а σ20 - априорная дисперсия единицы веса. Практически обычно корреляционные зависимости между измерениями не учитываются, а назначение весов выполняется либо в зависимости от синуса угла высоты спутника, либо в зависимости от отношения уровней сигнала и шума, либо в соответствии с пользовательской эквивалентной ошибкой дальности UERE.
Оценка вектора неизвестных при неравноточном уравнивании выполняется под условием vT Pv = min , а решение получается как
Х = -(АTРА)-1 (АTРl). (20)
Чаще всего решение производится с предположением о том, что измерения равноточные. В соответствии с условием vTv = min, по методу наименьших квадратов составляется система нормальных уравнений:
АTАХ + АT l= 0, (21)
откуда получается оценка вектора неизвестных
Х = -(АTА)-1(АT1). (22)
Решение системы (16) часто производится методом приближений или с использованием алгоритма Калмановской фильтрации, так как для линеаризации геометрических дальностей (5) необходимо иметь априорные координаты приемника, близкие к их истинным значениям в пределах нескольких десятков километров. Для этого, как правило, используют хранящиеся в памяти приемника результаты последнего решения. Фильтр Калмана предназначен для рекурсивного дооценивания вектора состояния априорно известной динамической системы, то есть для расчёта текущего состояния системы необходимо знать текущее измерение, а также предыдущее состояние самого фильтра. Таким образом фильтр Калмана, как и множество других рекурсивных фильтров, реализован во временном представлении, а не в частотном. В работе Шебшаевича (1993) сообщается, что при ошибке положения в 8 ООО км достаточно четырех итераций. Тем не менее, многие модели приемников после перемещения на большие расстояния требуют ввода приближенных координат. Один из алгоритмов решения без априорных координат пункта - метод Банкрофта.