

3 Расчет параметров обгона
3.1 Дистанция безопасности
Достоверность расчетов по определению параметров обгона зависит от правильного принятия основных допущений, связанных с назначением дистанции безопасности между ТС до и после обгона. Эта дистанция зависит от многих факторов: типа ТС, дорожных условий, мастерства водителя, скорости TС, интенсивности движения и т.д.; величина дистанции не подлежит точному расчету. Поэтому в экспертных исследованиях следует подчеркивать, что найденное значение является расчетным.
В литературе имеется много предложений для ориентировочного определения дистанции безопасности. Некоторые авторы предлагают выбирать дистанцию безопасности, исходя из времени, необходимого для оценки дорожно-транспортной ситуации, считая, что для этого потребуется 2...5 с. В этом случае D=(2…5)*V. По данным работы [1], дистанцию можно определять из графика, представленного на рис. 3 в зависимости от типов АТС, движущихся друг за другом.
В работе [8] приведена эмпирическая зависимость, по которой предлагается определять расстояние между автомобилями в момент начала выравнивания скоростей перед обгоном:
D = 6,5*e0,09*Vсв, (2)
где D – расстояние между автомобилями, м;
е = 2,718 – основание натуральных логарифмов;
VСВ – скорость свободного движения, м/с.
В работе [25] дистанцию безопасности предлагается определять в зависимости от типа обгоняемого автомобиля по формулам:
для легковых автомобилей:
DAB = 0,0256* VА2 + 4;
DBA = 0,0201* VА2 + 4; (31)
для средних грузовых:
DAB = 0,0407* VА2 + 4;
DBA = 0,0372* VА2 + 4; (311)
для тяжелых грузовых автомобилей и автопоездов:
DAB = 0,0587* VА2 + 4;
DBA = 0,0515* VА2 + 4, (3111)
где DAВ и DBA – расстояния между автомобилями, соответственно, до и после обгона, м;
VA – скорость обгоняющего автомобиля, м/с.
Рассмотрим, что происходит при движении ТС в потоке и найдем наименьшее расстояние на котором должны следовать ТС друг за другом, чтобы в случае экстренного торможения лидера, следующее за ним ТС могло остановиться.
Водитель ТС, следующего сзади, может заметить начало торможения переднего ТС, по изменению его скорости (при торможении двигателем, стояночной или вспомогательной тормозными системами) или по включенному стоп-сигналу.
Момент загорания стоп-сигнала зависит от места установки его включателя. Желательно, чтобы сигнал включился как можно раньше и предупредил водителя ТС, следующего сзади о торможении ТС-лидера. Этому способствует связь включателя с педалью тормоза; при малейшем нажатии на педаль тормоза стоп-сигнал загорается. Такие включатели получили наибольшее распространение на современных легковых автомобилях.
Другой тип включателей стоп-сигнала устроен так, что его контакты замыкаются под действием диафрагмы, которая прогибается от давления жидкости или воздуха, поступающего в тормозную магистраль. Включение стоп-сигнала происходит при нарастании давления в магистрали, при этом стоп-сигнал включается позже, чем в первом случае. С достаточной точностью можно считать, что время запаздывания включения стоп-сигнала после нажатия на педаль тормоза в этом случае равно времени Т2 запаздывания срабатывания тормозного привода.
Большинство авторов предлагает определять дистанцию безопасности между автомобилями, движущимися в потоке, по формуле, учитывающей время, необходимое для обнаружения сигнала торможения впереди идущего ТС, т.е. время реакции водителя обгоняющего ТС и разность тормозных путей ТС. В работе [5], например, предлагается считать
DAB = SAО – SBТП + S3, (4)
где DAB – дистанция между ТС А и В;
SAО – остановочный путь ТС А; это расстояние, которое проходит ТС А с момента обнаружения опасности до остановки (в нашем случае это расстояние, пройденное с момента загорания стоп-сигнала);
SВТП – путь, который проходит ТС В с момента загорания стоп-сигнала до остановки;
S3 – запас расстояния, в проекте его рекомендуется принять S3 = 3 м (в экспертных исследованиях запас расстояния принимают SЗ = 0). В реальных условиях движения запас расстояния позволяет избежать столкновения в случае ошибочного прогнозирования ситуации.
Остановочный путь SAО ТС А (индекс «А» показывает, что величина относится к ТС А) можно определить по формуле:
SAО = SА1 + SА2 + SА3 + SAТ, (5)
где SА1 – путь, проходимый ТС А за время ТА1 реакции водителя:
SА1= ТА1*VА; (6)
VA – скорость движения ТС А, м/с;
SА2 – путь, проходимый за время ТА2 запаздывания срабатывания тормозного привода:
SА2 = ТА2*VА; (7)
SА3 – путь, проходимый за время ТА3 нарастания замедления:
SА3 = 0,5*ТА3*VА; (8)
SAТ – путь, проходимый при установившемся замедлении jУСТ.
SАТ = VАЮ2/(2* jАУСТ); (9)
здесь VЮА – скорость ТС А в начале торможения с установившимся замедлением (при блокировании колес ее называют юзовой), м/с:
VАЮ=VА– 0,5*jАУСТ*TА3. (10)
iАУСТ – установившееся замедление ТС А в рассматриваемых условиях. Оно зависит от величины замедления jУСТ, которое может быть получено на горизонтальной дороге и величины уклона i:
jАУСТ = jУСТ i*g;
здесь g=9,81 м/с2 – ускорение свободного падения.
Остановочный путь можно определить и по такой формуле:
SAО = (ТА1 + ТА2 + 0,5*ТА3)*VA +VAЮ2/(2*jАУСТ). (11)
Время реакции водителя Т1А выбирается в пределах от 0,3 до 1,8 с по нормативным документам в зависимости от дорожно-транспортной ситуации [13]. Поскольку в курсовом проекте (работе) не рассматривается конкретная ситуация, условно примем, что ТА1=0,8 с.
Время ТА2 запаздывания тормозной системы, время ТА3 нарастания замедления и установившееся замедление jАУСТ (м/с2) зависят от категории ТС, степени его загрузки и условий сцепления (см. приложение 1);
Путь, который проходит ТС В с момента загорания стоп-сигнала определяется по формулам (12 и 13):
при загорании стоп-сигнала в момент нажатия на педаль (для гидравлического тормозного привода):
SВТП=SВ2+SB3+SBТ=(ТВ2+0,5*ТB3)*VB+VВЮ2/(2*jВУСТ); (12)
при загорании стоп-сигнала от нарастания давления в тормозной магистрали (для пневматического привода):
SВТП = SB3 + SBТ = 0,5*ТB3*VB + VВЮ2/(2*jВУСТ); (13)
здесь индексом «B» отмечены величины, относящиеся к ТС В.
При совмещении тормозных диаграмм на одном графике в едином масштабе времени, следует учесть способ включения стоп-сигнала.
На рис. 2 показаны зависимости изменения замедления, скорости и пути проходимого автомобилями А и В, в функции времени. При построении графика принято, что VА = VB , включатель стоп-сигнала у ТС-лидера связан с педалью тормоза, а jА УСТ > jВ УСТ. Кривые n и m показывают сравнительные зависимости изменения пути, проходимого автомобилями А и В при торможении, а штрихпунктирная кривая р – перемещение автомобиля В для случая, если в начальный момент торможения, он будет находиться на безопасном расстоянии DAB от автомобиля А.
Подобный график, рассчитанный для заданных ТС, следует привести в пояснительной записке на отдельной форматке или на одном листе вместе с другими графиками.
При построении кривых сначала наносят тормозные диаграммы jА,В = f (Т), отмечая на них слагаемые Т1, Т2, Т3, Тт (Тт = VЮ/jУСТ), затем определяют падение скорости Vн за время нарастания замедления
Vн = 0,5*jуст*Т3 , (14)
и наносят на график кривые изменения скорости VA и VB в функции времени. Далее кривую изменения скорости разбивают на ряд интервалов и в каждом из них
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3. Дистанция безопасности при движении ТС в потоке:
1-грузовой автомобиль следует за легковым;
1
3
4
2



 2-грузовой
движется за грузовым;
2-грузовой
движется за грузовым;
3-легковой следует за легковым;
 4-легковой
следует за грузовым.
4-легковой
следует за грузовым.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
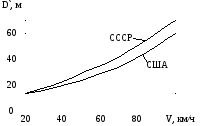
Рис. 4. Экспериментальные зависимости динамических габаритов
определяют тормозной путь по формуле
Si = (Vi2 – Vi+12)/ (2*jiср), (15)
где Si – тормозной путь в интервале, м;
Vi , Vi+1 – соответственно, начальная и конечная скорости в интервале, м/с;
jiср – среднее замедление в интервале, м/с2,
далее откладывают эти значения в правой части графика в конце каждого интервала нарастающим итогом. Изменение времени в каждом интервале будет равно:
ti = Vi / jiср. (16)
На этом же графике следует построить необходимые кривые для определения дистанции между ТС в момент начала обгона с ходу, когда скорость VA выше скорости VB.
При выполнении задания следует сопоставить результаты определения дистанций, найденных всеми предлагаемыми способами и обосновать значения дистанций, принятых для дальнейших расчетов.
Зависимости дистанций безопасности от скорости необходимо представить в виде двух отдельных графиков DAB=f(V) и DBA=f(V), которые следует изобразить на миллиметровой бумаге.
Результаты определения дистанций DAВ и DBA необходимо сравнить с экспериментальными характеристиками, полученным на дорогах СССР и США [2], которые приведены на рис. 4. Следует обратить внимание, что на этом рисунке по оси ординат отложена сумма длины автомобиля и дистанции безопасности перед ним, т.е. LB +DAB и LB+DBA .
При дипломном проектировании требуется более детально рассмотреть правомерность принятых допущений о назначении дистанции безопасности с учетом фаз перестроения ТС до и после выполнения обгона.