

3.2.6. Рабочее оборудование строительных машин
|
Рабочее оборудование строительных машин – в общем случае состоит из рабочего органа, механизмов его удержания и перемещения - манипулирования и устройств крепления к раме СМ. |
Механизмы манипулирования рабочим органом называют манипуляторами. Устройство рабочего оборудования определяется его технологическим назначением. Конструктивно оно выполняется в навесном и подвесном, передвижном (прицепном и полуприцепном), стационарном исполнениях (рис. 3.22).








Рис. 3.22. Основные виды исполнений рабочего оборудования
размещенных на базовых машинах:
а) навесной развитый (до6-ти степеней свободы) манипулятор с бурильной
машиной и подающим механизмом, размещенный на автомобильном С;
б) простейшие навесные манипуляторы подъема-заглубления рыхлителя и
бульдозерного отвала размещенные на гусеничном тракторе; в) навесной
развитый манипулятор с поворотным кругом и системой гидроцилиндров
пространственного изменения положения отвала; г) полуприцепное скреперное
рабочее оборудование и конструкция опорно-сцепного устройства; д) камерное
смесительное рабочее оборудование (безманипуляционное) на автомобильном СШ
Многообразие процессов обуславливает использование различных видов рабочих органов как обычно (пассивного) исполнения, так и интенсифицированных (активных). Последние требуют отдельной цепи подвода энергоносителя или имеют собственный привод.
В обычных рабочих органах имеются различные конструктивные части, позволяющие реализовать отдельные операции рабочих процессов. Например, ковшевые рабочие органы для копания грунтов имеют зубья - или ножи - для отделения грунта от массива и емкость - для его аккумулирования. Активные части рабочих органов выполняются с применением высококачественных конструкционных материалов по современным технологиям.
Кроме рабочих органов обычного исполнения имеются рабочие органы активного действия (интенсифицирующие). Наиболее часто они используются в СМ разработки (разрушения) грунтов пород (рис. 3.23). В большинстве случаев - это отдельная машина, инструмент который, получая энергию от собственного привода, воздействует на объект обработки обычно в вибрационном или виброударном режимах звуковых (20-100 ГЦ) и ультразвуковых частот (18-22 кГц до 2-103кГц) колебаний.

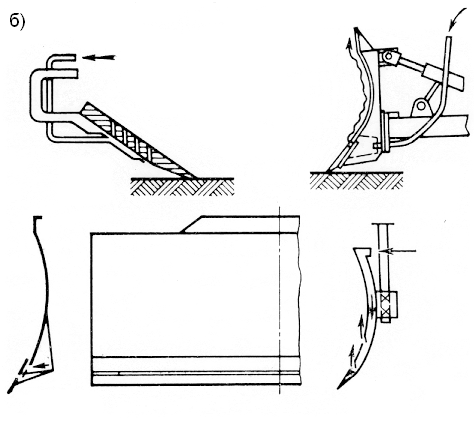
Рис. 3.23. Рабочие органы активного действия:
а) виброударный молот; б) бульдозерный отвал с подводом сжатого воздуха
В ряде активных рабочих органов механическое воздействие на объект обработки заменяется на воздействие импульсного потока рабочей среды, создаваемого в устройствах, называемых импульсными генераторами.
3.2.7. Устройства управления и бортовая автоматика
|
Устройства управления и бортовая автоматика.Управление режимами работы СШ и в целом СМ производится при непосредственном участии оператора или в автоматическом режиме под его контролем. Органы управления СМ в подавляющем большинстве случаев размещаются в кабине оператора и выполнены в виде рычагов, кнопочных пультов, рулевого колеса, педалей, джойстиков. Джойстики представляют собой устройство программирования, выполненное в виде рукояти манипулятора, воздействующей на систему датчиков и микропроцессора. Ряд машин оснащен также пультами дистанционного управления. Задающие устройства систем автоматического управления могут быть расположены как на машине, так и вне ее. Так например лазерное задающее устройство устанавливают в пределах строительной площадки. Они обеспечивают управление как отдельных СМ, так и комплексов. Спутниковые системы GPS и Глонас все шире используются для управления СМ и отслеживания их местоположения |
Аппаратура автоматического управления СШ, представляет собой комплекс унифицированных и взаимозаменяемых устройств, обеспечивающих процессы получения, обработки и отображения информации. В основе блочно-модульного принципа построения лежит принцип унификации выходных сигналов.
Аппаратура автоматического управления СШ включает следующие группы устройств.
|
Датчики – информационные устройства изменения значений контролируемых параметров и преобразование их в унифицированный сигнал, удобный для дальнейшей обработки. По исполнению датчики бывают контактными и безконтактными. |
|
Интерфейс – устройство приема, преобразования и передачи по каналам связи информации как измерительной, так и командной. В его состав входят блоки сопряжения с датчиками и блоки сопряжения с исполнительными механизмами. Это усилители – преобразователи, обеспечивающие достаточные по величине и удобные по форме сигналы на входе в контроллер и исполнительный механизм СМ. |
|
Блоки обработки информации (контроллеры)выполняются на базе микропроцессоров с наличием в них вспомогательных составляющих: постоянного запоминающего устройства для хранения программы обработки информации, оперативного запоминающего устройства для хранения промежуточных результатов и других. Такие контроллеры называют контроллерами с микро ЭВМ. Они решают задачи обработки, хранения информации, выработки команд управления в соответствии с заложенной в них программой. |
Пульты индикации и сигнализации служат для представления оператору визуальной информации о техническом состоянии узлов, агрегатов и систем машины, режимов работы, хода выполнения рабочего процесса с выдачей, в ряде случаев, рекомендаций, необходимых действий оператору. Информация представляется на табло с помощью индикаторов в виде цифр и словосочетаний. Используются также сигнализаторы, включаемые и выключаемые по потребности. Содержание сообщений раскрывается условным изображением в виде определенного символа или надписью. В случаях экстренных ситуаций предусмотрена возможность звуковых сигналов.
Пульты управления режимами работы являются частью систем управления. Для здания тех или иных режимов используется кнопочная клавиатура. Также как и пульты индексации и сигнализации они размещаются на панели управления в кабинете оператора. В ряде случаев для управления режимами передвижения их размещают на рычаге управления.
Блоки вторичного электропитания – предназначенные как для выработки напряжений 5 или 9 В, от дополнительных аккумуляторов, необходимых как для работы отдельных устройств, так и для их защиты от импульсных помех. В составе указанных блоков имеются два вида устройств – преобразователь напряжения и фильтр. Установка этих блоков осуществляется в дополнение к бортовой электрической сети СШ напряжением 12 или 24 В. позволяет обеспечивать также надежное хранение учетных данных о выполняемых работах.
На базе рассмотренных компонентов аппаратуры созданы типовые бортовые системы СМ (рис. 3.24, 3.25), решающие следующие задачи:
- экспресс-диагностирование состояния основных узлов и систем машин;
- защита от аварийных режимов включая опрокидывание;
- эргономические системы и системы безопасности оператора;
- управления приводом хода и рабочего оборудования, включающие:
оптимальное управление энергопотоком в различных режимах работы
автоматизированное управление рабочим процессом в том числе с использованием спутниковых дистанционных систем.




Рис. 3.24. Экскаваторные системы




Рис. 3.25. Системы управления автогрейдерами
Автоматика СМ обеспечивает не только точное выполнение работ, но также увеличивает производительность.
|
Задающими устройствами САУ являются: струны, лазерный луч, программы управления, передача сигнала от которых может быть осуществлена как непосредственно от струн, так и с использованием лазерных датчиков и спутниковых систем. |
Лазерные системы информационного обеспечения оператора о положении рабочего органа. Их основными компонентами являются: лазерный построитель геодезической плоскости – лазерный координатор и лазерный приемник. Приемник крепят к СМ с помощью стойки выше кабины оператора с возможностью беспрепятственного получения сигнала от лазерного наведения в диапазоне 2π рад. горизонтальной плоскости. Положение приемника по высоте может меняться оператором с помощью специального привода. В процессе работы, принимая сигналы от лазерного координатора, блоком сравнения формируются реальные отклонения рабочего органа от геодезической плоскости, отражающиеся на индикаторах пульта управления. По ним оператор способен быстро скорректировать месторасположение рабочего органа.
|
Бортовой компьютер производит сравнение реальных данных о положении рабочего органа с проектными заложенными в его память заранее и выводит отклонения на экран, дисплей или самостоятельно формирует команду на ликвидацию рассогласованных АСУ |
|
Лазерные системы автоматического управленияпозволяют проводить корректировку положения рабочего органа без оператора. Они формируются включением в состав гидропривода СМ гидрораспределителей или гидроклапанов с электромагнитным сервоприводом, а также интерфейсом управления. |
Они бывают двух типов: плоские, обеспечивают управление рабочим органом в продольной плоскости и пространственные – в пространстве. Первые в основном используются при проведении планировочных работ на горизонтальных участках, а вторые- пространственные – планировки откосов, рытье сточных канав (автогрейдер). Точность проведения работ таки системами составляет от 5 до 30 мм по высоте земляного полотна.
Более высокая точность обеспечивается при оснащении систем электронным тахеометром (ATS) с системой самонаведения и слежения за положением рабочего органа. При этом на них устанавливают специальный отражатель, информация о положении и скорости перемещения которого регулярно отслеживают тахеометром и передается бортовому компьютеру.