

3.2 Виртуальная модель асинхронного двигателя в среде matlab
По умолчанию модель асинхронного двигателя из раздела библиотеки SimPowerSystems даётся для фазного ротора (рисунок 3.13,а).
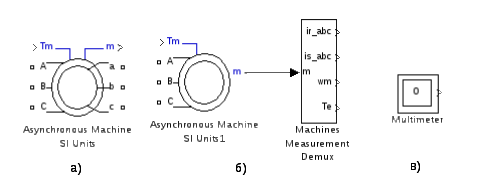
Рисунок 3.13 – Виртуальная модель асинхронной машины: а) модель в абсолютных единицах двигателя с фазным ротором; б) модель короткозамкнутого двигателя; в) измерительный инструмент
Клеммы A, B, C служат для подключения к трёхфазному напряжению, клеммы a, b, c – выходы обмотки ротора. Параметры двигателя для модификации SI Units вводятся через диалоговое окно в абсолютных единицах, которое вызывается двойным щелчком по изображению двигателя (рисунок 3.14).
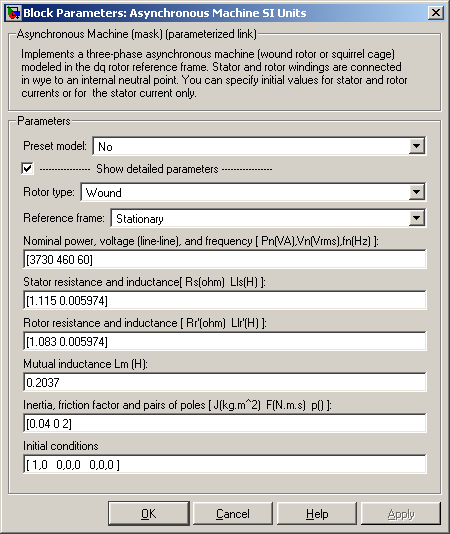
Рисунок 3.14 – Окно ввода параметров двигателя в абсолютных единицах
В строке Rotor type предлагается два варианта: Wound – двигатель с фазным ротором и Squirrel – cage – короткозамкнутый двигатель (с беличьей клеткой). В строке Reference frame предлагается три варианта выбора системы координат:Rotor – вращающаяся с ротором с одинаковой частотой; Stationary – неподвижная, наиболее естественная для нас; Synchronous – система координат, синхронно вращающаяся с частотой сетевого напряжения. Параметры асинхронного двигателя вводятся в следующие строки в абсолютных единицах.
Чаще всего применяется короткозамкнутый двигатель (рисунок 3.13,б). К выходу m подключается специальный демультиплексор Machines Measurement Demux, находящийся в разделе SimPowerSystems в подразделе Machine.
Тип машины переменного тока отражается в строке Machine type, открываемого двойным щелчком левой кнопки мыши (рисунок 3.15).
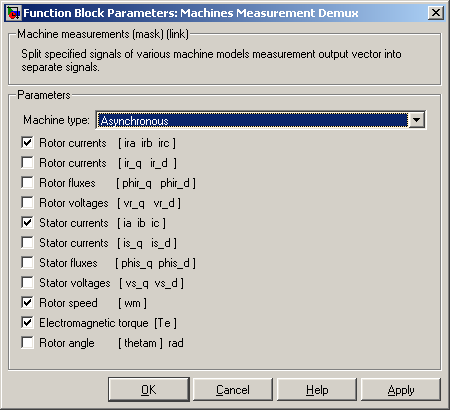
Рисунок 3.15 – Окно выбора типа машины и перечня выходных переменных
Следует иметь в виду, что эти параметры в справочниках и каталогах не приводятся, а рассчитываются с помощью различных методик, например, так, как это рассмотрено в предыдущем пункте.
По входу Tm задаётся активный момент нагрузки в Нм. По требованию программы Simulink на рабочем поле модели должен быть размещён блок Multimeter (рисунок 3.13, в), иначе процесс моделирования блокируется.
3.3 Математическое описание системы частотно – регулируемый
асинхронный электропривод – центробежный насос
Одним из наиболее эффективных путей развития энергосберегающих технологических режимов при управлении центробежными насосами является регулируемый электропривод. В настоящее время, доминирующее положение занимают частотно – регулируемые асинхронные электроприводы с системами автоматического управления, что позволяет решить не только технологические задачи насосных агрегатов, но и проблему энергосбережения [1].
Формирование требуемых статических и динамических свойств асинхронного частотно-регулируемого электропривода возможно лишь в замкнутой системе регулирования его координат, функциональная схема которого представлена на рисунке 3.16 [2].
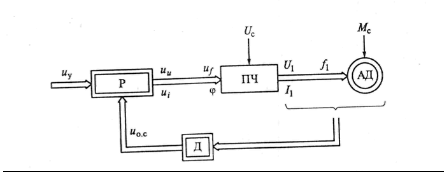
Р – регулятор; Д – датчик переменных электропривода; ПЧ – преобразователь частоты.
Рисунок 3.16 – Функциональная схема замкнутой системы ПЧ-АД.
Для увеличения диапазона регулирования по скорости в данную систему регулирования необходимо введение отрицательной обратной связи по скорости. Поэтому в математическом описании переходных процессов электропривода учитывается обратная связь по скорости. Структурная схема системы ПЧ-АД с отрицательной обратной связью по скорости будет иметь вид [2]:
Отметим, что структурная схема, в соответствии с рисунком 3.17,
является линеаризованной системой электропривода.
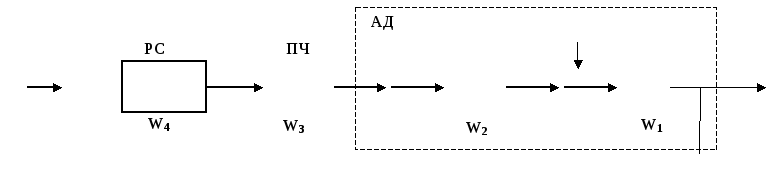
Рисунок 3.17 – Структурная схема системы ПЧ-АД с обратной связью по скорости.
На схеме приняты следующие обозначения:
β – модуль жесткости механической характеристики ;
Тэ – эквивалентная электромагнитная постоянная времени цепей статора и ротора АД;
kПЧ – передаточный коэффициент функции ПЧ;
ТПЧ – постоянная времени цепи управления ПЧ;
Тм – электромеханическая постоянная времени.
Уравнение движения, согласно передаточной функции W1 структурной
схемы, можно записать в следующем виде:
![]() ,
(3.15)
,
(3.15)
или
![]() ,
(3.16)
,
(3.16)
где
![]() приращение скорости;
приращение скорости;![]() приращение
момента;
приращение
момента;
![]() приращение
статического момента нагрузки.
приращение
статического момента нагрузки.
Согласно передаточной функции W2 будем иметь следующее
соотношение:
![]() ,
(3.17)
,
(3.17)
которое можно написать в виде дифференциального уравнения:
![]() ,
(3.18)
,
(3.18)
где
![]() приращение угловой скорости
электромагнитного поля АД.
приращение угловой скорости
электромагнитного поля АД.
Уравнение ПЧ, исходя из передаточной функции W3, запишем:
![]() ,
(3.19)
,
(3.19)
а РС ( передаточная функция W4) представим уравнением:
![]() ,
(3.20)
,
(3.20)
или
![]() ,
(3.21)
,
(3.21)
Приращение
![]() запишем в следующем виде:
запишем в следующем виде:
![]() ,
(3.22)
,
(3.22)
где
![]() - приращение задающего сигнала;
- приращение задающего сигнала;
![]() - коэффициент
обратной связи по скорости.
- коэффициент
обратной связи по скорости.
Таким образом, математическое описание частотно – регулируемого
электропривода центробежного насоса можно представить следующей
системой уравнений:
![]() ,
,
![]() ,(3.23)
,(3.23)
![]() ,
,
![]() ,
,
![]() .
.