

Лекции / Лекции (2 семестр) / VAR-SOST
.DOCЛекция 6. Метод переменных состояния.
К числу важнейших параметров, характеризующих свойства инвариантных относительно времени схем, относятся:
1. Переходная характеристика, необходимая при рассмотрении воздействия на схему сигналов произвольной формы;
2. МYП позволяет рассчитывать линейный и нелинейные схемы на постоянном и переменном токе, получил широкое распространение при расчете на ЭВМ. Однако, для указанных целей неудобен, поскольку система управлений по МУП представляет собой систему интегро-дифференциальных уравнений. Можно перейти в область изображений и получить требуемую передаточную функцию в виде дробно-рациональной функции:
H(p)=N(p)/D(p).
Для определения нулей и полюсов необходимо решать уравнения N(p)=0 и D(p)=0. Чтобы найти переходную характеристику, следует умножить D(p) на p. Далее необходимо разложить дробно-рациональную функцию и выполнить обратное преобразование Лапласа для каждого слагаемого.
Данный подход в применении к большим схемам имеет следующие недостатки:
1. Чтобы получить коэффициенты полиномов N(p) и D(p), приходиться вычислять ряд определителей, элементы которых содержат p. Такой процесс решения является нетривиальной задачей.
2. Вычисление корней уравнений N(p)=0 и D(p)=0 производиться по различным итерационным процедурам, при которых возможны значительные численные погрешности.
3. Другим источником погрешностей является процедура разложения дробно-рациональной функции в том случае, когда несколько полюсов совпадают или имеют близкие значения.
4. Вычисление производной n-го порядка при выполнении обратного преобразования Лапласа, как правило, производится через производную (n-1)-го порядка - еще один источник погрешности.
Можно ли повысить эффективность МУП? Да! Однако, это возможно лишь в том случае, когда для вычисления переходной характеристики используются соответствующие дискретные модели схем, методы численного интегрирования и методы разложения матриц. При решении задачи определения нулей и полюсов приходится прибегать к искусственным методам (например, в качестве модели катушки индуктивности применяется пара гиратор-емкость).
Все же остается ряд задач (импульсные системы), при решении которых с помощью МП возникают различные трудности.
Основная идея МЕТОДА ПЕРЕМЕННЫХ СОСТОЯНИЯ состоит в записи уравнений во временной области дифференциальных уравнений первого порядка.
Линейную инвариантную относительно времени схему представляют двумя уравнениями.
[![]() ]=
[A] * [x] + [B] * [u]
]=
[A] * [x] + [B] * [u]
[y] = [C] * [x] + [D] * [![]() ]
]
[u] - входной вектор, описывающий m независимых источников, размерности [m x 1];
[y] - вектор, описывающий i выходов (напряжений и/или токов), размерности [i x 1];
[x] - вектор, содержащий n независимых вспомогательных переменных, размерности[n x 1];
[A], [B], [C], [D] - матрицы с постоянными коэффициентами соответствующего размера, причем [A] - всегда квадратная матрица порядка n.
(1) - система n
дифференциальных уравнений первого
порядка (в общем случае взаимосвязанных),
называемая УРАВНЕНИЕМ ПЕРЕМЕННЫХ
СОСТОЯНИЯ в нормальной форме.
Вспомогательные переменные х![]() ,
х
,
х![]() ...х
...х![]() - ПЕРЕМЕННЫЕ СОСТОЯНИЯ, а [x] - вектор
переменных состояния.
- ПЕРЕМЕННЫЕ СОСТОЯНИЯ, а [x] - вектор
переменных состояния.
(2) - выходное уравнение.
Преимущества:
1. Решение таких систем широко известно в математике как в численном, так и в аналитическом виде.
2. Уравнения легко решаются на ЭВМ.
3. Как правило, число уравнений в системе (1) оказывается меньше, чем число уравнений, составленных МУП.
4. Метод может быть обобщен для решения нелинейных систем.
СТЕПЕНЬ СЛОЖНОСТИ И НАЧАЛЬНЫЕ УСЛОВИЯ.
Для любой схемы с сосредоточенными параметрами справедливы 1 и 2 законы Киргофа, а также существует соотношение между током и напряжением для каждого из элементов. Если с их помощью удается получить систему линейно независимых дифференциальных уравнений первого порядка.
[![]() ]=
[ f ( [x], t) ]
]=
[ f ( [x], t) ]
где [x] - набор из n независимых вспомогательных переменных, то говорят, что для данной схемы существует УРАВНЕНИЕ ПЕРЕМЕННЫХ СОСТОЯНИЯ В НОРМАЛЬНОЙ ФОРМЕ.
n - определяет СТЕПЕНЬ СЛОЖНОСТИ схемы.
Состояние схемы определяется минимальным набором элементов.
Набор переменных называется ПЕРЕМЕННЫМ СОСТОЯНИЯ схемы, если для него выполняются условия :
1. Состояние схемы
в любой момент времени t![]() и входные действия при t однозначно
определяют состояние схемы при любом
t> t
и входные действия при t однозначно
определяют состояние схемы при любом
t> t![]() .
.
2. переменные состояния совместно с входными воздействиями однозначно определяют значения любых переменных в схеме в любой момент времени.
Общее решение (1) должно содержать n независимых постоянных интегрирования, которые определяются с помощью n НАЧАЛЬНЫХ УСЛОВИЙ. Обычно в качестве начальных условий берутся значения переменных в момент времени t=0. При этом степень сложности схемы равна числу НЕЗАВИСИМЫХ НАЧАЛЬНЫХ УСЛОВИЙ, которые обязательно задаются в виде электрических величин, обеспечивающих получение полного решения [ x (t) ] и [ y (t) ].
Определяющими величинами для линейных схем ( на основании начальных значений которых можно получить решение для всех токов и напряжений в схеме ) являются напряжения (заряды) на конденсаторах и токи (потокосцепления) в катушках индуктивности.
Напряжения на катушках индуктивности и токи через конденсаторы не всегда обеспечивают требуемый результат. Например, при известном токе через конденсатор для расчет напряжения на нем необходимо знать не начальный ток, а начальное напряжение.
Поэтому, помимо указанных условий, переменные состояния выбирают таким образом, чтобы их начальные условия позволяли бы решать систему (1).
ОПРЕДЕЛЕНИЕ ПОРЯДКА СИСТЕМЫ УРАВНЕНИЙ ПО МПС.
Число уравнений в системе равно числу независимых напряжений на емкостях и токов, протекающих через индуктивности.
Зависимость между напряжениями и токами может возникнуть в следующих случаях :
1. СЕ - контур, образованный емкостями и независимыми источниками ЭДС.
2. LJ - сечения, образованные индуктивностями и независимыми источниками тока.
СТЕПЕНЬ СЛОЖНОСТИ
RLC цепей : n =
![]() , где
, где
b![]() - полное число конденсаторов и
индуктивностей.
- полное число конденсаторов и
индуктивностей.
n![]() - число независимых СЕ контуров.
- число независимых СЕ контуров.
n L - число независимых LJ сечений.
Две задачи : формирование уравнений в пространстве состояний и их решение.
ФОРМИРОВАНИЕ УРАВНЕНИЙ В ПРОСТРАНСТВЕ УРАВНЕНИЙ.
Подобно уравнениям, составленным по МКТ, МУП и т.д., уравнения состояния представляет из себя преобразованные к определенному виду уравнения цепи.
Задача состоит в том, чтобы получить уравнения (1) и (2). При получении (1) требуется выразить производные от переменных состояния через сами переменные состояния. Поскольку производные по времени от переменных состояния ( токи через индуктивности и напряжения на конденсаторах ) можно связать с напряжениями на индуктивностях и токами через конденсатор, задача состоит в определении связи между токами через конденсаторы и напряжениями на них, а также на индуктивностях и их токами.
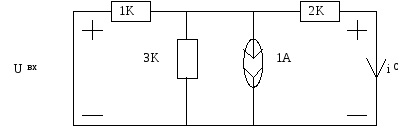
I. Наиболее общий подход к анализу цепей основан на законах Киргофа. Уравнения в пространстве состояний могут быть получены путем преобразований уравнений, записанных по законам Киргофа. Рассмотрим такой подход к получению уравнений на следующем примере :
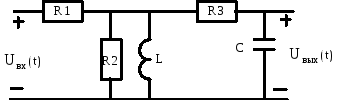
R![]() = 1K; R
= 1K; R![]() = 3K; R
= 3K; R![]() = 2K; L = 50 мГн; C = 0.01 мкФ
= 2K; L = 50 мГн; C = 0.01 мкФ
Запишем соотношения между токами и напряжением на реактивных элементах :
![]()
![]() ;
(4)
;
(4)
Выходное уравнение
:![]()
Запишем первый закон Киргофа для узла :
![]() (5)
(5)
Причем :
![]() / R
/ R![]() ;
(6)
;
(6)
Подставим (4) в (5) и (6) :
![]() (7)
(7)
![]() (8)
(8)
(7) и (8) приводим к форме Коши :
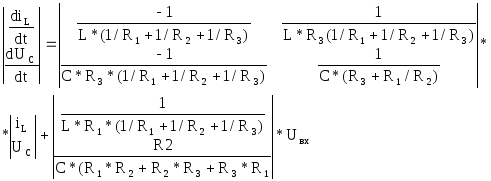
Выходное уравнение
: U![]() (9)
(9)
Из (9) и (10) можно записать матричные коэффициенты уравнения в пространстве состояний.
[x] =
![]() [u] = [U
[u] = [U![]() ];
[y] = [U
];
[y] = [U![]() ];
];
[A] =
![]() ;
[C] = [0 1]; [D] = [0];
;
[C] = [0 1]; [D] = [0];
[B] =
![]()
Недостатки :
1. Сложно для схем второго порядка.
2. Наличие взаимных индуктивностей и зависимых источников усложнит процесс получения.
3. Плохо алгоритмизуем, практически невозможно переложить на ЭВМ. При ручных расчетах высока вероятность ошибок.
II. Сведение задачи к расчету цепи по постоянному току.
Рассмотрим общий случай для схемы инвариантной относительно времени (m- число входных переменных; n - число переменных состояния; j - число входных переменных ).
Перепишем исходные уравнения :
[![]() ]=
[A] * [x] + [B] * [x]
(1)
]=
[A] * [x] + [B] * [x]
(1)
[y] = [C] * [x] + [D] * [u] +
( [D![]() ]
* [
]
* [![]() ]
+ ...) (2)
]
+ ...) (2)
Если в выходном
уравнении отсутствуют [ [ D![]() ]
* [
]
* [![]() (t) ] + ...], такая система называется
ПРАВИЛЬНОЙ. В дальнейшем будем
рассматривать исключительно правильные
системы.
(t) ] + ...], такая система называется
ПРАВИЛЬНОЙ. В дальнейшем будем
рассматривать исключительно правильные
системы.
В качестве переменных состояния выбраны напряжения на конденсаторах и токи через индуктивности :
![]()
В более компактном виде можно записать:
[P] = [Q] * [ z ] (11)
где [P] =
![]() [Q] =
[Q] = [z] =
[z] =![]() ;
;
Размерности : [P] - вектор [n+j];
[z] - вектор [m+n];
[Q] - вектор [n+j]; строк и [m+n] столбцов.
Отметим, что матрицы и векторы (11) получены из (1) и (2) простой перенумерацией элементов. Значения элементов остаются неизменными.
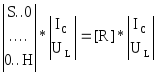
Очевидно, что элементы [Q] могут быть определены следующим образом:
q(i,l) = p(i), если z(k) =
![]() k=1,..(n+m)
k=1,..(n+m)
Это означает, что l-й столбец [Q] равен вектору [P], полученному при решении цепи, когда k-й элемент [z] единичным источником , а все остальные члены [z] приравняны к нулю. Данное решение может быть получено для эквивалентной схемы, составленной по следующим правилам:
1. Конденсаторы заменяются короткими замыканиями.
2. Индуктивности заменяются разрывами ветви.
3. Источники ЭДС заменяются короткими замыканиями.
4. Источники тока заменяются разрывами ветви.
5. Выбранный (k-й) элемент заменяется единичным источником (1В- для источников ЭДС и конденсаторов и 1А - для источников тока и индуктивностей).
6. Повторение процедуры до тех пор , когда k не превысит (n+m).
7. В результате вычислений получим токи через все конденсаторы и направление на все индуктивности. Формируем вектор [P’].
8. Переходим от токов через конденсаторы и напряжений на индуктивностях к исходным переменным состояния.
Для выполнения п.8 рассмотрим связь между напряжениями и токами на реактивных элементах.
Производные по времени от [x] можно связать токами через конденсатор и напряжениями на индуктивности.
![]() k = 1, ... K
k = 1, ... K
Или в матричной
форме: [I![]() ]
= [C] *
]
= [C] *
![]() (12)
(12)
[I![]() ]
- вектор токов через конденсаторы
размерностью [K x 1];
]
- вектор токов через конденсаторы
размерностью [K x 1];
[U![]() ]
- вектор напряжений на конденсаторах
размерностью [K x 1];
]
- вектор напряжений на конденсаторах
размерностью [K x 1];
[C] - [ K x K ] диагональная
матрица, чьи элементы определяются
соотношением C( i , j ) =
![]() (
i , j ) * C ( j )
(
i , j ) * C ( j )
Переходя к производным:
![]() (13)
(13)
[S] = [C]![]() -диагональная матрица с положительными
членами.
-диагональная матрица с положительными
членами.
Пусть схема содержит P индуктивностей, которые могут быть связными. Напряжение на j-й индуктивности представляет собой сумму, один из членов которой обусловлен протеканием тока через j-й индуктивность, другие - токами через индуктивности , связанными с j-й:
U![]() (14)
(14)
В матричной форме:
[U![]() ]
= [L] *
]
= [L] *![]() (15)
(15)
[ U![]() ] - вектор напряжений на индуктивностях
размерностью [P x 1];
] - вектор напряжений на индуктивностях
размерностью [P x 1];
[ I![]() ] - вектор токов через индуктивности
размерностью [P x 1];
] - вектор токов через индуктивности
размерностью [P x 1];
[L] - [P x P ] матрица, диагональные элементы которой являются собственными, а недиагональные члены - взаимными индуктивностями. Члены [L] могут иметь как “+” , так и “-” знаки.
Решаем (15) относительно производных:
![]() (16)
(16)
Объединяя (13) и (16) , получим:
[![]() ]=
]= (17)
(17)
[R] - квадратная матрица размерностью [(P+K) x (P+K)]. Матрица имеет более простой вид, если вектор [x] упорядочен, т.е. конденсаторы и индуктивности объединены в группы. В отсутствии взаимных индуктивностей в матрица [H], а следовательно и [R], представляет собой диагональные матрицы. Если вектор [x] упорядочен, то на главной диагонали [H] вначале будут находиться члены, обратные емкостям, далее - члены, обратные индуктивностям. Возможен и обратный порядок следования членов. При наличии взаимных индуктивностей, матрицу [H] необходимо вычислять обращением матрицы [L]. В данном случае упорядовачивание вектора [x] значительно упростит вид [H].
Используя соотношение (17), можно осуществить переход от вектора к вектору [P’] к вектору [P]. При этом следует отметить , что переход необходимо выполнить не для полного вектора [P], а для его первых n(n=P+K) членов .
Тогда :
[P![]() ]=[R]*[P
]=[R]*[P![]() ’
]
(18)
’
]
(18)
Очевидно, что при выполнении описанной процедуры следует оперировать с численными значениями элементов матриц.
Проиллюстрируем алгоритм на примере схемы, рассмотренной ранее.
Вектор переменных
состояния как и ранее: [x] = [i![]() U
U![]()
u=U![]() ;
y=U
;
y=U![]() ;
;
формируем вектор
[P] =[![]()
[P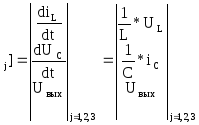
Для получения
первого столбца [Q] воспользуемся z(k)=![]() (k
, j) при j=1
(k
, j) при j=1
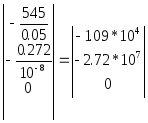
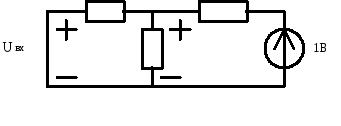
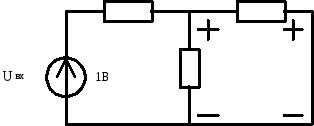
Для определения вектора [P1] эквивалентная схема будет иметь следующий вид:
![]()
U![]()
![]() =
-545 B;
=
-545 B;
i![]()
Выходное напряжение
U![]() =0
=0
Следовательно:
[P![]() ]=
]=
Аналогично для j=2, 3 ;
[P![]() ]
=
]
=
[P![]() ]
=
]
=
[Q] =
Метод применим для схем, содержащие зависимые источники. Никаких преобразований зависимых источников не производиться.
Недостатки:
1. При построении программ на основании данного алгоритма конденсатор заменяется на малое сопротивление (0.01 Oм), а индуктивность - на большое (10 Ом). Источник погрешности.
2. Дополнительный источник численной погрешности - инвертирование матриц [C] и [L].
Алгоритмы формирования уравнений по МПС, обеспечивающие меньшие численные погрешности, основаны но формировании дерева при правильном или неправильном размещении и используют, как правило, матрицу инциденций.( Л.О. Чуа, Пен-Мин-Лин. Машинный анализ электронных схем. -М.: Энергия, 1980).
III. Формирование уравнения в пространстве состояний на основании дифференциального уравнения n-го порядка.
[![]() ]=[A]
* [x] + [B] * [x]
]=[A]
* [x] + [B] * [x]
![]() Метод
Бэка.
Метод
Бэка.
Пусть имеем:
![]()
Введем обозначения:
x![]() = x
= x![]() ;
;
![]()
![]()
Тогда исходное уравнение может быть представлено в виде:
![]()
![]()
или в матричной форме:
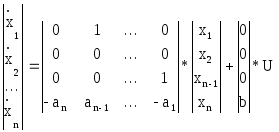
[![]() ]
= [A] * [x] + [B] * [u]
]
= [A] * [x] + [B] * [u]
РЕШЕНИЕ УРАВНЕНИЙ ПЕРЕМЕННЫХ СОСТОЯНИЯ ВО ВРЕМЕННОЙ ОБЛАСТИ.
Пусть задана схема, описываемая уравнениями (1) и (2):
[![]() ]
= [A] * [x] + [B] * [u];
]
= [A] * [x] + [B] * [u];
[y]= [C] * [x] + [D] * [u];
начальными условиями
[x(t![]() )]
и входным вектором [u(t)] при t>= t
)]
и входным вектором [u(t)] при t>= t![]() .
Требуется найти выходной вектор [y(t)]
при t>= t
.
Требуется найти выходной вектор [y(t)]
при t>= t![]() .
.
Решение выходного уравнения при известных [u(t)] и [x(t)] не вызывает трудностей. Поэтому основное внимание будет уделено решению уравнения (1), которое представляет собой линейное матричное дифференциальное уравнение с постоянными коэффициентами.
Вначале рассмотрим решение скалярного уравнения первого порядка. После получения решения методом вариации постоянных и рассмотрение свойств матричных функций, результат будет обобщен на матричное дифференциальное уравнение.
![]() =
a * x + b * u
=
a * x + b * u
Задано начальное
условие [x(t![]() )].
Требуется определить зависимость x(t)
при t>= t
)].
Требуется определить зависимость x(t)
при t>= t![]() .
Для отыскания решение воспользуемся
методом вариации постоянных.
.
Для отыскания решение воспользуемся
методом вариации постоянных.
Вначале рассмотрим тривиальный случай, когда u (t) =0, т.е. уравнение (19) - однородное. Общее решение в этом случае имеет вид:
x(t) = e![]() * K
* K
где К - произвольная постоянная.
ПриU(t)
![]() 0,
решение (19) будем искать, полагая, что К
является функцией от t:
0,
решение (19) будем искать, полагая, что К
является функцией от t:
x(t) =e![]() * K(t)
(20)
* K(t)
(20)
Поскольку предполагается, что (20) является решением (19), подставим его в исходное уравнение и после дифференцирования получим:
a * e![]() * K(t) + e
* K(t) + e![]() * K(t) = a * e
* K(t) = a * e![]() * K(t) +b * u(t); (21)
* K(t) +b * u(t); (21)
Следовательно :
![]() (t)
= e
(t)
= e![]() * b * u(t) = e
* b * u(t) = e![]() *
b * u(t) (22)
*
b * u(t) (22)
Интегрируя обе
части (22) в пределах от t= t![]() до t, получим:
до t, получим:
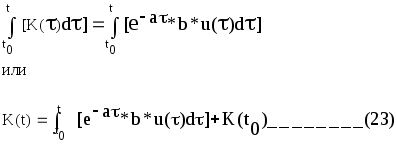
Из уравнений (20) и (23) получаем:
x(t) =
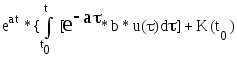 }
(24)
}
(24)
Для определения
![]() положим
из уравнения (20) t= t
положим
из уравнения (20) t= t![]() :
:
x(t![]() )
=
)
=![]() *
K (t
*
K (t![]() )
)
или K(t![]() )
=
)
=![]() * x(t
* x(t![]() )
)
Таким образом, решение уравнения (19) имеет вид:
x(t![]() )
= e
)
= e![]() *
x(t
*
x(t![]() )
+
)
+
![]() [e
[e![]() *
b * u(
*
b * u(![]() )d
)d![]() ]
(25)
]
(25)
x(t![]() )
в момент времени t= t
)
в момент времени t= t![]() является начальным условием и представляет
собой “предысторию” схемы от -
является начальным условием и представляет
собой “предысторию” схемы от -![]() до
t
до
t![]() .
.
Получение уравнение определяет поведение схемы в диапазоне времени
t![]() <=
t <
<=
t <![]() с учетом информации о входном сигнале.
с учетом информации о входном сигнале.
Выходная переменная будет определятся из уравнения:
y(t) = c * x(t) + d * u(t) = c
* e![]() * x(t
* x(t![]() )
+
)
+
реакция схемы при нулевом
входном воздействии
+ c *
 * b * u(
* b * u(![]() )
d
)
d
![]() ]
+ d * u(t)
]
+ d * u(t)
реакция схемы при нулевых начальных условиях
Решение линейного уравнения a * x = k можно представить в форме
x = a![]() *
k. Аналогично, решение системы уравнений
[A] * [x] = [k] можно представить в форме [x] =
*
k. Аналогично, решение системы уравнений
[A] * [x] = [k] можно представить в форме [x] =
![]() * [k]. Решение в обоих случаях имеют
одинаковый вид, за исключением того.
что во втором случае скалярные величины
заменяются на матричные.
* [k]. Решение в обоих случаях имеют
одинаковый вид, за исключением того.
что во втором случае скалярные величины
заменяются на матричные.
При операциях с матрицами следует помнить, что матричное умножение не является коммутативным. Кроме того, непонятно значение и свойства матричной экспоненциальной функции. Поэтому, прежде чем перейти к обобщению решения, полученного для скалярного уравнения, на матричное уравнение, необходимо определить ФУНДАМЕНТАЛЬНУЮ или ПЕРЕХОДНУЮ матрицу состояния системы:
e![]() =
[I] + [A] * t +
=
[I] + [A] * t +![]()
Можно показать,
что ряд сходится при всех значениях t .
Из разложения в ряд Тейлора следует,
что e![]() представляет собой квадратную матрицу
размерности [n x n] , элементы которой
являются функцией времени.
представляет собой квадратную матрицу
размерности [n x n] , элементы которой
являются функцией времени.