

Курс лекций по Теории механизмов и машин
Лекция №1
Общие сведения
Классификация машин.
Современное производство немыслимо без всевозможных высокоэффективных машин- устройств для преобразования энергии, движения, накопления и переработки информации.
Благодаря их использованию повышается производительность труда, облегчается физический и умственный труд человека и т. д.
По назначению машины условно подразделяются на три группы.
1.Энергетические машины, в которых какой-либо вид энергии ( тепловой, электрической и т.п.) преобразуется в механическую работу и наоборот. К этой группе относятся как машины двигатели (электродвигатели, тепловые и ядерные двигатели и т.п.), так и машины преобразователи ( компрессоры. электрические генераторы и др.).
2. Технологические или исполнительные машины, предназначенные для выполнения производственных процессов по изменению формы, свойств и положения объектов труда ( металлорежущие и ткацкие станки, полиграфические, швейные, горнодобывающие, транспортные и другие машины, роботы и т.п.).
3. Информационные машины, в которых происходит преобразование вводимой информации для контроля, регулирования и управления технологическими процессами.
Механизмы и их назначение.
Механизм-это часть машины, в которой рабочий процесс реализуется путём выполнения определённых механических движений.
Механизм – представляет собой систему подвижно связанных между собой материальных тел, предназначенных для преобразования движения и преодоления сил с помощью двигателя.
Механизм состоит из звеньев.
Звено - это одна или несколько деталей, движущихся как одно целое.
Деталь - это изделие, изготовленное без сборочных операций.
Два звена, подвижно связанных между собой, образуют кинематическую пару.
ВИДЫ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ КИНЕМАТИЧЕСКИХ ПАР
По виду относительного движения звеньев кинематические пары делятся на плоские и пространственные.
По характеру контакта звеньев кинематические пары делятся на высшие и низшие. В высшей кинематической паре контакт звеньев происходит по линии или в точке. Одно звено относительно другого имеет возможность перекатываться и скользить. В низшей кинематической паре звенья касаются по поверхности (плоскость, цилиндрическая поверхность, сфера, винтовая поверхность).
В относительном движении звеньев при этом возможно лишь скольжение.
Кинематические пары классифицируют по числу Н степеней свободы в относительном движении (число независимых подвижностей) или по числу S условий связи (ограничений), накладываемой парой на движение одного звена относительно другого. Так как для свободного тела в пространстве число степеней свободы равно шести, то величины Н и S связаны соотношением Н = 6 - S, где S = 1,2,3,4,5. При S = 0 пары не существует, а имеются два независимых тела. При S = 6 пара становится жёстким соединением деталей, т.е. одним звеном.
Ниже даны примеры наиболее распространённых кинематических пар, варианты их условных изображений на схемах.
Одноподвижные кинематические пары (Н = 1)
а) плоская, низшая, вращательная пара (плоский шарнир) –рис.1.1.
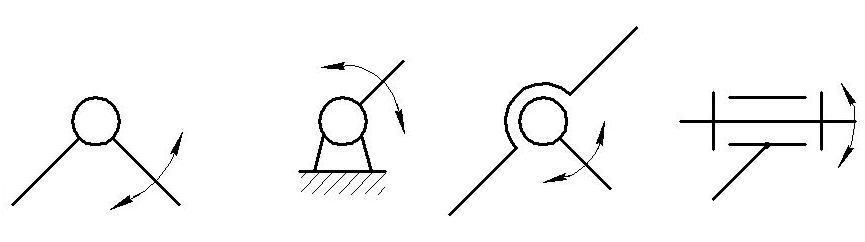
Рис.1.1
б) плоская, низшая, поступательная пара (рис.1.2).

Рис.1.2
в) пространственная, низшая винтовая кинематическая пара (рис.1.3)

В данной паре (винт-гайка) вращательное и поступательное движения одного из звеньев связаны между собой.
Рис.1.3
Двухподвижные кинематические пары (Н = 2)
а) плоская высшая кулачковая кинематическая пара (рис.1.4)

Рис.1.4
б) пространственная низшая кинематическая пара –цилиндрический шарнир (рис.1.5)

Рис.1.5
Трёхподвижные кинематические пары (Н = 3)
а) пространственная низшая кинематическая пара - сферический
шарнир
( рис.1.6)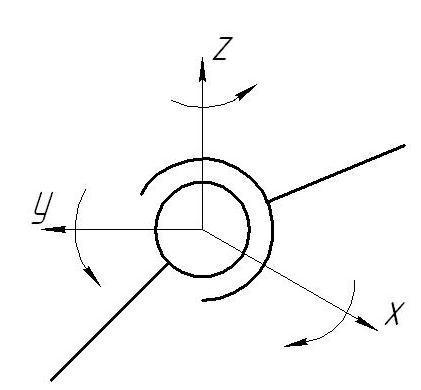
Данная пара допускает три независимых вращательных движения вокруг осей x , y, z.
Рис.1.6
б) пространственная высшая кинематическая пара (образуется при касании по линии двух цилиндрических поверхностей) –рис.1.7
 Рис.1.7
Рис.1.7
Пространственная высшая четырёхподвижная кинематическая пара ( Н=4)
Данная пара образуется при касании по линии цилиндрической поверхности и плоскости (рис.1.8).
ческая пара (
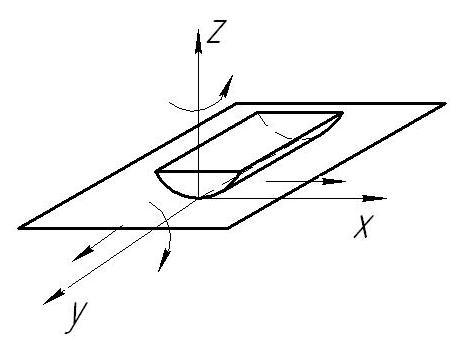
Рис.1.8
Пространственная высшая пятиподвижная кинематическая пара (Н = 5)
Данная кинематическая пара образуется при точечном контакте двух сфер или сферы и плоскости (рис.1.9).
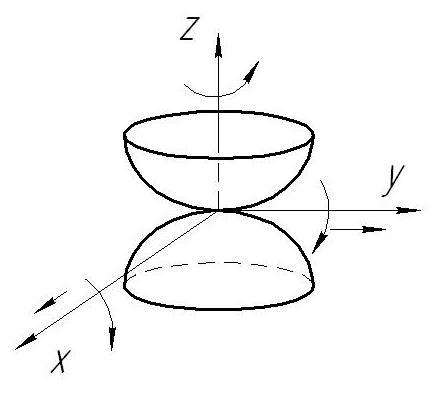 Рис.1.9
Рис.1.9