

Лекция № 13
Кулачковые механизмы
Кулачковые механизмы служат для сообщения рабочим органам машин возвратно-поступательного или качательного движения с выбранным или заданным законом движения толкателя.
Основное достоинство кулачковых механизмов заключается в том, что они позволяют сравнительно легко получить требуемый или наперед заданный закон движения толкателя путем придания соответствующего профиля кулачку. Этим объясняется весьма широкое распространение кулачковых механизмов в современном машиностроении и, в первую очередь, в различных типах автоматов и полуавтоматов. Простейший кулачковый механизм состоит из трех звеньев - кулачка, толкателя, стойки.
Для уменьшения трения между кулачком и толкателем иногда устанавливают ролик, свободно вращающийся на оси, закрепленный на толкателе.
Кулачковые механизмы бывают плоские (обычно) и пространственные (рис.13.1).
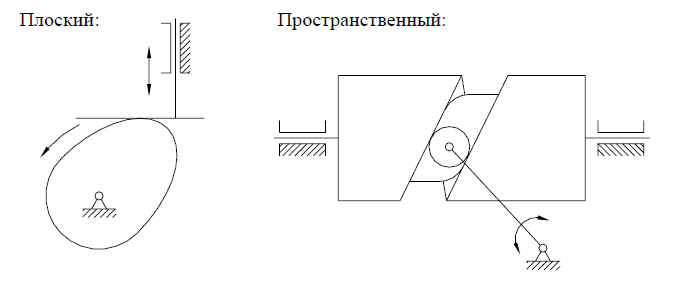
Рис.13.1
Основные типы плоских кулачковых механизмов показаны на рис.13.2.

Рис.13.2
При работе механизма возникает опасность отрыва толкателя от профиля кулачка силами инерции. Во избежание размыкания высшей пары на толкателе устанавливают пружину (рис.13.3) или выполняют конструктивно геометрическое замыкание (рис.13.1).
Элементы и параметры кулачковых механизмов. Основные обозначения.
Элементы и параметры кулачкового механизма приведены на рис. 13.3 для наиболее распространённого случая механизма с возвратно-поступательным перемещением роликового толкателя.
Теоретический профиль кулачка - это траектория, которую описывает центр ролика толкателя в своем относительном движении вокруг кулачка.
Рабочий профиль кулачка - это эквидистантная кривая по отношению к теоретическому профилю, т.е. кривая, отстоящая от последнего на расстоянии, равном радиусу ролика.
При решении различных задач анализа и синтеза кулачковых механизмов обычно рассматривают контакт теоретического профиля кулачка с центром ролика толкателя. Такая замена существенно упрощает решение задачи профилирования кулачка.
Элементы кулачкового механизма (рис. 13.3) и основные расчетные величины имеют следующие обозначения:
S и S mac - текущее и наибольшее перемещение толкателя, мм;
S'S'mac- аналоги текущей и наибольшей скорости толкателя, мм;
S" и S"max- аналоги текущего и наибольшего ускорения толкателя, мм;
 -
угловая
скорость кулачка, с " ;
-
угловая
скорость кулачка, с " ;
 -
текущий
угол поворота кулачка, град;
-
текущий
угол поворота кулачка, град;
 Рис.13.3
Рис.13.3
 уд
(
уд
( пр)-
фазовый угол поворота кулачка,
соответствующий переходу толкателя
от начальной до конечной точек удаления
(приближения), град;
пр)-
фазовый угол поворота кулачка,
соответствующий переходу толкателя
от начальной до конечной точек удаления
(приближения), град;
 дс(
дс( бс)
- фазовый
угол поворота кулачка, соответствующий
неподвижному положению
толкателя в дальнем (ближнем) положении,
град;
бс)
- фазовый
угол поворота кулачка, соответствующий
неподвижному положению
толкателя в дальнем (ближнем) положении,
град;
е- эксцентриситет, мм;
г„ - радиус начальной шайбы-окружности, по которой очерчен участок ближнего стояния теоретического профиля, мм;
 уд
(
уд
( пр)-
центральный
профильный угол между наибольшим и
наименьшим радиусами-векторами
теоретического профиля, ограничивающими
кривую удаления (приближения)
кулачка, град;
пр)-
центральный
профильный угол между наибольшим и
наименьшим радиусами-векторами
теоретического профиля, ограничивающими
кривую удаления (приближения)
кулачка, град;
 дс
(
дс
( бс)-
профильный
угол, ограничивающий профиль кулачка,
очерченный дугой
окружности из центра его вращения, град;
бс)-
профильный
угол, ограничивающий профиль кулачка,
очерченный дугой
окружности из центра его вращения, град;
гр - радиус ролика толкателя, мм;
а - текущий угол давления - угол между нормалью к профилю кулачка в точке контакта и направлением абсолютной скорости толкателя, град.
Общие принципы проектирования кулачкового механизма.
При проектировании кулачковых механизмов должны быть заданы или определены:
-схема механизма;наибольшее перемещение толкателя (линейное или угловое) -фазовые углы поворота кулачка;
-
закон движения кулачка;
-
закон движения толкателя;
-
размеры механизма, характеризующие данную схему;
-
координаты точек профиля кулачка.
Выбор схемы кулачкового механизма, величин Smac и фазовых углов поворота кулачка определяются конструктивными соображениями и определенным технологическим процессом, который выполняется машиной.
Закон движения кулачка при выбранной схеме механизма определяется также конкретными условиями работы всей машины или данного механизма. В подавляющем большинстве случаев кулачок вращается в одном направлении с постоянной угловой скоростью.
Выбор закона движения толкателя
Под
законом движения толкателя S=S( )
понимается
зависимость между перемещением
толкателя и углом поворота кулачка.
)
понимается
зависимость между перемещением
толкателя и углом поворота кулачка.
Иногда закон движения толкателя диктуется самим технологическим процессом машины. При более широкой возможности выбора закона движения толкателя последний стремятся выбрать таким, чтобы он гарантировал наименьшие инерционные нагрузки на звенья механизма. Поэтому при проектировании кулачкового механизма закон движения толкателя задают кривой его аналога ускорения наиболее целесообразного вида и затем интегрированием находят закон изменения аналога скорости, а вторичным интегрированием - закон движения толкателя, являющийся исходным для профилирования кулачка. В общем случае закон перемещения толкателя, характер изменения которого представлен на рис. 13.4, можно представить в виде:
S=M*S
max+N*R( ). (13.1)
). (13.1)
Аналог
скорости толкателя S
'=N*R'
( ). (13.2)
). (13.2)
Аналог
ускорения толкателя S"=N*R"( ). (13.3)
). (13.3)

Рис.13.4
Величины М ,N приведены в табл.13.1 и зависят от угла φ .
|
Фаза движения толкателя
|
Угол поворота кулачка φ,град. |
М |
N |
Ф, град. |
γ, град. |
|
Удаление
|
0≤φ≤φуд
|
0
|
1
|
φуд
|
φ
|
|
Дальнее стояние
|
φуд ≤ φ ≤ φуд + φдс
|
1
|
0
|
φдс
|
0
|
|
Приближе-ние
|
φуд + φдс ≤ φ ≤ φуд + φдс+ φпр
|
1
|
-1
|
φпр
|
φ - φуд- φдс
|
|
Ближнее стояние
|
φуд + φдс+ φпр ≤ φ ≤360
|
0 |
0 |
φбс |
0 |
Табл.13.1
Функция
R( )
определяет
выбранный закон движения на участке
удаления или
приближения
толкателя.
)
определяет
выбранный закон движения на участке
удаления или
приближения
толкателя.
Большинство используемых законов движения можно разбить на три группы:
а) работа с «жёстким» ударом.
В качестве примера может быть приведён линейный закон движения
Он используется в тех случаях, когда необходимо движение ведомого звена с постоянной скоростью. Например, движение суппорта в металлорежущем станке - автомате. При этом функция R и ее первая производная имеют вид:
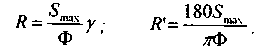
Углы γ и Ф определяются в градусах по таблице 13.1 в зависимости от угла φ.
На рис.13.5 изображены графики перемещения, аналогов скорости и ускорения толкателя. Скорость толкателя, остающаяся неизменной в пределах всей фазы угла φ уд , мгновенно возрастает от 0 в начале движения и также мгновенно уменьшается в конце. При этом ускорение в начальной и конечной точке равно бесконечности. В механизме появляются так называемые "жесткие" удары, в результате которых силы инерции, действующие на звенья, возрастают теоретически до бесконечности, что недопустимо. Поэтому использование линейного закона возможно лишь при ведущего звена. небольших угловых скоростях.
В практике при использовании линейного закона в начале и конце участков движения используются переходные кривые, с помощью которых силы инерции сводятся до желаемой величины (см. работу [1])
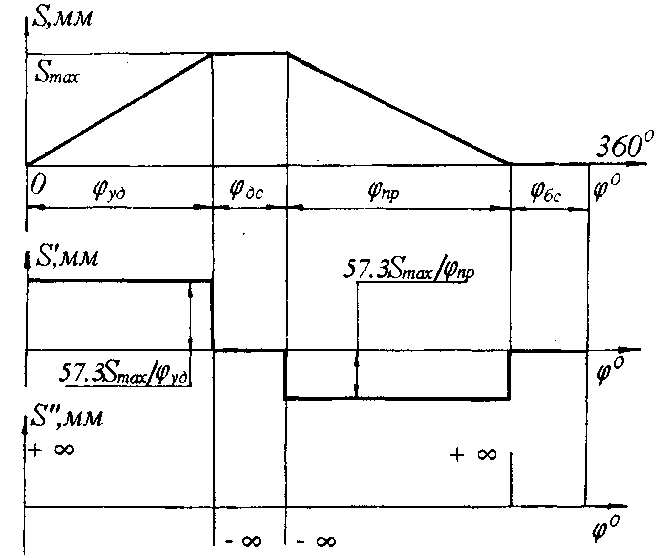 Рис.13.5
Рис.13.5
б) работа с «мягким» ударом.
В качестве примера рассмотрим косинусои дальный закон изменения ускорения толкателя.
Функция R и ее производные имеют вид:
R = 0,5Smac(l-cos(πγ/Ф)), R'=90Smaс/Ф*sin(πγ/Ф),
R"= 0,5*Smac*(180/Ф)2 *cos(πγ/Ф). Углы γ и Ф определяются в градусах по таблице 13.1в зависимости от угла φ.
На рис. 13.6 показаны графики перемещения, аналога скорости и ускорения толкателя и показан способ их построения.Из графиков видно, что при косинусоидальном законе скачок ускорения и, соответственно, сил инерции ("мягкий" удар) толкателя происходит на конечную величину в начале и конце участка. Это позволяет его использовать при значительно больших скоростях.
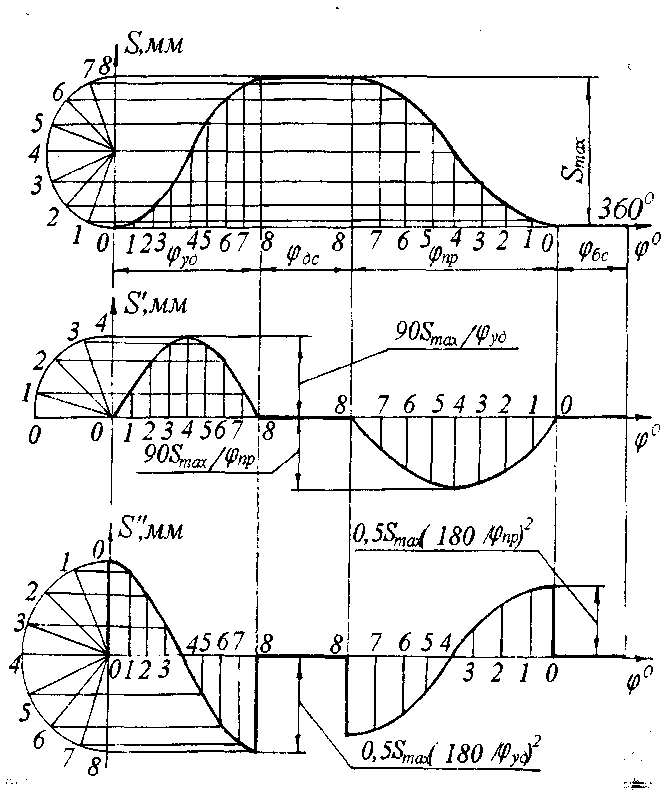
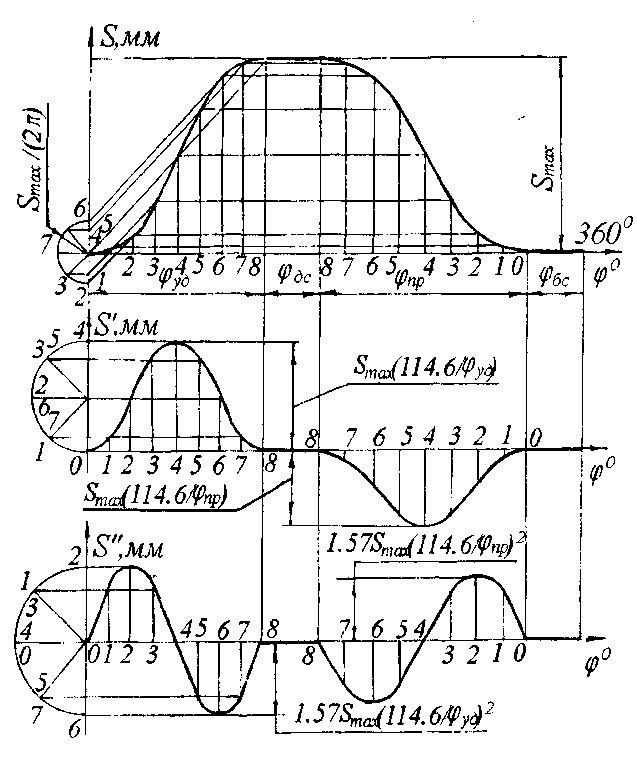
Рис.13.6
в) безударная работа толкателя.
В качестве примера синусоидальный закон изменения ускорения толкателя.
R=Smac(γ/Ф-(Sin(2πγ/Ф))/2π) ;
R'=180* Smac (1-Cos(2πγ/Ф))/(πФ); R"=2Smac (180/Ф)2Sin(2πγ/Ф))/π.
Углы γ и Ф определяются в градусах по таблице 13.1 в зависимости от угла φ.
Характер графиков перемещения, аналогов скоростей и ускорений толкателя при синусоидальном законе приведён на рис.13.7. Здесь же показан и способ графического построения.
Синусоидальный закон ускорения толкателя обеспечивает теоретически безударную работу толкателя. Однако максимальные величины ускорений при этом будут приблизительно в 1,3 раза больше, чем при косинусоидальном законе ускорений.
 Рис.13.7
Рис.13.7