

Выравнивание фигуры по модели
В этом уроке положение фигуры будет настроено по персонажу подгонкой частей средствами move, rotate и scale.

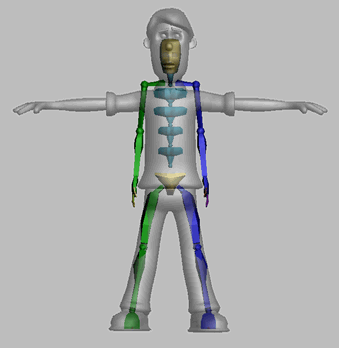
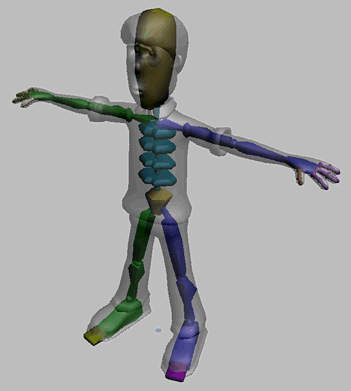
В правильном положении торс фигуры, руки и ноги точно внутри сети. Пальцы рук и ног чуть торчат из сети, облегчая настройку оболочки в дальнейшем.
При настройке фигуры должен быть включен режим Figure. Этот режим говорит 3ds Max, что идет настройка положения фигуры, а не анимация.
Персонаж, который будет использован в этом уроке, имеет вид человека, и не требует придатков, хвоста и хвостиков.
Настройка урока:
Загрузка align_wilson_start.max из папки \tutorials\character_animation\physique_basics.
В сцене модель человека с именем Wilson.
 Модель
Wilson
Модель
Wilson
Модель имеет четыре коротких пальца. Wilson носит башмаки, пальцы ног не видны.
Подготовка модели:
Работа с фигурой будет упрощена, если создать набор для выделения сети, сделать его полупрозрачным и заморозить.
Выбор всей модели.
В поле Named Selection Sets на главной панели ввод имени Wilson Mesh.
В свитке Display Properties на панели Display включение See-Through.

Модель сереет. Полупрозрачность позволяет видеть фигуру внутри модели.
В свитке Display Properties на панели Display выключение Show Frozen in Gray.
Это позволяет модели удержать часть своей раскраски при замораживании.
В свитке Freeze на панели Display щелчок Freeze Selected.
Модель заморожена и не может быть нечаянно выбрана при работе с фигурой.
Создание фигуры:
Панель Create > Systems > Biped.
Вытягивание фигуры в окне Front от стоп модели по ее росту.

Поскольку Wilson носит обувь, нет смысла иметь отдельные пальцы. Фигуре будет дан один палец ноги и одна фаланга для управления ботинком.
В свитке Create Biped ввод Toes = 1 и Toe Links = 1. Коротким пальцам хватит двух фаланг.
Ввод Set Fingers = 4 и Finger Links = 2.
Ввод Neck Links = 1. (Шея Wilson коротка, одной связи шеи достаточно.)
Настройка положения фигуры:
 Переход
на панель Motion.
Переход
на панель Motion.
 В
свитке Biped
включение режима Figure.
В
свитке Biped
включение режима Figure.
Если свитка Biped на панели Motion нет, выбор любой части фигуры вызовет его.
Select the center of mass (COM), the blue tetrahedron at the center of the biped’s pelvis.
Примечание:
![]()
![]()
![]() Быстро
выбрать
COM можно
кнопками
Body Horizontal, Body Vertical или
Body Rotation в
свитке
Track Selection.
Быстро
выбрать
COM можно
кнопками
Body Horizontal, Body Vertical или
Body Rotation в
свитке
Track Selection.
В окне Front смещение COM в центр бедер модели.

Проверка положения COM внутри бедер фигуры во всех окнах.
 Правильное
положение COM
в окне Left
Правильное
положение COM
в окне Left
Положение ног:
Выбор верхних и нижних частей обеих ног.
В окне Front масштабирование обеих ног с выравниванием стоп по стопам модели.

Выбор бедер, поворот бедер, чтобы ноги фигуры были параллельны ногам сети.
Ноги фигуры должны идти по центру ног сети, однако для этого нужно масштабировать таз.
Выбор таза фигуры, оранжевого треугольника вокруг COM.
масштабирование таза по локальной оси Z, чтобы ноги фигуры пошли по центрам ног сети.

Повторение действий с ногами и тазом, пока ноги не встанут точно на середину ног сети.
Масштабирование ног:
В окне Left правый щелчок имени окна и выбор Edged Faces, чтобы видеть на штанах колени.
Масштабирование и поворот бедер, пока сустав колена не совпадет с коленом в сети штанов.

До сих пор обе ноги настраивались одновременно. Можно настроить сначала одну ногу или руку, затем сохранить и передать на другую сторону.
В окне Front выбор икры и масштабирование, пока лодыжка не встанет на срез штанины.
Масштабирование стопы с совмещением по низу стопы сети.

Выбор настроенной икры и стопы.
 В
свитке Copy/Paste
включение Posture.
Щелчок
Copy Posture.
В
свитке Copy/Paste
включение Posture.
Щелчок
Copy Posture. Щелчок
Paste Posture Opposite.
Щелчок
Paste Posture Opposite.
 Теперь
ноги
совпадают.
Теперь
ноги
совпадают.
Проверка в окне Left положения лодыжки внизу ноги. Можно изменить Ankle Attach (соединение лодыжки) в свитке Structure до 0.2 или 0.25 для совпадения лодыжки с ногой.
В окне Left поворот бедер, икр и стоп с выравниванием по модели.

Файл align_wilson_legs.max содержит положение фигуры на данный момент.
Настройка рук и спины:
Выбор плеча фигуры.
В окне Front поворот плеча вверх до параллельности руки руке модели без подгонки.

Выбор всех связей спины и создание набора с именем Biped Spine.
В окне Front масштабирование спины с установкой руки на место.


 выбор
настроенного
плеча.
В
свитке Copy/Paste
копирование и вставка этой позы на
другую сторону фигуры с использованием
Copy
Posture
и Paste
Posture
Opposite.
выбор
настроенного
плеча.
В
свитке Copy/Paste
копирование и вставка этой позы на
другую сторону фигуры с использованием
Copy
Posture
и Paste
Posture
Opposite.Выбор связей спины – набор Biped Spine. В окне Left малый поворот связей для совпадения с кривизной спины. Можно сдвинуть нижний позвонок для правильного выравнивания.

Важно: Не следует крутить COM при настройке позы. Следует брать нижнюю связь.
Теперь спина изогнута правильно, руки могут уйти из положения.
Выбор набора связей спины и масштабирование в окне Front до возврата рук на место.
Проверка в окне Left следования спины торсу персонажа.
Повторение действий для окончательной настройки спины и рук по сети.
В окне Front и Left масштабирование позвонков с подгонкой по сети.
Следует довести размер каждого позвонка до 2/3 от размера сети.
Положение рук:
Настройка позиции рук начинается с кости ключицы, которая связана с торсом. Правильная настройка масштаба этой кости упростит настройку оболочек локтя и плеча позже.
выбор ключицы. В окне Front легкое масштабирование по ее оси X, чтобы сустав плеча фигуры попал в центр плеча сети.
 Left
(blue) clavicle scaled slightly
Left
(blue) clavicle scaled slightly
В окне Top работа с частями той же руки. Масштабирование и поворот костей руки для подгонки по сети с особым вниманием к положению локтя и запястья.
 Положение
руки
в
окне
Top
Положение
руки
в
окне
Top
Tip: Быстрое перемещение по иерархии дают клавиши Page Up и Page Down.
В окне Front при необходимости поворот руки для следования по сети.
Выбор ключицы, плеча и предплечья, и copy/paste позы на другую сторону фигуры.
Файл file align_wilson_arms.max содержит положение фигуры до этого места.
Положение кистей рук:
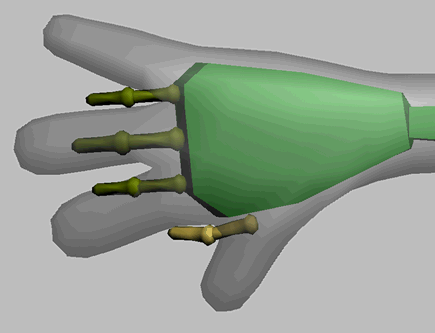
Настройка пальцев является самой трудоемкой частью установки фигуры. Каждый сустав пальца следует двигать и крутить отдельно.
Можно крутить каждый сустав пальца. Однако двигать можно только основания пальцев.
Быстрее всего сначала поставить на место основание каждого пальца, затем поворачивать и масштабировать фаланги.
В окне Top, Front, и User настройка вида кисти руки.
В окне Top небольшой поворот кисти руки для лучшего соответствия сети.
Масштабирование кисти, чтобы ладонь достигла начала мизинца (pinky finger).
В окне Left при необходимости поворот кисти для подгонки по центру сети кисти.
В окне Top смещение основания большого пальца и других пальцев до совмещения с пальцем сети. Повороты потом.

Поворот основания каждого пальца по пальцу сети.

Масштабирование фаланг, чтобы каждая часть занимала полпальца сети, а последняя фаланга чуть высовывалась из сети. Это упрости т настройку оболочек.
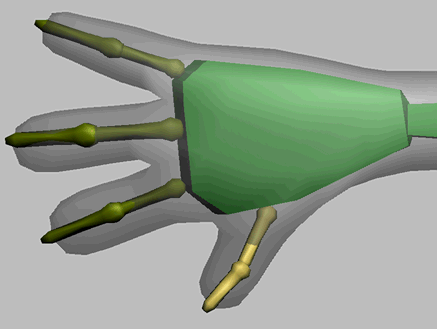
В окне Top и Front настройка длины и ширины каждого пальца до 2/3 от размера пальца сети.
В виде User поворот фаланг по пальцам сети. Осмотр кисти под разными углами и правка.

Нет рецепта для настройки кисти руки. Следует изучать кисть под разными углами с настройкой костей по центру пальцев. Кости большого пальца особенно важны, поскольку вращаются независимо от остальных пальцев.
После настройки кисти, выделение всех костей кисти, и copy/paste на другую руку.
Проверка костей другой руки. Возможна небольшая подгонка.
Когда сеть симметрична, кости кисти руки после вставки на другой стороне должны быть подогнаны точно. Однако сети не всегда точно симметричны. Кроме того, кисть не будет вставлена точно, если центр массы не точно в центре.
Файл align_wilson_fingers.max содержит положение фигуры на этот момент.
Поза головы и стопы:
В окне Left поворот и масштаб связи шеи до выравнивания подбородка по сети. Без поворота головы.
В окне Front масштаб головы до половины ширины головы сети и до ее полной высоты.

В окне Top поворот стопы фигуры до совпадения с углом стопы персонажа.
В окне User и Left масштаб стопы и кости пальца до соответствия объему ботинка. При затруднении с выделением кости пальца можно выбрать стопу и нажать Page Down.

Завершение позы:
При необходимости масштабирование частей фигуры до 2/3 ширины сети.
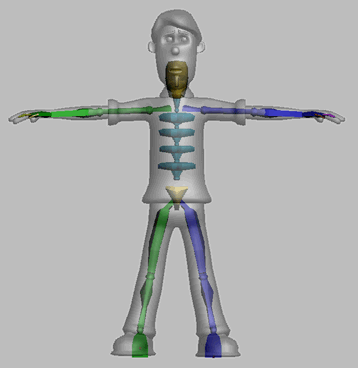
 Настройка
положения фигуры завершена.
Настройка
положения фигуры завершена.
Выбор всей фигуры и создание набора с именем Wilson Biped.
Примечание: Именованный набор следует создавать после окончания настройки фигуры. Если создать набор в начале настройки, при изменении параметров свитка Structure с добавлением частей во время настройки, добавленные части в набор не войдут.
В свитке Biped в поле Name ввод Wilson Biped.
Все части фигуры получаю впереди Wilson Biped.
Примечание: Наличие у фигуры своего имени помогает при вставке в сцену с другими персонажами. Не возникнет запроса о переименовании при повторении имени.
Сохранение позы:
Выбор набора Wilson Mesh и щелчок Yes в диалоге предупреждения.
На панели Display отключение See-Through.
Сохранение сцены: Save as my_wilson_pose.max.
Настроенную позу содержит файл align_wilson_complete.max.