

Обработка изображений / Лекции по обработке изображений Ч 2
.pdfПусть |
fi, j – значение |
яркости изображения – |
полезного |
сигнала на |
|||||
пересечении |
i -ой строки и |
j -го столбца, а наблюдаемое на входе фильтра |
|||||||
изображение описывается моделью: |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
gi, j T ( fi, j , ni, j ), |
i 0, I 1, j 0, J 1. |
(3.1) |
||||||
Здесь ni, j - значение помехи в точке с координатами |
(i, j) , f ( ) |
– функция, |
|||||||
описывающая взаимодействие сигнала и помехи, а I |
и J – соответственно |
||||||||
число строк и столбцов в кадре. |
|
|
|
|
|
|
|
||
В дальнейшем будем придерживаться принятой при цифровой обработке изображений декартовой системы координат с началом в левом верхнем углу кадра и с положительными направлениями из этой точки вниз и вправо. На рис. 3.1 показаны примеры окрестностей различных типов, изображенные в виде совокупностей точек. Центром окрестностей, рабочей точкой, в которой осуществляется обработка, является точка с координатами i, j (на рис. 3.1 не
зачернена). В зависимости от типа окрестности различают каузальную, некаузальную и полукаузальную фильтрацию изображений. Понятие
а) |
б) |
|
в) |
|
Рис. 3.1 Примеры окрестностей различных видов |
|
|
|
|
каузальности |
(причинно-следственной |
зависимости) |
связывают |
с |
соотношением координат текущей точки i, j |
и точек, входящих в окрестность. |
|||
Если обе координаты (номер строки и номер столбца) всех точек окрестности не превышают соответствующих координат текущей точки, то окрестность и использующая ее обработка называются каузальными. Пример такой окрестности представлен на рис. 3.1,а.
Некоторые точки окрестности, приведенной на рис. 3.1,б, удовлетворяют принципу каузальности. Вместе с тем, здесь имеются и такие точки, обе координаты которых превышают соответствующие координаты рабочей точки. Фильтрация, опирающаяся на использование окрестностей с сочетанием таких свойств, называется некаузальной.
Окрестности, показанной на рис. 3.1,в, соответствует полукаузальная фильтрация. Одна из координат всех точек окрестности – в данном примере номер строки – не превышает соответствующей координаты рабочей точки. Вторая же координата – в примере номер столбца – у некоторых точек также не превышает соответствующей координаты рабочей точки. Однако среди точек окрестности имеются и такие, у которых эта вторая координата превышает
31
соответствующую координату рабочей точки.
Смысл, заложенный в данную классификацию, состоит в том, что, согласно принципу причинности, на формирование отклика физически осуществимого фильтра не могут оказывать влияния элементы входного сигнала, не поступившие к моменту формирования выходного отсчета. Этот принцип естественным образом «работает» в динамических системах, где все происходящие в них процессы являются временными процессами. При цифровой обработке изображений часто приходится иметь дело с ранее сформированными изображениями, уже хранящимися в памяти устройства обработки. В этом смысле соотношение координат, строго говоря, уже не играет такой принципиальной причинной роли, как при обработке сигналов в реальном масштабе времени. Вместе с тем, традиционно сложилась описанная выше классификация процедур обработки изображений, которой, в определенной мере, будем придерживаться и мы в последующем изложении.
При линейной фильтрации выходной эффект определяется линейной комбинацией входных данных:
f (i, j) a(i1 , j1 ) g(i i1 , j j1 ) . |
(3.2) |
(i1 , j1 ) S |
|
В этом выражении f (i, j) f – результат фильтрации полезного сигнала |
|
|
i, j |
f (i, j) fi, j |
в точке кадра с координатами (i, j) ; S - множество точек (точнее – |
множество |
их координат), образующих окрестность; a(i1, j1 ) – весовые |
коэффициенты, совокупность которых представляет собой двумерную импульсную характеристику (ИХ). Если область S конечна, то импульсная характеристика имеет конечную длину и фильтр называется КИХ-фильтром. В противном случае импульсная характеристика имеет бесконечную длину, а фильтр название БИХ-фильтра. В выражении (3.2) принято, что ИХ не зависит от координат точки (i, j) , в которой определяется выходной эффект.
Процедуры обработки изображений, обладающие свойством независимости от координат, называются однородными.
Наиболее распространенным критерием оптимальности, применяемым для оценки качества обработки, является критерий минимума среднего квадрата ошибок. Применительно к фильтрации запишем его выражение в виде:
|
|
|
|
, j j1 ) |
2 |
|
|
|
|
E f (i, j) a(i1 , j1 ) g(i i1 |
|
|
min , |
(3.3) |
|||
|
|
|
|
|
|
|
a ( ) |
|
где E |
|
(i1 , j1 ) S |
|
|
|
|
|
|
– символ |
математического |
ожидания. Согласно (3.3) |
отыскание |
|||||
оптимального фильтра заключается в определении его ИХ таким образом, чтобы средний квадрат ошибки (i, j) f (i, j) f (i, j) , выражающей различие между сигналом f (i, j) и оценкой f (i, j) , формируемой фильтром, был
минимальным. Математическое ожидание вычисляется по всем случайным величинам, содержащимся в (3.3), что означает ориентацию критерия на учет
32
средних ошибок.
3.2. Линейная пространственная фильтрация изображений
Преобразования, в которых каждый отсчет выходного изображения зависит от значений входного сигнала в некоторой его окрестности, объединим под общим названием – пространственная фильтрация. Большинство методов фильтрации может быть описано в терминах либо пространственной, либо частотной области. Для пространственной фильтрации изображений на ЭВМ используются так называемые маски, по существу представляющие собой КИХ-фильтры. В ряде алгоритмов аналог маски фильтра называют структурным элементом. В иностранной литературе для обозначения маски также используют термин скользящее окно (sliding window). В прикладных системах цифровой обработки изображений для обеспечения приемлемого быстродействия обычно ограничиваются при задании импульсных характеристик матрицами малого размера: 3 3 , либо 5 5 элементов.
Как и в случае локальных преобразований, фильтрацию применяют либо для целей восстановления некоторого «истинного» изображения либо для улучшения зрительного восприятия тех или иных особенностей исследуемого изображения. В теории обработки изображений разделяют линейные и нелинейные фильтры. В первую группу входят преобразования, реализуемые в виде линейной свертки входного изображения с некоторой матрицей постоянных коэффициентов.
Выделение линейных операций в самостоятельный класс оправдано тем, что: во-первых, многие физические механизмы формирования изображений линейны по своей природе; во-вторых, для исследования свойств линейных преобразований фильтрации разработан удобный аппарат частотных передаточных функций; в-третьих, линейные алгоритмы просты и удобны для реализации на ЭВМ и в специализированных устройствах обработки сигналов. Масочная фильтрация изображений будет линейной, если используются маски с независимыми от изображения коэффициентами.
Термином «нелинейная фильтрация» в литературе по обработке изображений обозначают алгоритмы пространственной фильтрации, не являющиеся в строгом смысле сверткой. Нелинейные алгоритмы часто позволяют достичь более приемлемых для пользователя результатов, но, как правило, ценой больших временных затрат. К тому же, сам результат сложно интерпретировать из-за отсутствия какого-либо обоснованного универсального формализма для оценки эффективности нелинейных алгоритмов. Масочная фильтрация изображений будет нелинейной, если используются маски с зависимыми от изображения коэффициентами.
Процедуры линейной фильтрации, осуществляются с помощью матриц взвешивающих коэффициентов. Прежде всего, это процедуры, направленные на подавление шумов. Изображения могут повреждаться шумами и помехами различного происхождения: шумами видеодатчиков, шумом зернистости фотоматериала, ошибками в каналах передачи. Поскольку шум пространственно декоррелирован, то в его спектре, как правило, содержаться
33
более высокие частоты, чем в спектре неискаженного шумами изображения. Отсюда следует, что НЧ фильтрация является достаточно эффективным средством подавления шумов. Для ослабления действия помех применяются следующие маски, реализующие НЧ фильтрацию:
|
1 |
1 |
1 |
|
|
1 |
1 |
1 |
|
1 |
2 |
1 |
|||
а) 1/9 |
|
|
|
, б) 1/10 |
|
|
|
|
|
, в) 1/16 |
|
|
|
|
|
1 |
1 |
1 |
|
1 |
2 |
1 |
|
2 |
4 |
2 |
|
||||
|
|
1 |
|
|
|
1 |
1 |
1 |
|
|
|
1 |
2 |
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|||||||
Рис. 3.2. Матрицы коэффициентов линейных фильтров для подавления шумов
Эти маски нормированы для получения единичного коэффициента передачи, чтобы процедура подавления шума не вызывала смещения средней яркости обработанного изображения. Здесь полезно отметить определенное разногласие в оценках качества, даваемых человеческим глазом и применяемыми количественными показателями. Глаз является слишком совершенным изобретением природы, чтобы с ним могли соревноваться достаточно примитивные математические показатели типа среднего квадрата ошибок. Поэтому некоторые результаты, рассматриваемые с точки зрения математических показателей как катастрофические, визуально могут быть вполне удовлетворительными. Означает ли это, что математические критерии вообще непригодны при цифровой обработке изображений? Конечно, нет. Цифровая обработка изображений находит применение в различных информационных системах с автоматическим принятием решений, основанным на этой обработке.
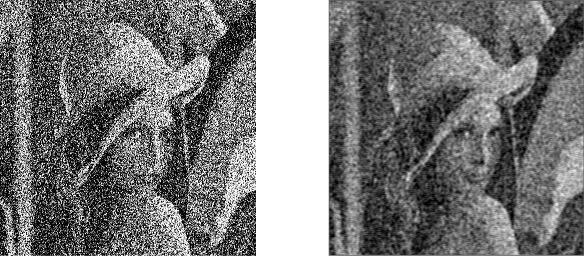
На рис. 3.3,а показан зашумленный портрет при отношении сигнал/шум равном 1. Результат фильтрации приведен на рис. 3.3,б.
а) |
б) |
Рис. 3.3. Пример масочной фильтрации
Функционирование таких систем, где отсутствует человеческий глаз,
34
полностью подчинено математическим критериям и качество их работы оценивается только математическими показателями. Понятно, что и качество изображений, используемых в этих системах, также должно оцениваться только математическими критериями.
В заключение подчеркнем, что в целом применение описанных процедур фильтрации приводит к существенному снижению уровня шума на изображении. Коэффициент улучшения тем выше, чем сильнее шум на исходном изображении. Таким образом, для подавления шумов на изображении применяются маски с положительными коэффициентами.
Низкочастотная фильтрация приводит к эффекту размытия изображения, моделируя с некоторым приближением режим расфокусировки в изображающих системах.
Высокочастотная фильтрация, напротив, «фокусирует» изображение, удаляя размытость и подчеркивая резкие детали. Операции линейной высокочастотной фильтрации для подчеркивания границ осуществляются, например, путем задания следующих коэффициентов КИХ-фильтров:
0 |
1 |
0 |
1 |
1 |
1 |
|
1 2 |
1 |
||
а) |
1 5 |
1 |
, б) |
1 |
9 1 |
, в) |
2 5 |
2 . |
||
|
0 |
1 |
0 |
|
1 |
1 |
1 |
|
1 2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
Преобразование Собела фактически является одним из возможных вариантов численной аппроксимации процедуры двумерного дифференцирования. Будучи знакопеременной функцией, оно визуализируется либо на фоне положительной постоянной составляющей либо в виде распределения модуля производной. Преобразование осуществляется с помощью следующей маски
1 |
2 |
1 |
||
|
2 |
15 2 |
|
|
|
. |
|||
|
1 |
2 |
1 |
|
|
|
|
|
|
К классу линейных преобразований также относятся восемь процедур оценивания пространственных градиентов вдоль различных направлений (условно названы: «север», «северо-восток», «восток» и т.д.). Например, маска «север» имеет следующие значения:
|
1 |
1 |
1 |
|
|
1 |
2 |
1 |
|
|
. |
|||
|
1 |
1 |
|
|
|
1 |
|||
Как и в случае с преобразованием Собела, они могут наблюдаться на фоне постоянной составляющей либо как распределения модулей. Градиентные преобразования часто включают в программное обеспечение систем обработки изображений для получения чисто зрительных эффектов.
35
Преобразование Лапласа реализует дискретный вариант вычисления второй производной двумерного поля. Оно не является, строго говоря, линейным, хотя и использует при вычислениях линейную свертку с матрицей постоянных коэффициентов. Преобразование Лапласа приводит к увеличению контраста точек максимума второй производной, которые согласно психофизиологическим исследованиям, существенно задействованы в механизмах восприятия человеком зрительных образов.
Маска фильтра конструируется следующим образом:
|
|
|
|
a |
||
|
|
|
|
|
|
|
|
|
4 |
|
|||
|
4 |
|
a |
|||
h |
1 |
|||||
|
|
|
|
|
|
|
(a 1) |
|
4 |
|
|||
|
|
|
||||
|
|
|
|
a |
|
|
|
|
|
4 |
|
||
|
|
|
|
|||
1 a |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
4 |
|
|||
1 |
1 |
a |
|
||||
|
|
|
|
|
|
, |
|
|
|
4 |
|
||||
1 a |
|
|
|
|
|
||
|
|
|
a |
|
|
|
|
4 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|||
где а – параметр в диапазоне [0,1], задаваемый пользователем.
Данный класс преобразований фактически является одним из возможных вариантов численной аппроксимации процедуры двумерного дифференцирования. Будучи знакопеременной функцией, результат преобразования визуализируется либо на фоне положительной постоянной составляющей, либо в виде распределения модуля производной. Таким образом, для подчеркивания границ на изображении применяются маски со знакопеременными коэффициентами.
3.3. Пространственная нелинейная фильтрация изображений
Все линейные алгоритмы фильтрации приводят к сглаживанию резких перепадов яркости изображений, прошедших обработку. Этот недостаток, особенно существенный, если потребителем информации является человек, принципиально не может быть исключен в рамках линейной обработки. Дело в том, что линейные процедуры являются хорошими при гауссовском распределении сигналов, помех и наблюдаемых данных. Реальные изображения, строго говоря, не подчиняются данному распределению вероятностей. Причем, одна из основных причин этого состоит в наличии у изображений разнообразных границ, перепадов яркости, переходов от одной текстуры к другой и т. п. Поддаваясь локальному гауссовскому описанию в пределах ограниченных участков, многие реальные изображения в этой связи плохо представляются как глобально гауссовские объекты. Именно это и служит причиной плохой передачи границ при линейной фильтрации.
Гауссовскому характеру помех обычно отвечают шумовые помехи на изображениях, поэтому при их подавлении линейные алгоритмы имеют высокие показатели. Однако, часто приходится иметь дело с изображениями, искаженными помехами других типов. Одной из них является импульсная помеха. При ее воздействии на изображении наблюдаются белые или (и) черные точки, хаотически разбросанные по кадру. Применение линейной фильтрации в этом случае неэффективно – каждый из входных импульсов ( по
36

сути – дельта-функция) дает отклик в виде импульсной характеристики фильтра, а их совокупность способствует распространению помехи на всю площадь кадра.
3.3.1. Медианная фильтрация. Удачным решением перечисленных проблем является применение медианной фильтрации, предложенной Дж. Тьюки в 1971 г. для анализа экономических процессов. Отметим, что медианная фильтрация представляет собой эвристический метод обработки, ее алгоритм не является математическим решением строго сформулированной задачи. Поэтому исследователями уделяется большое внимание анализу эффективности обработки изображений на ее основе и сопоставлению с другими методами.
При применении медианного фильтра (МФ) происходит последовательная обработка каждой точки кадра, в результате чего образуется последовательность оценок. В идейном отношении обработка в различных точках независима (этим МФ похож на масочный фильтр), но в целях ее ускорения целесообразно алгоритмически на каждом шаге использовать ранее выполненные вычисления.
При медианной фильтрации используется двумерное окно (апертура фильтра), обычно имеющее центральную симметрию, при этом его центр располагается в текущей точке фильтрации. На рис. 3.4. показаны два примера наиболее часто применяемых вариантов окон в виде креста и в виде квадрата. Размеры апертуры принадлежат к числу параметров, оптимизируемых в процессе анализа эффективности алгоритма. Отсчеты изображения, оказавшиеся в пределах окна, образуют рабочую выборку текущего шага.
а) |
б) |
Рис. 3.4. Примеры окон при медианной фильтрации
Двумерный характер окна позволяет выполнять, по существу, двумерную фильтрацию, поскольку для образования оценки привлекаются данные как из текущих строки и столбца, так и из соседних. Обозначим рабочую выборку в виде одномерного массива Y {y1, y2 ,...,yn}; число его элементов равняется
размеру окна, а их расположение произвольно. Обычно применяют окна с нечетным числом точек n (это автоматически обеспечивается при центральной симметрии апертуры и при вхождении самой центральной точки в ее состав).
Если упорядочить последовательность {yi , i 1, n} по возрастанию, то ее
37
медианой будет тот элемент выборки, который занимает центральное положение в этой упорядоченной последовательности. Полученное таким образом число и является продуктом фильтрации для текущей точки кадра. Понятно, что результат такой обработки в самом деле не зависит от того, в какой последовательности представлены элементы изображения в рабочей выборке Y . Введем формальное обозначение описанной процедуры в виде:
|
|
x med ( y , y |
2 |
,...,y |
n |
) . |
|
|
(3.4) |
|
|
|
1 |
|
|
|
|
|
|
||
Рассмотрим |
пример. |
Предположим, |
|
что |
выборка |
имеет |
вид: |
|||
Y {136,110,99,45,250,55,158,104,75}, а |
элемент 250, расположенный |
в ее |
||||||||
центре, соответствует текущей точке фильтрации |
(i1,i2 ) (рис. |
3.4). Большое |
||||||||
значение яркости в этой точке кадра может быть результатом воздействия импульсной (точечной) помехи. Упорядоченная по возрастанию выборка имеет при этом вид {45,55,75,99,104,110,136,158,250}, следовательно, в
соответствии с процедурой (3.48), получаем x med ( y1, y2 ,...,y9 ) 104 . Видим,
что влияние «соседей» на результат фильтрации в текущей точке привело к «игнорированию» импульсного выброса яркости, что следует рассматривать как эффект фильтрации. Если импульсная помеха не является точечной, а покрывает некоторую локальную область, то она также может быть подавлена. Это произойдет, если размер этой локальной области будет меньше, чем половина размера апертуры МФ. Поэтому для подавления импульсных помех, поражающих локальные участки изображения, следует увеличивать размеры апертуры МФ.
Из (3.4) следует, что действие МФ состоит в «игнорировании» экстремальных значений входной выборки – как положительных, так и отрицательных выбросов. Такой принцип подавления помехи может быть применен и для ослабления шума на изображении. Однако исследование подавления шума при помощи медианной фильтрации показывает, что ее эффективность при решении этой задачи ниже, чем у линейной фильтрации .
Результаты экспериментов, иллюстрирующие работу МФ, приведены на рис. 3.5. В экспериментах применялся МФ, имеющий квадратную апертуру со стороной равной 3. В левом ряду представлены изображения, искаженные помехой, в правом – результаты их медианной фильтрации. На рис. 3.5,а и рис. 3.5,в показано исходное изображение, искаженное импульсной помехой. При ее наложении использовался датчик случайных чисел с равномерным на интервале [0, 1] законом распределения, вырабатывающий во всех точках кадра независимые случайные числа. Интенсивность помехи задавалась вероятностью p ее возникновения в каждой точке. Если для случайного числа
ni1 ,i2 , сформированного в точке (i1 ,i2 ) , выполнялось условие ni1 ,i2 p , то яркость изображения xi1 ,i2 в этой точке замещалась числом 255,
соответствующим максимальной яркости (уровню белого). На рис. 3.5.а действием импульсной помехи искажено 5 % ( p =0.05), а на рис. 3.5,в – 10 %
элементов изображения. Результаты обработки говорят о практически полном
38

подавлении помехи в первом случае и о ее значительном ослаблении во втором. При увеличении уровня шума медианный фильтр
а) |
б) |
в) |
г) |
д) |
е) |
Рис. 3.5. Примеры медианной фильтрации
Рис. 3.5,д показывает изображение, искаженное независимым
39
гауссовским шумом при отношении сигнал/шум q2 5дБ, а рис. 3.5,е -
результат его фильтрации медианным фильтром. Условия данного эксперимента позволяют сравнивать его результаты с результатами рассмотренной выше линейной фильтрации. Медианный фильтр имеет наименьшую из всех линейных фильтров эффективность.Тем не менее, это число свидетельствует о том, что и при его помощи удается значительно снизить уровень шума на изображении.
Медианная фильтрация в меньшей степени сглаживает границы изображения, чем любая линейная фильтрация. Механизм этого явления очень прост и заключается в следующем. Предположим, что апертура фильтра находится вблизи границы, разделяющей светлый и темный участки изображения, при этом ее центр располагается в области темного участка. Тогда, вероятнее всего, рабочая выборка будет содержать большее количество элементов с малыми значениями яркости, и, следовательно, медиана будет находиться среди тех элементов рабочей выборки, которые соответствуют этой области изображения. Ситуация меняется на противоположную, если центр апертуры смещен в область более высокой яркости. Но это и означает наличие чувствительности у МФ к перепадам яркости. Медианная фильтрация изображений используется для подавления импульсных шумов.
3.3.2. Другие алгоритмы нелинейной фильтрации. Для решения задачи очистки изображений от шумов с использованием фильтрации непосредственно в пространственной области в литературе предлагается большое число эвристических нелинейных алгоритмов. Рассмотрим некоторые из них. Один из наиболее простых и вместе с тем достаточно эффективных алгоритмов – комбинированный фильтр. Расчетная формула для выходного изображения g i, j :
|
|
|
|
g i, j f i, j 1 |
|
i, j , |
(3.5) |
|||
|
|
|
|
f |
||||||
где |
1 |
D i, j |
|
– коэффициент регуляризации; |
|
i, j , |
D i, j – среднее и |
|||
|
f |
|||||||||
D |
||||||||||
|
|
|
|
|
|
|
|
|||
дисперсия, оцениваемые для каждой точки в примыкающем к ней окне размера2L 1 2L 1 ; D – оценка дисперсии, рассчитанная по всему изображению.
Из структуры параметра регуляризации видно, что фильтр обеспечивает тем большее сглаживание, чем большие вариации претерпевает сигнал в текущем окне. Фактически фильтр (3.5) определяет свертку с окном, в котором коэффициенты не являются постоянными, а определенным образом подстраиваются под текущие статистики исследуемого поля. Перед выполнением процедуры пользователь может уточнить значение единственного настраиваемого параметра – полуширины скользящего окна L .
Процедура статистического дифференцирования предназначена для обнаружения перепадов яркости на анализируемом изображении. Расчетная
формула для выполнения преобразования: |
|
g i, j Af i, j i, j , |
(3.6) |
где i, j – среднеквадратичное отклонение в скользящем окне |
размера |
|
40 |