

12.8. Рабочие характеристики асинхронного двигателя
Зависимости частоты вращения ротора n, тока статора I1, момента на валу М, к. п. д. η и cos φ1 от мощности Р2 при U1 = const и f1 = const называются рабочими характеристиками асинхронного двигателя. Типичный вид рабочих характеристик (в относительных единицах) показан на рис. 12.15.
Рабочие характеристики для двигателей небольшой мощности можно построить путем непосредственного измерения частоты вращения n, тока I1, момента на валу М и мощности Р2 при различных нагрузках двигателя, для чего используется электромагнитный (или какой-либо другой) тормоз, позволяющий изменять тормозящий момент. Однако такой метод построения рабочих характеристик не всегда возможен, так как не всегда позволяет получить достаточно точные результаты, а в ряде случаев вообще трудноосуществим, особенно для двигателей большой мощности. В этом случае рабочие характеристики получают косвенным (например, используя круговые диаграммы) или расчетным путем (если известны параметры машины, полученные из ее расчета или из опытов холостого хода и короткого замыкания).
Зависимость частоты вращения двигателя от нагрузки n =f (Р2) по виду является жесткой, так как частота вращения двигателя n = n0(l - s) при изменении нагрузки меняется незначительно. Жесткость характеристики обусловлена небольшими значениями скольжения двигателя при номинальной нагрузке (sном = 0,01 - 0,06), выбираемыми при проектировании двигателя из соображения экономичности, ибо с уменьшением скольжения снижаются потери мощности в роторе ΔРэ2.
Вращающий момент
на валу двигателя М связан с полезной
мощностью Р2,
развиваемой двигателем на валу,
соотношением М = Р2/ω.
Если бы угловая скор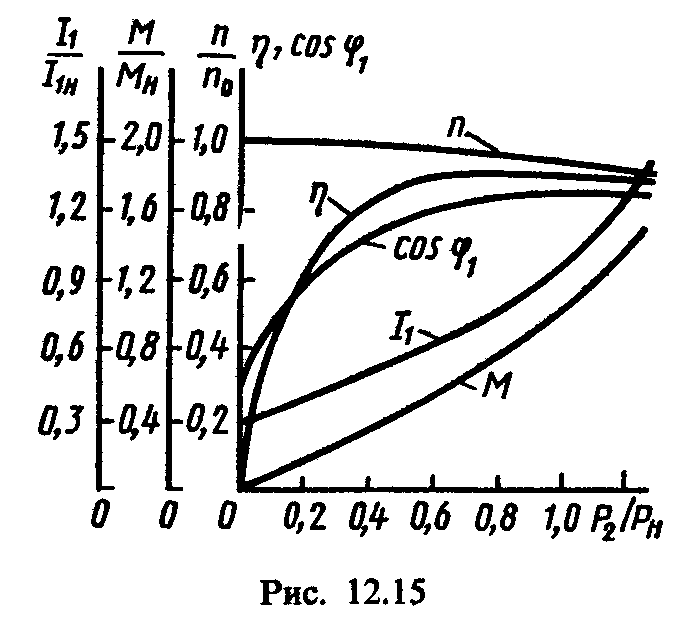 ость
двигателя ω была постоянной, то зависимость
ость
двигателя ω была постоянной, то зависимость![]() была бы линейной. Однако частота вращения
двигателя с увеличением нагрузки немного
уменьшается, поэтому эта зависимость
немного отклоняется вверх.
была бы линейной. Однако частота вращения
двигателя с увеличением нагрузки немного
уменьшается, поэтому эта зависимость
немного отклоняется вверх.
Ток статора I1 согласно (12.27), равен сумме приведенного тока ротора и тока холостого хода. Зависимость тока статора I1 = f(P2) обусловлена соотношением между намагничивающим (реактивным) током и активным током двигателя при изменении нагрузки. Реактивная составляющая тока статора определяется в основном током холостого хода, последний же составляет 20—40% от номинального тока и незначительно меняется с изменением нагрузки. Активная составляющая тока статора пропорциональна полезной мощности двигателя. Поэтому зависимость I1 = f(P2) в диапазоне рабочих нагрузок достаточно близка к линейной.
На рис. 12.15 показана типичная зависимость соsφ1 от нагрузки двигателя, при этом наибольшее его значение (0,8 — 0,9) получается при нагрузках, близких к номинальной. На холостом ходу асинхронный двигатель потребляет почти чисто реактивный ток, идущий на создание основного магнитного потока, поэтому при холостом ходе угол сдвига фаз φ1 близок к π/2 и cosφ1 соответственно очень мал (обычно не превышает 0,2). При увеличении нагрузки (особенно до значений, близких к номинальным) возрастает активная составляющая тока, реактивная составляющая тока при этом изменяется мало, так как основной магнитный поток двигателя практически постоянен. Следовательно, при увеличении нагрузки двигателя угол φ1 уменьшается, а соsφ1 соответственно увеличивается. При нагрузке выше номинальной значительно увеличиваются магнитные потоки рассеяния, вследствие чего реактивная составляющая тока возрастает, тем самым вызывая увеличение угла φ1 и уменьшение cosφ1.
Так как асинхронные двигатели наиболее распространены и являются основными потребителями электроэнергии в промышленности, то при недогрузке они могут сильно снижать cosφ энергетических систем, поэтому необходимо, чтобы двигатель при работе был достаточно нагружен.
В целом асинхронные двигатели, особенно малой мощности, имеют сравнительно низкий cosφ1, что является одним из их недостатков.
Магнитный поток асинхронного двигателя пропорционален напряжению, приложенному к обмотке статора. Намагничивающий ток, возбуждающий в двигателе магнитный поток заданного значения, будет тем меньше, чем меньше магнитное сопротивление пути прохождения потока. Наибольшую часть этого магнитного сопротивления в двигателях составляет воздушный зазор между статором и ротором. Следовательно, чем меньше воздушный зазор у двигателя, тем меньше магнитное сопротивление прохождению потока и тем меньший требуется намагничивающий ток для создания заданного потока. Таким образом, двигатели с наименьшим воздушным зазором имеют меньший намагничивающий ток и наибольший cosφ. С ростом номинальной мощности двигателей размеры их воздушных зазоров растут медленнее, чем мощность, поэтому с увеличением мощности двигателей повышается их cosφ.
Зависимость к. п.
д. асинхронного двигателя от полезной
мощности Р2,
представленная на рис. 12.15, имеет такой
же характер, как и для трансформаторов
или большинства электрических машин.
Мощность Р2,
представляя собой механическую мощность,
отдаваемую двигателем, отличается
от подводимой к нему мощности P1
на значение потерь Δр, которые
подразделяются на постоянные Δрпост,
не зависящие от нагрузки двигателя,
и переменные Δрпер,
которые зависят от нагрузки:
![]()
К постоянным
потерям
относятся потери в стали на гистерезис
и вихревые токи Δрс
и механические потери Δрт,
которые при изменении нагрузки
остаются постоянными, такими же, как
при холостом ходе:
![]()
Переменными
потерями
являются электрические потери Δрэ
в обмотках статора и ротора
![]() электрические
потери в щеточном контакте Δрщ.э
(в двигателях с фазным ротором), которые
изменяются пропорционально току, и
добавочные потери ΔРдоб,
изменяющиеся пропорционально квадрату
тока нагрузки. Следует отметить, что
добавочные потери возникают вследствие
изменения относительного положения
зубцов ротора и статора при вращении
ротора, что приводит к изменению
магнитного сопротивления и пульсации
магнитного потока. Для снижения этих
потерь может служить, например, скос
пазов ротора относительно направления
пазов статора. Итак,
электрические
потери в щеточном контакте Δрщ.э
(в двигателях с фазным ротором), которые
изменяются пропорционально току, и
добавочные потери ΔРдоб,
изменяющиеся пропорционально квадрату
тока нагрузки. Следует отметить, что
добавочные потери возникают вследствие
изменения относительного положения
зубцов ротора и статора при вращении
ротора, что приводит к изменению
магнитного сопротивления и пульсации
магнитного потока. Для снижения этих
потерь может служить, например, скос
пазов ротора относительно направления
пазов статора. Итак,
![]() (12.42)
(12.42)
К. п. д. по мере возрастания нагрузки изменяется от нуля при холостом ходе (Р2 = 0) до максимального значения, когда переменные потери равны постоянным. При дальнейшем увеличении нагрузки рост к. п. д. прекращается и его значение начинает уменьшаться.
Максимальный к. п. д. в двигателях средней и большой мощностей имеет место примерно .при нагрузках 60—85% от номинальной, что учитывают при выборе двигателя для привода исполнительного механизма. С увеличением номинальной мощности двигателей их к. п. д. возрастает, так как при этом относительные суммарные потери уменьшаются.