Курсовые / DENKYRS
.DOC
Московский Институт Электронной Техники
Кафедра САУиК
Курсовая работа по ТАУ
Вариант 12
Выполнил студент гр.АиЭМ-32
Мамичев Д.М.
Проверил: Таран В.А.
Москва 2001
План:
1.Исходные данные;
2.Структурная схема объекта управления;
3.Передаточная функция объекта управления;
4.Уравнения состояния непрерывного объекта;
5.Уравнения состояния дискретной модели объекта;
6.Параметры цифрового регулятора состояния,обеспечивающего
торможение за минимальное число тактов квантования;
7.Параметры оптимального по быстродействию наблюдателя состояния и его структурная схема;
8.Уравнения состояния (в развернутом виде) замкнутой цифровой системы и её структурная схема;
9. Рассчет и построение графиков сигналов в цифровой системе с наблюдателем и регулятором состояния;
10.Список использованной литературы.
1.Исходные данные.
Тип двигателя СЛ-369А
Мощность РН= 55 Вт
Напряжение UН=110 В
Ток IН=0.1 A
Скорость вращения n=3600 об/мин
Вращающий момент M=15 Н*см
Момент инерции Jx=0.7 кг*см2
Сопротивление R=15.2 Ом
Индуктивность L=90 мГн
Объект управления – электрический привод с двигателем
постоянного тока, описываемый уравнениями:
уравнение электрической цепи двигателя
u=E+i*R+L*di/dt (1) ,
уравнение моментов
M=J*dw/dt (2) ,
уравнение редуктора
y=Kp*f (3) ,
где u – напряжение на якоре двигателя [B] ,
i – ток якоря [А] ,
E=K1*w – э.д.с. вращения [B] ,
M=K2*I – момент,развиваемый двигателем [Hм] ,
f - угол поворота вала двигателя [рад] ,
y – угол поворота вала редуктора(выход) [рад] ,
w=df/dt – угловая скорость [1/c] ,
Кр=1 – коэффициент передачи редуктора ,
R,L -сопротивление и индуктивность якоря [Ом],[Гн] ,
К1,К2 – конструктивные параметры двигателя [Bc/рад],[Hм/A] ,
K1=(Uн-Iн*R)/w
K2=M/Iн
J=Jя*2 , где Jя – паспортный момент инерции.
3.Передаточная функция объекта управления.
Продифференцируем уравнение (3):
dy/dt=Kp*df/dt=Kp*w (т.к. w=df/dt) (4)
Из уравнения (2) , зная что M=K2*i:
K2*i=J*dw/dt , откуда i=(J/K2)*dw/dt (5)
Подставляя (3) и (4) в (1) имеем:
![]()
Применяем преобразование Лапласа:
![]()
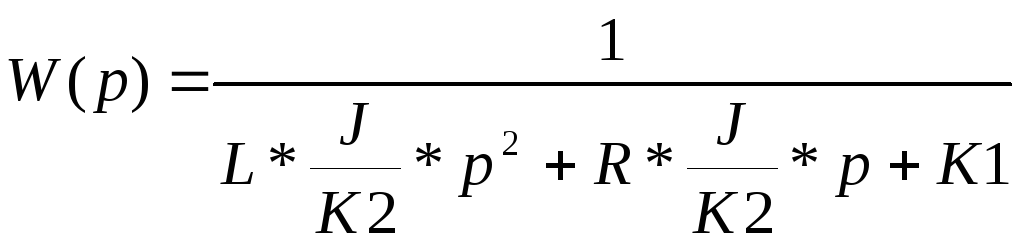 - передаточная
функция
- передаточная
функция
![]() -
переходная характеристика
-
переходная характеристика
![]() -
переходная ф-ция
-
переходная ф-ция
![]() ,
,
![]() ,
,
![]()
Подставляя исходные данные имеем:
Подставляем исходные данные :
![]()
![]()
Переходная характеристика объекта управления
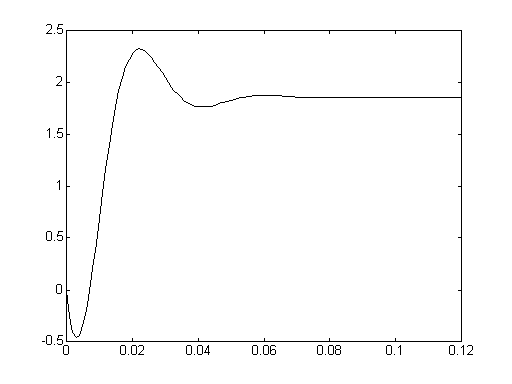
Время переходного процесса и период квантования находим с помощью файла graftau.m в MATLAB :
graftay.m:
t=0:0.001:0.12;
h=1.8602*(1-(cos(164.6977*t)+1.53826*sin(164.6977*t)).*
*exp( 84.4444*t));
axis([0 0.5 0 3.5]);
plot(t,h);
hu=1.8602;
for i=1:length(h)
if (abs(h(i)-hu))>(0.025*hu)
tp=t(i);
end;
end;
T=0.1*tp;
![]() - время переходного процесса
- время переходного процесса
![]() -
период квантования управляющей ЦВМ
-
период квантования управляющей ЦВМ
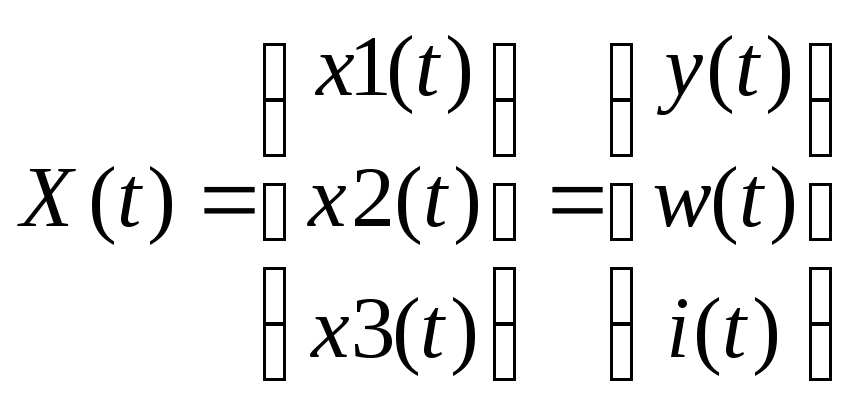
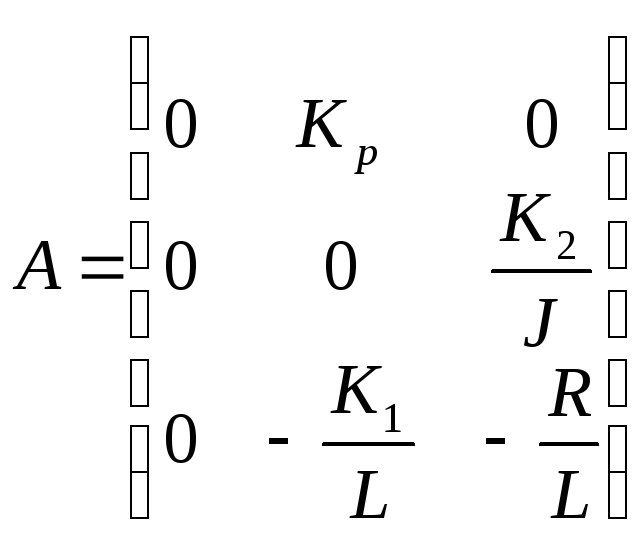
4.Уравнения состояния непрерывного объекта.
X(t)=A*X(t)+B*uя(t)
y(t)=C*X(t)
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
 ;
;
![]() .
.
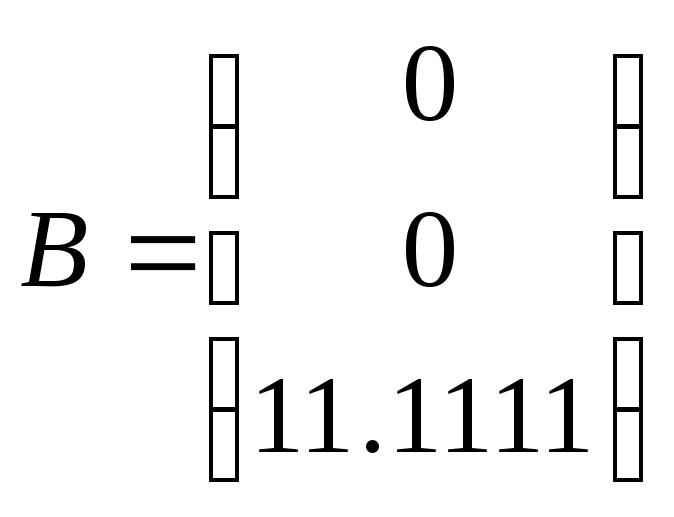
Подставляя исходные данные:
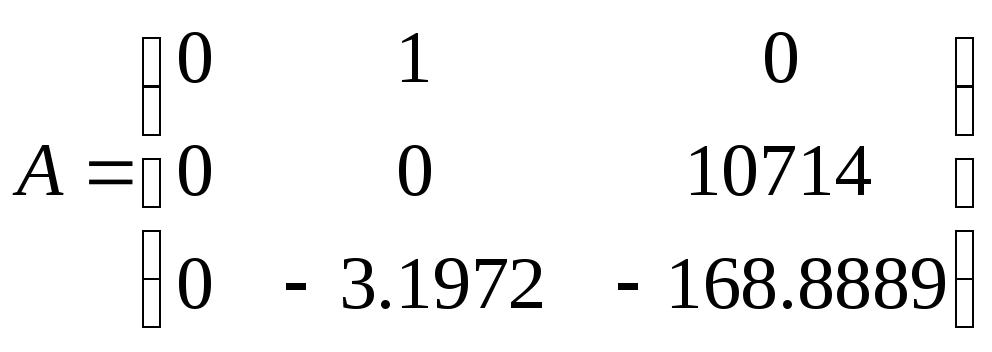 ;
;
 ;
;
![]() .
.
Определим является ли система управляемой и наблюдаемой.
Для этого найдем матрицы управляемости (Su) и наблюдаемости (Sn):
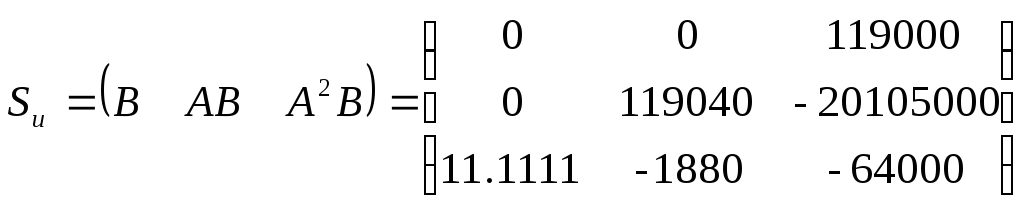 ;
rang
Su=3
;
rang
Su=3
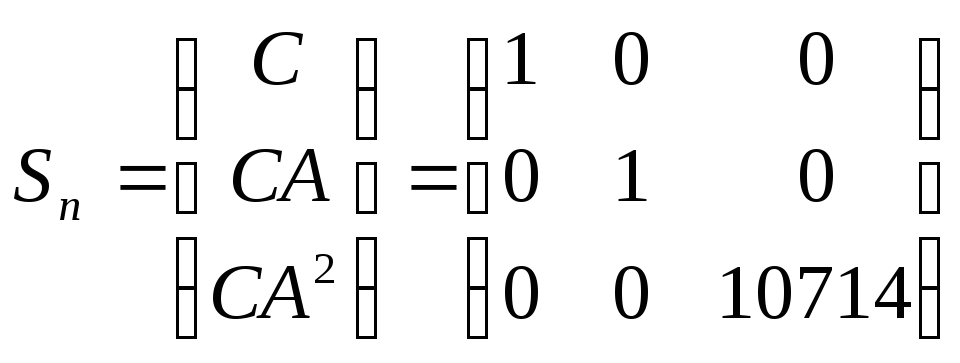 ;
rang Sn=3
;
rang Sn=3
Система является как полностью наблюдаемой,так и полностью управляемой.
5.Уравнения состояния дискретной модели объекта.
X(k+1)=Ad*X(k)+Bd*uя(k)![]()
y(k)=C*X(k)
![]() ;
;
![]() ;
;
![]()
Подставляя исходные данные, имеем:
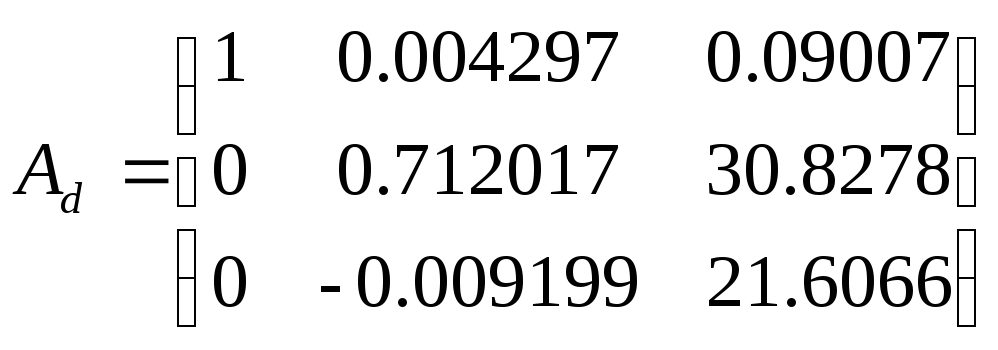 ;
;
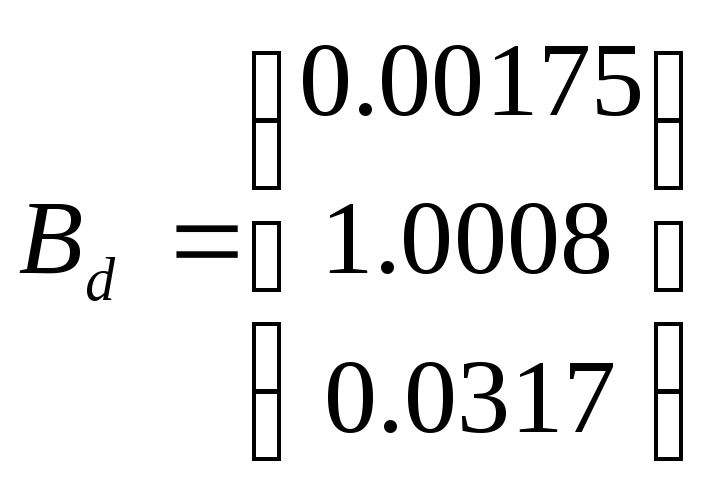 ;
;
![]() .
.
6. Параметры цифрового регулятора состояния, обеспечивающего торможение за минимальное
число тактов квантования.
![]()
![]() -
матрица обратной связи по вектору
состояния наблюдателя X'.
-
матрица обратной связи по вектору
состояния наблюдателя X'.
Для того,чтобы переходный прцесс заканчивался за минимальное число тактов квантования,необходимо, чтобы
![]()
![]() ,
где Sco
– матрица управляемости дискретной
модели объекта
,
где Sco
– матрица управляемости дискретной
модели объекта
![]() .
.
Подставляя исходные данные, имеем:
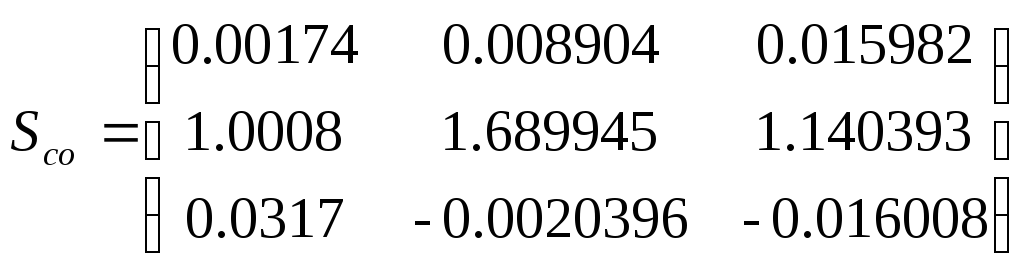 ;
;
![]()
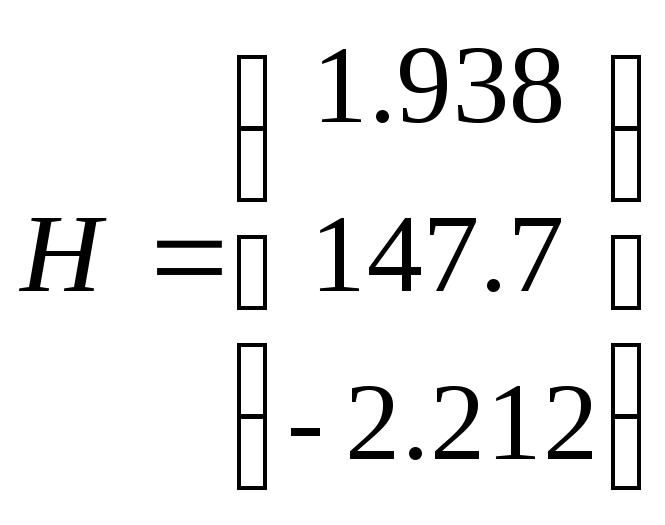
7. Параметры оптимального по быстродействию наблюдателя состояния и его структурная схема.
Запишем уравнения состояния наблюдателя
![]() ;
;
![]() ;
;
 ;
;
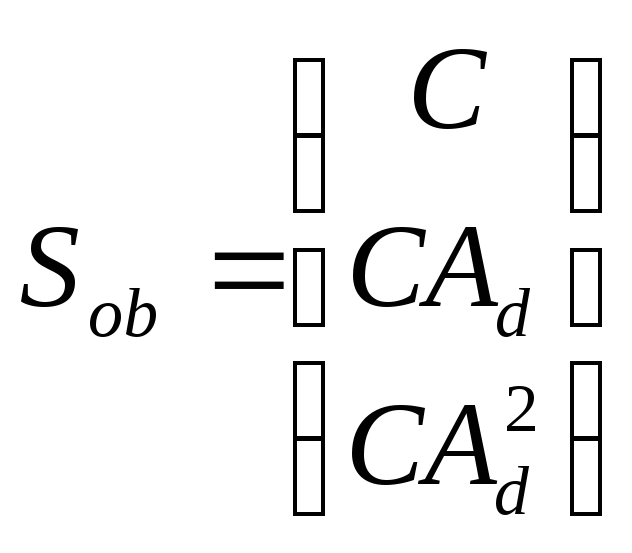
 ,
где Sob
– матрица наблюдаемости дискретной
модели объекта
,
где Sob
– матрица наблюдаемости дискретной
модели объекта
 ;
;
Подставляя исходные данные, имеем:
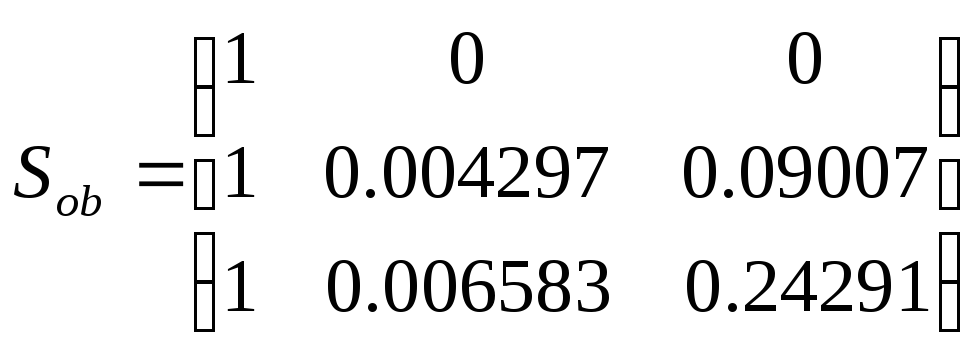 ;
;
 ;
;
Структурная схема наблюдателя:

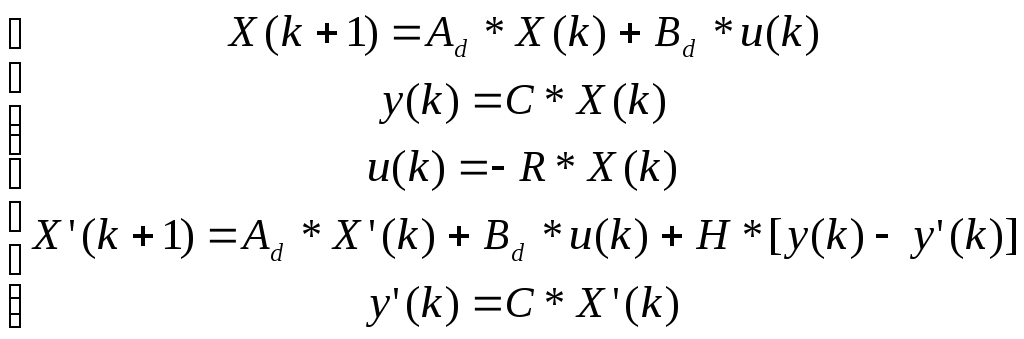
8. Уравнения состояния (в развернутом виде) замкнутой цифровой системы и её структурная схема.
![]()


Структурная схема замкнутой цифровой системы:
А Z-1 B C H A Z-1 C B R































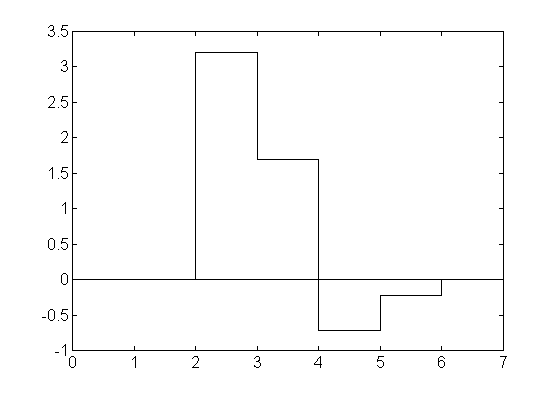
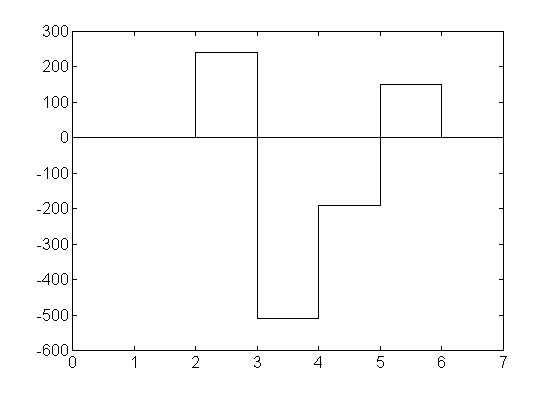
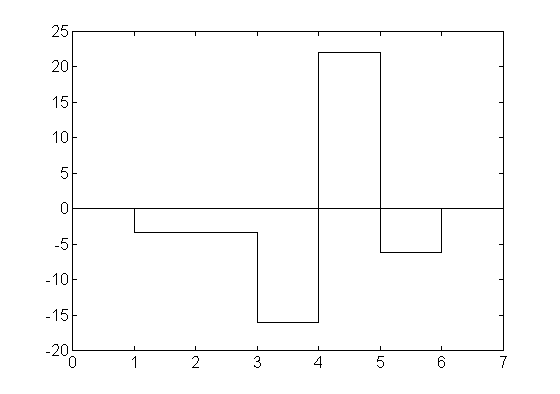
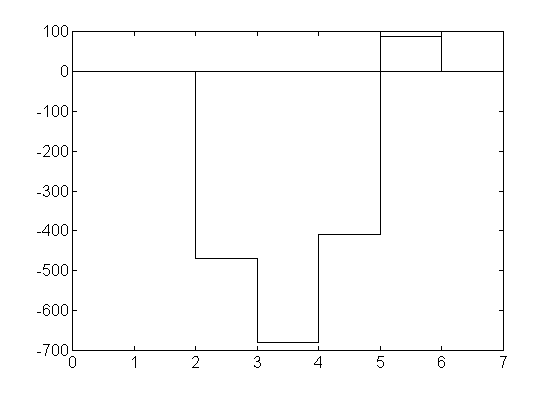
9. Рассчет и построение графиков сигналов в цифровой системе с наблюдателем и регулятором состояния.


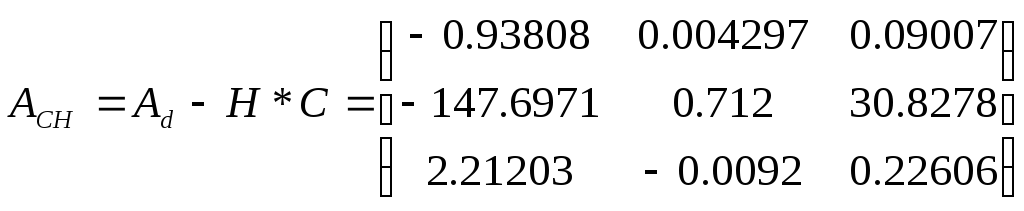
Матрица замкнутой системы с регулятором состояния :

Собственная матрица наблюдателя :
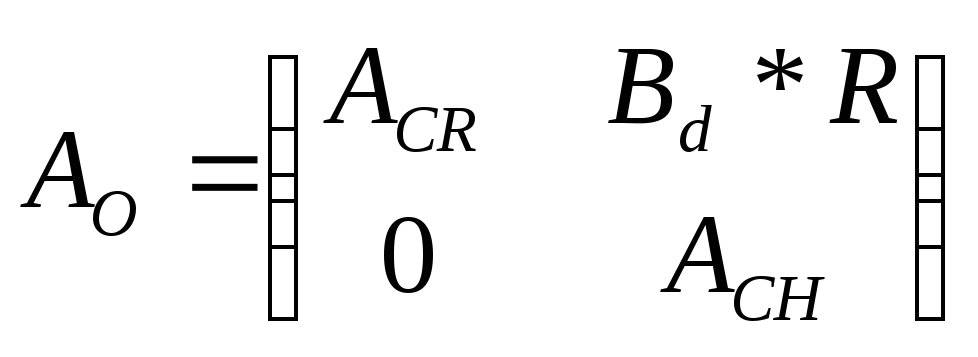
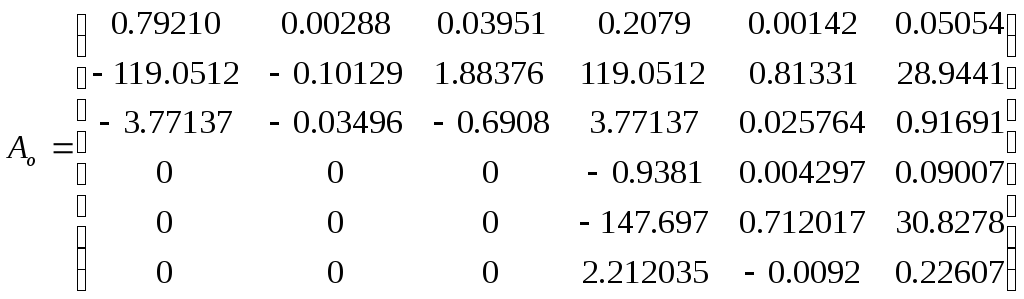
Матрица замкнутой системы с регулятором состояния и наблюдателем.
![]()
![]()
![]()
![]()
Начальные
условия:![]()

Шаг |
X1 |
X’1 |
X2 |
X’2 |
X3 |
X’3 |
u |
|
0 |
0 |
0 |
380 |
0 |
0.1 |
0 |
0 |
|
1 |
1.6 |
-1.8 E-12 |
270
|
0 |
-3.4 |
3.6 E-12 |
1.1 E-10 |
|
2 |
2.5 |
3.2 |
87 |
240 |
-3.3 |
-3.6 |
-470 |
|
3 |
1.7 |
1.7 |
-510
|
-510
|
-16 |
-16 |
680
|
|
4 |
-0.72 |
-0.72 |
-190 |
-190 |
22 |
22 |
-410 |
|
5 |
-0.22 |
-0.22 |
150
|
150
|
-62 |
-62 |
87
|
|
6 |
-7.4 E-14 |
- 7.4 E-14 |
1.9 E-10 |
-1.9 E-10 |
-2.7 E-11 |
-2.7 E-11 |
6.4 E-10 |