

Kurs_Rab
.pdf30
Ed = Edo cosα; Edo = (m /π )sin(π / m)U л.м.
где m – число фаз эквивалентного выпрямителя; U л.м. – максимальное значение линейного напряжения.
Регулировочная характеристика преобразователя зависит от системы импульсно-фазового управления (СИФУ). При этом чаще всего используются СИФУ, работающие по вертикальному принципу, основанному на сравнение управляющего сигнала U упр с опорным Uоп . Если Uоп является ча-
стью синусоиды питающего напряжения, то
α = arccos(U упр /U оп. макс ) ,
причем в точке естественного отпирания Uоп = Uоп. макс .
Если Uоп = Uоп. макс[1 − (2 /π )ωot] уменьшается по линейному закону,
то
α = (π / 2)(1 − U упр /U оп .макс .
В первом случае
Ed = EdoU упр /Uоп. макс = kпU упр ,
а во втором
Ed = Edo sin[πU упр / 2Uоп. макс] .
Таким образом, для синусоидального опорного сигнала коэффициент усиления ТП постоянен, а для линейного опорного напряжения
kп = (π / 2)sinα .
Если сигнал управления подвергнуть преобразованию
U y1 = arccos(U упр /Uоп. макс) ,
то можно получить постоянство коэффициента передачи преобразователя при линейном опорном сигнале.

31
В промышленных приводах часто используется СИФУ со следующей зависимостью угла управления ϑ от управляющего напряжения
ϑ = |
π |
− α = |
π |
U |
упр |
, (−π / 2 |
≤ ϑ ≤ +π / 2; |
− U |
|
≤ U |
|
≤ +U |
|
) , |
|
|
|
|
П |
упр |
П |
||||||||
|
2 |
|
2 U П |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
где UП – половина полного изменения пилообразного опорного напряжения; α угол управления, отсчитываемый от точки естественной коммутации.
Для СИФУ с арксинусной характеристикой ϑ = arcsin π U упр коэффи- 2 U П
циент усиления управляемого выпрямителя постоянен [19].
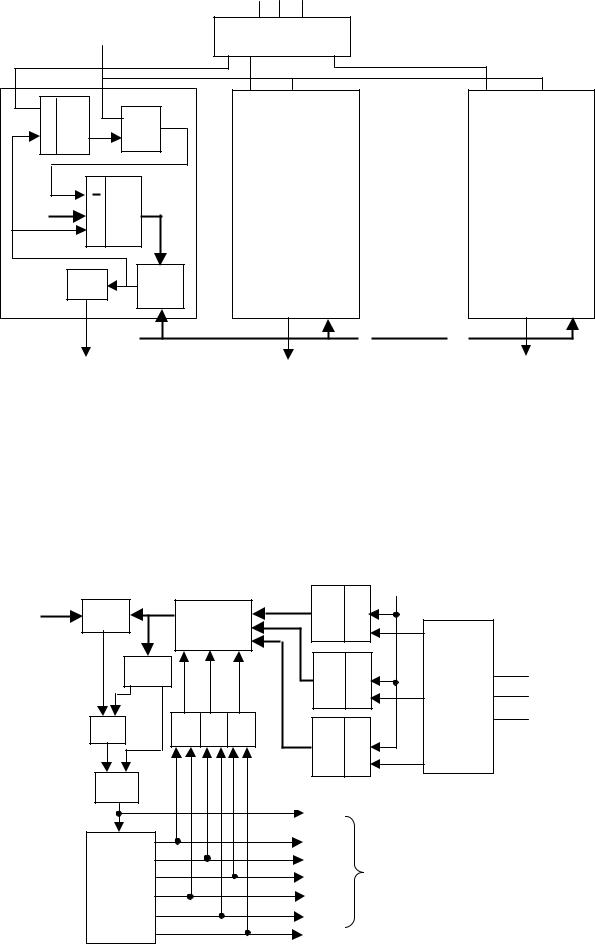
3.6.2.Цифровые СИФУ. Рассмотрим синхронные СИФУ [6], выполненные по вертикальному принципу. Цифровые СИФУ такого рода могут быть многоканальными и одноканальными. На рис. 24 показана структурная схема многоканальной СИФУ, состоящей из шести одинаковых каналов, каждый из которых формирует отпирающий импульс для одного плеча моста. Блок синхронизации с сетью БСС формирует импульсы в моменты времени, соответствующие точкам естественной коммутации. Каждый импульс устанавливает R-S триггер Т своего канала в единичное состояние, разрешая прохождение тактовых импульсов fT на вычитающий вход счетчика СТ. Пред-
варительно в счетчик записан код N м так, что содержимое счетчика умень-
шается. Схема сравнения кодов ССК сравнивает код счетчика и код управления Nα , в момент их равенства формируется импульс, который через фор-
мирователь Ф подается на соответствующий тиристор. Одновременно триггер Т сбрасывается в исходное состояние и в счетчик СТ записывается код N м, соответствующий углу управления α = 0 . Теоретический диапазон из-
менения α составляет 1800, задаваясь допустимой дискретностью 0,25 10 можно определить разрядность счетчика. Отметим, что если выходной сигнал регулятора подвергается arccos преобразованию, то для сохранения линейной регулировочной характеристики СИФУ тактовые импульсы должны подаваться на суммирующий вход счетчика СТ, а в момент формирования управляющего импульса он должен сбрасываться в нуль. За счет усложнения
логики можно получить схему, в которой углу α = 90о соответствует
N упр = 0 .
|
|
|
32 |
|
|
fT |
|
БСС |
|
|
|
+А +В +С -А -В -С |
|
|
S |
T |
& |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
CT |
|
|
N м |
D |
|
|
|
|
C |
|
|
|
Канал |
Ф |
ССК |
Канал |
Канал |
|
||||
+А |
|
|
+В |
-С |
|
|
Nα |
|
|
|
+А |
|
+B |
-C |
|
|
|
Рис. 24. Структурная схема цифровой многоканальной СИФУ
Полный диапазон изменения α составляет 0 1800, однако реальный диапа-
зон |
меньше |
и |
равен |
α |
макс |
− α |
мин |
, |
где |
α |
мин |
= (5 − 10)o |
, а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
α |
макс |
= (165 − 170)o . Так как диапазон изменения угла α < 180o , то можно |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
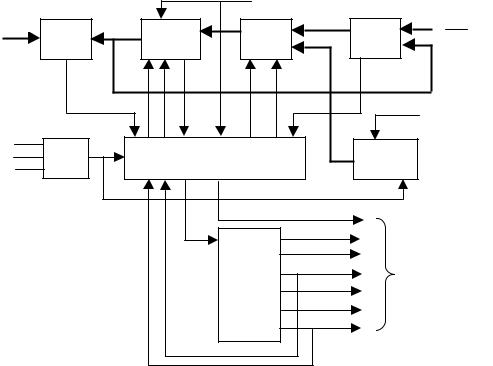
один и тот же счетчик использовать для управления тиристорами +А и – А. Схема такого СИФУ изображена на рис. 25. Каждый из трех счетчиков сбрасывается импульсами ±А, ±В, ±С дважды за период.
Nα |
|
|
|
|
CT1 |
БСС |
|
ССК |
|
СЕ |
|
+ |
|
||
|
|
|
|
|
|||
|
|
|
|
|
R |
+А,-А |
|
|
|
ДШ |
|
|
CT2 |
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
~ |
|
|
|
Nмакс |
|
|
R |
+В,-В |
|
|
|
1 |
1 |
|
|
|
|
|
1 |
1 |
CT3 |
+С,-С |
|
||
|
|
|
|
|
|||
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
Nмин |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
Отпирающий импульс |
|
|
|
RG |
1 |
|
|
+А |
|
|
|
2 |
|
|
-С |
К выходным |
|
|
|
|
|
|
|
|||
|
|
3 |
|
|
+В |
формирователям |
|
|
|
4 |
|
|
-А |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
+С |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
-В |
|
|
|
|
|
|
|
|
|
|
|
Рис. 25. Цифровая многоканальная СИФУ с уменьшенным числом счетчиков
|
|
|
33 |
|
|
|
Одновременно происходит переключение канала и через селектор СЕ |
||||||
на входы ССК поступает код очередного счетчика (СТ1… |
СТ3) опорного |
|||||
сигнала. Отпирающий импульс не может быть сформирован раньше α мин и |
||||||
позже α макс . Для реализации данных условий с помощью дешифратора ДШ |
||||||
осуществляется формирование сигналов N мин и |
N макс , соответствующих |
|||||
указанным моментам времени. Распределитель импульсов управления, со- |
||||||
стоит из сдвигового регистра (кольцевого счетчика) RG и выходных усили- |
||||||
телей-формирователей. В начальном состоянии в 1-й разряд RG записана ло- |
||||||
гическая «1 . В момент равенства Nα и кода развертки на выходе схемы |
||||||
сравнения кодов ССК формируется отпирающий импульс и происходит |
||||||
сдвиг «1 в следующий разряд RG. |
|
|
|
|||
В одноканальной СИФУ (рис. 26) используются два счетчика. Блок |
||||||
синхронизации с сетью БСС выдает один импульс за период, например, в |
||||||
точке естественной коммутации для тиристора +А. В течении одного периода |
||||||
частоты схема работает следующим образом. После формирования отпи- |
||||||
рающего импульса из содержимого счетчика СТ1 вычитается код пропор- |
||||||
циональный |
2π / m . |
Формирование |
разности осуществляется с помощью |
|||
сумматора СМ, а затем полученый код перезаписывается по входам D. Таким |
||||||
образом, если код Nα постоянен, то импульсы на выходе ССК появляются |
||||||
через 2π / m . |
|
|
|
|
|
|
Nα |
|
|
fT |
|
2π |
|
ССК |
СТ1 D |
CE |
СМ - |
|||
|
m |
|||||
|
|
R C >0 |
1 2 |
Р + |
||
|
|
|
|
|
fT |
|
~ |
БСС |
Логическая схема |
СТ2 |
|
||
|
|
|
|
R |
|
|
|
|
|
Отпирающий |
|
|
|
|
|
|
импульс |
|
|
|
|
|
RG |
1 |
|
|
|
|
|
|
2 |
К формиро- |
||
|
|
|
3 |
|||
|
|
|
4 |
вателям |
||
|
|
|
5 |
|
|
|
|
|
|
6 |
|
|
|
Рис. 26. Функциональная схема цифровой одноканальной СИФУ |
||||||

34
На рис. 27 сплошная линия соответствует изменению кода СТ1 при угле задания Nα = 30o , а штрих пунктирная Nα = 90o . В первом случае
(α < 2π / m ) и при перезаписи кода в СТ1 в нем формируется отрицательный (обратный) код, тогда как БСК осуществляет сравнение прямых кодов. Для исключения ложных импульсов БСК вводится блокировка до момента прохождения счетчика СТ1 через нуль. Это осуществляется по сигналу переполнения Р сумматора, который взводит триггер логической схемы. В момент прохождения СТ1 через нуль данный триггер сбрасывается в исходное состояние. Виртуальный нуль СТ1 показан штриховой линией. Еслиα < 2π / m , то последний (6-й) отпирающий импульс сформируется раньше, чем очередной импульс БСС. В этом случае необходимо сбросить СТ1 в нуль для синхронизации с сетью. Если α > 2π / m , то импульс БСС сформируется раньше чем последний отпирающий импульс. При этом сброс СТ1 не допустим. Поэтому в момент α = 0 для +А сбрасывается СТ2, а после сформирования последнего импульса его содержимое перезаписывается через СЕ в СТ1 по цепям параллельной записи. Соответствующие переключения осуществляются логической схемой.
|
|
|
3600 |
|
|
|
|
|
|
|
|
|
|
N α ≡ 90 o |
|
|
|
|
|
|
|
Nα º 30o |
|
0 |
|
|
|
|
|
|
2π |
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
-В |
+А |
-С |
+В |
-А |
+С |
-В |
+А |
|
Рис. 27. Диаграммы формирования отпирающих импульсов |
|
|||||
Рассмотренные принципы организации СИФУ не исчерпывают всех возможных вариантов их построения. Достаточно очевидным является вариант СИФУ, в котором управляющий сигнал периодически смещают по вертикали на 2p¤m и используют один опорный сигнал с периодом 2p. Более того, последний вариант может быть использован в качестве основного при использовании широтно-импульсных модуляторов (Pulse Width Modulator – PWM) в МК с развитой архитектурой [20,21]. Данные модуляторы имеют развитую систему прерываний и допускаю работу как с внутренней, так и внешней тактовой частотой. При многоканальном исполнении один из каналов ШИМ может быть использован в качестве генератора для другого.
Другой вариант основан на представление угла отпирания в виде
α0 |
= |
2π |
k + α0' , где k = 0,1,2; α0' < 2π / m . Угол α0' записывается в счетчик |
|
|||
|
|
m |
|
таймера в моменты естественного отпирания вентилей. После чего счетчик
35
начинает вычитать импульсы тактовой частоты. При обнулении счетчика формируется отпирающий импульс на тиристор. Информация о значении k используется для выборки табличных значений номера рабочего тиристора. Если значение k такое же, как на предыдущем интервале дискретности, то очередной отпирающий импульс будет подан на следующий по порядку тиристор. Номер этого тиристора N может быть определен как номер периодического интервала преобразования S − k , причем, если S − k < 0 , то принимается N = S − k + 6 . Если значение k больше, чем на предыдущем такте работы, то этот импульс не подается. Отпирающий импульс не подается и на следующем такте, если приращение k равно 2. Если же значение k на текущем такте меньше, чем на предыдущем, то подаются два отпирающих импульса: первый в момент естественного отпирания на очередной тиристор, а
второй – в соответствии с величиной α0' на следующий, чем уменьшается запаздывание, присущее этому способу управления.
4. ТРЕБОВАНИЯ К ПОЯСНИТЕЛЬНОЙ ЗАПИСКЕ
Пояснительная записка должна включать следующие разделы:
1)задание на разработку;
2)функциональную схему микропроцессорной системы управления ЭП и ее описание;
3)структурную схему цифровой системы автоматического управления, математическое описание электропривода, обоснование выбора регуляторов, разработку алгоритмов управления и их программную реализацию;
4)функциональную схему заданного устройства сопряжения (АЦП, СИФУ) и его интерфейса, подробное описание их совместной работы;
5)диаграммы сигналов обмена информацией периферийного устройства с ЦП (стандартные циклы Ввод/Вывод).
6)лист принципиальной схемы заданного устройства сопряжения и его интерфейса, краткое описание принципиальной схемы.
Примечание. Обозначения на схеме должны соответствовать ЕСКД, ГОСТ 2.743 – 72 и др. В качестве элементной базы рекомендуется использовать серии современных микросхем.
СПИСОК ЛИТЕРАТУРЫ
1.Комплекты интегральных микросхем: Справочник в 2т./Н. Н. Аверьянов, А. И. Березенко, Ю. И. Боршенко и др.; Под общ. ред. В. А. Шахнова. ɡ М.: Радио и связь, 1988.
ɡ736 с.
2.Хвощ С. Г., Варлинский Н. Н., Попов Е. А. Микропроцессоры и микроЭВМ в системах автоматического управления: Справочник. ɡ Л.: Машиностроение, 1987. – 640 с.
3.Каган Б. М., Сташин В.В. Основы проектирования микропроцессорных устройств автоматики. – М.: Энергоатомиздат, 1987. – 304 с.
4.Сташин В. В., Урусов А. В., Мологанцев О.Ф. Проектирование цифровых устройств на однокристальных микропроцессоров. – М.: Энергоатомиздат, 1990. – 224 с.
36
5.Системы программного управления промышленными установками и робототехническими комплексами: Учеб.\пособ. для вузов/ Г. И. Прокофьев, Л. Н. Рассудов. – Л.: Энергоатомиздат, 1990. – 352 с.
6.Перельмутер В. М., Соловьёв Л. К. Цифровые системы управления тириторным электроприводом. – Киев: Техника, 1983. – 104 с.
7.Цифровая обработка информации на основе быстродействующих БИС/С. А. Гамкрелидзе, А. В. Завьялов, Н. Н. Мальцев, В. Г. Соколов. Под ред. В. Г. Домчарева. – М.: Энергоатомиздат, 1988. – 136 с.
8.Микропоцессорные средства производственных систем/В. Н. Алексеев, А. М. Коновалов, В. Г. Колосов и др.; Под общ. ред. В. Г. Колосова, - Л.: Машиностроение,
1988. – 287 с.
9.Микропроцессоры в 3-х кн. Кн.2. Средства сопряжения. Контролирующие и информационно-управляющие системы.: Учеб.для вузов/В. Д. Вернев, Н. В. Воробьев, А. В. Горячев и др.; Под ред. Л. Н. Преснухина. – М.: Высш. шк., 1983. – 383 с.
10.Федорков Б. Г., Телец В. А. Микросхемы ЦАП и АЦП: Функционирование, параметры, применение. – М.: Энергоатомиздат, 1990. – 320 с.
11.Файнштейн В. Г., Файнштейн З. Г. Микропроцессорные системы управления тиристорными электроприводами/ Под ред. С. В. Слежановского. – М.: Энергоатомиздат,
1986. – 240 с.
12.Микропроцессорные системы автоматического управления/ В. А. Бессекерский, Н. Б. Ефимов, С. И. Зиатдинов и др..: Под общ. ред. В. А. Бессекерского. – М.: Машино-
строение, 1988. – 365 с.
13.Егоров В. Н., Корженевский – Яковлев О. В. Цифровое моделирование систем электропривода. – М.: Энергоатомиздат, 1986. – 168 с.
14.Схемотехника цифровых преобразователей перемещения: Справочное пособие/ В. Г. Домчарев, В. Г. Матвеевский и Ю.В. Смирнов. М.: Энергоатомиздат, 1987. –392 с.
15.Шилло В. А. Популярные цифровые микросхемы: Справочник. – М.: Радио и связь, 1988. – 352 с.
16.Алексеенко А. К., Колембет Е. А.,Стародуб Г. И. Применение прецизионных аналоговых микросхем. – М.: Радио и связь, 1985.
17.Гальперин М. В. практическая схемотехника в промышленной автоматике. – М.: Энергоатомиздат, 1987. – 320 с.
18.Цифровые и аналоговые микросхемы: Справочник/С. В. Якубовский, Л. И. Ниссельсон, В. И. Кулемова и др.: Под рад. С. В. Якубовского. – М.: Радио и связь, 1989. –
496с.
19.Комплектные системы управления электроприводами тяжелых металлорежущих станков/Н.В.Донской, А.А.Кириллов, Я.М. Купчан и др.; Под ред. А.Д. Поздеева. – М.:
Энергия, 1980. – 288 с.
20.Козаченко В.Ф. Микроконтроллеры: руководство по применению 16-разрядных микроконтроллеров Intell MCS-196/296 во встроенных системах управления. ɡ М.: Изд-во ЭКОМ, 1997. – 688 с.
21.Куприянов М.С., Матюшкин Б.Д. Цифровая обработка сигналов: процессоры, алгоритмы, средства проектирования. – СПб.: Политехника, 1998.–592 с.