

Kurs_Rab
.pdf20
N = 2n Ux/Uэ.
При этом цикл работы ПНК заканчивается, конденсатор С интегратора закорачивается через ключ К3 и выдается сигнал Готовность.
3.4. Преобразователи перемещения. В качестве датчиков положения используются обычно датчики типа синус-косинус вращающегося трансформатора (СКВТ) и фотоэлектрические типа ВЕ 178.
3.4.1. Фотоэлектрические датчики. Данные датчики можно разделить на две группы: кодового и импульсного типов. Принцип работы фотоэлектрического импульсного датчика и электрическая схема одного канала формирования импульсов показаны на рис.11.
|
1 пара |
|
фотодиоды |
Растровая инди- |
|
каторная пла- |
|
стина |
2 пара |
линза |
растровый |
|
диск |
U1
светодиод 
|
|
|
|
|
|
|
|
U2 |
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
R3 |
|
|
|
|
|
|
+5В |
|
|
|
|
|
|
|
|
|
|
R4 |
2 |
5 |
6 8 |
7 |
|
|
U1 |
|
|
|
+ |
|
|
|
||
|
|
3 |
А1 |
|
|
|
||
VD2 |
R1 |
_ |
1 |
&1 |
&2 |
U1, |
||
|
|
4 |
|
|||||
VD1 |
R5 |
|
|
R115 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
R9 |
|
|
|
|
Обш. |
|
|
|
|
|
|
|
|
||
C2 |
б |
|
Рис.11. Фотоэлектрический датчик
Канал формирования импульсов построен на базе схемы сравнения типа 521 СА3 (A1) и фотодиода VD1, включенного по схеме источника ЭДС (рис. 11,б). При вращении растрового диска происходит формирование светового потока через линзу, растровую индикаторную пластину и растровый диск (рис.11,а). Интенсивность светового потока при равномерном вращении изменяется по синусному закону (рис.11,в). Для формирования импульсов используются две пары светодиодов, каждая из этих пар сдвинута относительно друг друга на 90°. На индикаторной пластине растры расположены в два сектора, сдвинутых относительно друг друга на ¼шага. Фотодиод VD2 каждого из каналов предназначен для решения задачи термостабилизации.
21
На выходах формируются прямоугольные импульсы, сдвинутые относительно друг друга на 90°, что позволяет определить направление движения.. Схема сравнения А1 представляет из себя ОУ с большим коэффициентом усиления, выходной каскад которого выполнен на основе транзистора с открытым коллектором. Это позволяет осуществлять согласование ее выходного сигнала с уровнем ТТЛ.
Для увеличения разрешающей способности импульсы с датчика подаются на схему учетверения, с помощью которой осуществляется выделение направления движения и формирования учетверенной последовательности импульсов.
3.4.2.Основные режимы работы датчиков положения типа СКВТ. В
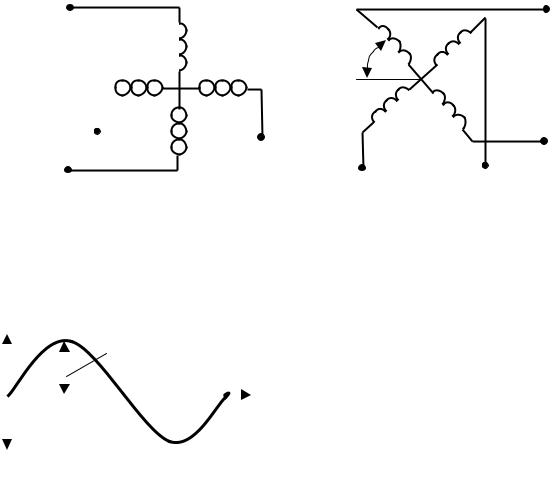
преобразователях перемещения в качестве датчиков широко используются линейные и круговые датчики трансформаторного типа, принцип действия которых основан на изменении взаимной индукции между двумя системами обмоток. Особый интерес представляют многополюсные синуснокосинусные вращающиеся трансформаторы (СКВТ) с электрической редукцией, позволяющие повысить точность измерения за счет усреднения технологических погрешностей изготовления. В станкостроении широко используются линейные индуктосины, по принципу действия подобные СКВТ, развернутому в плоскости. На рис.12 представлены статорные и роторные обмотки синусно-косинусного вращающегося трансформатора.
θ |
Uр1 |
|
Uс1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uр2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uс2 |
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Рис. 12. Схема обмоток СКВТ |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
В зависимости от питающих напря- |
|
Uc1 = Eo sin ωt |
|
|
|
|
|
|||||||||
|
|
|
|
|
жений различают следующие |
основные |
||||||||
Up1 = kEo sin θsin ωt |
|
|
|
|
|
режимы работы СКВТ: |
|
|||||||
Up2 = kEo cos θsin ωt |
|
|
|
|
|
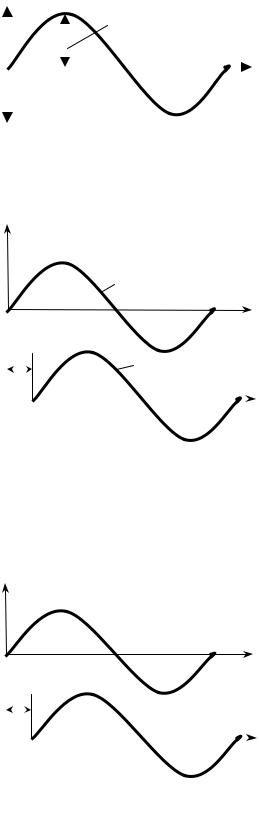
1) амплитудно-индикаторный режим. Ос- |
||||||||
|
|
|
|
|
|
|
|
|
|
новным достоинством этого режима явля- |
||||
|
|
|
|
kEo sin θ |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ется простота питания. Недостатком данно- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
го режима является то, что для формирова- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
ния сигналов рассогласования между за- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
дающим сигналом положения ротора и его |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
истинным значением требуется |
сложная |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.13. Амплитудно- |
|
|
|
|
|
обработка (рис. 13). |
|
|||||||
индикаторный режим работы |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
Uc1 = -E0 sinΨ sinωt |
|
2) амплитудно-разностный режим. Здесь Ψ |
||||||||
|
|
|
Uc2 = -E0cosΨsinωt |
|
угол задания положения ротора. Выходные |
||||||||
|
|
|
Up1 = kE0sin(Ψ-θ)sinϖt |
|
напряжения представляют собой модулиро- |
||||||||
|
|
|
Up2 = kE0cos(Ψ-θ)sinωt |
|
ванное значение синусных сигналов (рис. 14). |
||||||||
|
|
|
|
|
|
Е0sin(ψ-θ) |
|
В данном случае датчик выполняет функцию |
|||||
|
|
|
|
|
|
|
сравнивающего устройства углов задания и |
||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
обратной связи, что позволяет устранять |
|
|
|
|
|
|
|
|
|
|
|
|
|
влияние погрешности промежуточных узлов |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
формирования выходного сигнала. Этот ре- |
|
|
|
|
|
|
|
|
|
|
|
|
|
жим относится к классу наиболее точных. Он |
|
|
|
|
|
|
|
|
|
|
|
получил распространение в следящих систе- |
||
|
Рис.14. Амплитудно-разностный |
||||||||||||
|
режим работы СКВТ |
|
мах с динамическим уравновешиванием. |
||||||||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3) фазовый индикаторный (фазовращатель- |
|
|
|
Uc1 = E0sinωt |
|
|||||||||
|
|
|
|
ный). Этот режим наиболее распространен, |
|||||||||
|
|
|
Uc2 = -E0cosωt |
|
т.к. позволяет измерять непосредственно ли- |
||||||||
|
|
|
Up1 = kE0sin(ωt±ψ) |
|
|||||||||
|
|
|
|
нейные перемещения. Измерение осуществ- |
|||||||||
|
|
|
Up2 = kE0cos(ωt±ψ) |
|
|||||||||
|
|
|
|
ляется относительно опорного (рис. 15), в |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Up2 |
|
|
|
|
качестве которого может быть использовано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
напряжение питания первичной обмотки. К |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ψ |
|
достоинствам данного режима относится |
||||||||
|
|
|
|
возможность использования одного и того |
|||||||||
|
|
|
|
|
|
|
Up2 |
|
же источника питающего напряжения для |
||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
группы датчиков, а недостатки связаны с вы- |
|
|
|
|
|
|
|
|
|
|
|
|
|
сокими требованиями к стабилизации пи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
тающих напряжений и к каналу формирова- |
|
|
|
|
|
|
|
|
ния сигналов обратной связи, т.к. выходной |
|||||
|
Рис.15. Работа СКВТ в режи- |
|
|
||||||||||
|
ме фазовращателя |
|
|
|
сигнал имеет переменную частоту, завися- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
щую от скорости изменения фазы. |
|
|
|
Uc1 = E0sin(ωt+θ) |
|
|||||||||
|
|
|
|
|
|||||||||
|
|
|
Uc2 = -E0cos(ωt+ω) |
|
|
||||||||
|
|
|
Up1 = kE0sin(ωt+(θ-ψ)) |
|
|
||||||||
|
|
|
Up2 = kE0sin(ωt-(θ-ψ)) |
|
4) фазово-разностный режим. В этом режиме |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
датчик работает как сравнивающее устрой- |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
ство. Необходимая информация об ошибке |
|
|
|
|
|
|
|
|
|
|
|
|
|
по углу находится в фазе выходного напря- |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
θ-ψ |
|
жения. В установившемся режиме работы |
||||||||
|
|
|
|
частота выходного сигнала датчика не зави- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сит от скорости перемещения привода. Это |
|
|
|
|
|
|
|
|
|
|
|
|
|
облегчает фильтрацию выходного напряже- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния, что важно при питании датчика прямо- |
|
|
|
|
угольными импульсами. |
|||||||||
|
|
Рис.16. Работа СКВТ в фазово- |
|
|
|||||||||
|
|
разностном режиме |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23
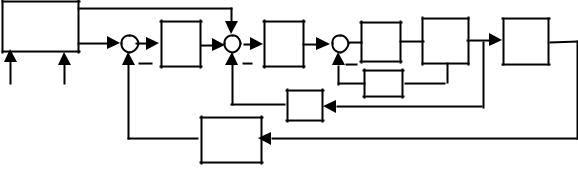
3.5. Цифровые регуляторы. В качестве примера рассмотрим организацию электропривода подачи в системах числового программного управления (ЧПУ). Отработка заданного положения в контурных системах ЧПУ осуществляется с помощью следящего ЭП, в качестве задатчика координат соответствующих требуемому положению используется интерполятор (см. рис. 17). С помощью интерполятора решаются задачи развертки заданных перемещений во времени, одновременно с этим решаются задачи пуска и торможения с заданным темпом приращения скоростей и ускорений.
|
|
Vзх |
|
|
|
|
|
Интер |
NЗΧ |
|
|
ω |
|
Χ |
|
полятор |
|
|
|
||||
|
|
РП |
РС |
РТ |
ЭП |
ДП |
|
NΧ* |
|
VХ |
|
KI |
I |
|
|
Vx* |
Kω |
|
|
|
|
||
|
|
NΧ |
|
|
|
|
|
|
|
ПФК |
|
|
|
|
|
|
Рис. 17. Организация следящего привода подачи в системах ЧПУ |
|
|||||
Ввод информации в интерполятор осуществляется кадр за кадром. При этом в кадре управляющей программы содержится информация по перемещению NΧ и о скоростях Vx подачи.
Рассматриваемая цифровая система построена по принципу подчиненного регулирования параметров и содержит три контура: положения, скорости и тока. В каждом из контуров содержится соответственно регулятор положения (РП), скорости (РС) и тока (РТ). Регулятор положения обычно реализуется программным способом, а контроль положения осуществляется с помощью датчика положения (ДП) и преобразователя фаза-код (ПФК). Регуляторы скорости и тока целесообразно при прямом цифровом управлении выполнить автономно на базе микроконтроллера. Зависимое токоограничение осуществляется путем введения в регулятор скорости звена ограничения. При настройке всех трех контуров тока, скорости и положения на модульный оптимум будем иметь следующие передаточные функции регуляторов:
тока
WPT ( p) = |
|
RЭ(T Э × p + 1) |
, |
||||
|
|
|
|
||||
|
|
k μ k I × 2 ×T μ × p |
|
||||
скорости |
|
|
|
|
|
|
|
WPC ( p) = |
|
|
kI |
J |
|
||
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
||
|
kω cФ2T∑ I |
|
|||||
положения |
|
|
kω |
|
|||
WРП ( p) = |
|
|
|||||
|
|
|
, |
|
|
||
|
|
|
|
|
|||
|
|
|
kΨ 2T∑ω |
|
|||
24
где kI , kω , kΨ соответственно коэффициенты передачи датчика тока, скорости и положения; Tμ , Tэ постоянные времени усилителя мощности и якорной цепи двигателя; T∑ I , T∑ω суммарные постоянные контуров тока и скорости; Rэ, J , Ф сопротивление якорной цепи, момент инерции и пото-
косцепление двигателя Синтез структуры регулирования для каждого конкретного механизма
имеет свои особенности в силу специфических требований, предъявляемых к электроприводу со стороны объекта управления. Требованиям глубокого регулирования скорости удовлетворяют астатические структуры. Повышение астатизма возможно как за счет соответствующих настроек внутренних контуров, так и путем выбора ПИ или ПИД-регулятора во внешнем контуре. В практике вентильных приводов для станкостроения широко используются структуры с настройкой на максимальное быстродействие [19]. При этом в контурах скорости и положения используют ПИ-регуляторы для обеспечения необходимых статических и динамических показателей. Для оптимизации структур в режиме прерывистого тока используют адаптивные регуляторы с перестраиваемой структурой и нелинейные регуляторы.
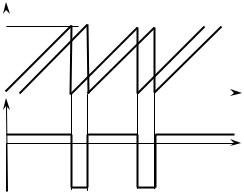
3.5.1.Алгоритмы реализации следящего электропривода. Основной
особенность реализации следящих систем является то, что сигналы задания и обратной связи при равномерном дви-
|
ϕз |
ϕ |
жении представляют собой периодиче- |
||
|
|||||
|
|
|
|
скую развертку двоичного кода (рис. |
|
|
|
|
|
18). Для удобства отсчета измерение |
|
|
|
|
|
обычно осуществляют в двоично- |
|
Δϕ |
|
|
десятичной системе. |
В этом случае |
|
|
|
сигнал задания с интерполятора и об- |
|||
|
|
|
|
||
|
|
|
|
ратной связи с ПФК будут представ- |
|
|
|
|
|
лять неполный двоичный код. |
|
|
|
|
|
Это предъявляет |
соответствующие |
Рис. 18. Диаграммы развертки сиг- |
требования к формированию сигнала |
||||
налов задания и обратной связи по |
задания и обработке кода ПФК. При |
||||
положению |
|
|
формировании ошибки рассогласова- |
||
ния возможны два случая: движение в прямом и обратном направлении. При реализации алгоритма необходимо предусмотреть особенности формирования ошибки при переходе фаз через их максимальные и минимальные значения.
3.5.2.Алгоритм регулятора положения. Информация с ПФК читается
ввиде двух слов (рис.19), которые загружаются в регистры R3, R2. Для организации следящей системы необходима информация только о младших раз-
рядах, которая соответствует периоду 2π. Эта информации будет соответствовать младшему слову ПФК. С учетом того, что код, характеризующий положение представлен двоично-десятичными числами, а для организации опе-

25
раций вычисления используются двоичные числа, информация с ПФК преобразуется с помощью преобразователей кодов.
начало
Младшее слово ПФК в R3 Старшее слово ПФК в R2
Загрузка признака 2-10/2 преобразования в РС ПК (преобразование кодов)
R3 ®РД ПК
Результат ® j
Вычисление ошибки
Dj = jз - j
|
|
нет |
|
Dj>jmax/2 |
да |
|
||||
Dj<- jmax/2 |
да |
|
|
|||||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
нет |
|
|
|
|
|
|
Dj = D`j + 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nϕ = b × Dj
Nu = Nϕ + Nw
Nu > 0 |
да |
|
 нет
нет
Nu V100000 ® NU
Вывод на ЦАП
возврат
Рис. 19. Алгоритм регулятора положения
Признак преобразования двоично-десятичных чисел в двоичные загружается в регистр состояния РС преобразователя кодов (ПК), после чего производится загрузка R3 в его регистр данных. Преобразование чисел про-
26
n
граммным способом можно осуществить по формуле N = ∑ ai qi , где
i =0
ai = 0 ÷ q − 1, q основание системы счисления. Цикл преобразователя
включает чтение результата преобразования в ячейку j. Затем вычисляется ошибка Dj между сигналом заданного положения jз и сигналом обратной связи. С учетом циклической развертки задающего сигнала и обратной связи производится обработка ошибки в моменты перехода задающего сигнала с максимального значения на минимальное или наоборот. Если ошибка по положению Dj превышает максимально возможное значение jmax/2, то для восстановления сигнала ошибки до нормального уровня формируется дополнительный код ошибки Dj. Алгоритм предусматривает реализацию П- регулятора, в соответствии с которым реализуется операция перемножения NΧ5b ÑC. При реализации алгоритма регулятора используется целочисленная арифметика. При этом входные величины и коэффициенты можно масштабировать, исходя из требуемой точности их представления. Если b представить в виде восьмиразрядного числа, то можно получить 256 его значений.
Выходной сигнал при перемножении восьмиразрядного и шестнадцатиразрядного числа будет представлен двадцатичетырехразрядным результатом. Выход ЦАП позволяет преобразовывать в лучшем случае шестнадцатеричные числа. Поэтому приходится производить загрубение системы путем использования только старших разрядов или снижать диапазон допустимых значений сигнала управления. В последнем случае необходим анализ насыщения регулятора при выходе сигнала ошибки из допустимого диапазона.
Информация на ЦАП поступает в виде знакового модуля, поэтому в случае отрицательного числа формируется его дополнительный код и в старший разряд загружается признак отрицательного числа. Старший разряд при этом в ЦАП используется для переключения выходного сигнала через дополнительный инвертирующий усилитель. Другой возможный вариант связан с использованием знакового разряда для изменения знака опорного напряжения ЦАП.
3.5.3.Переход к дискретному регулятору по непрерывному прототипу.
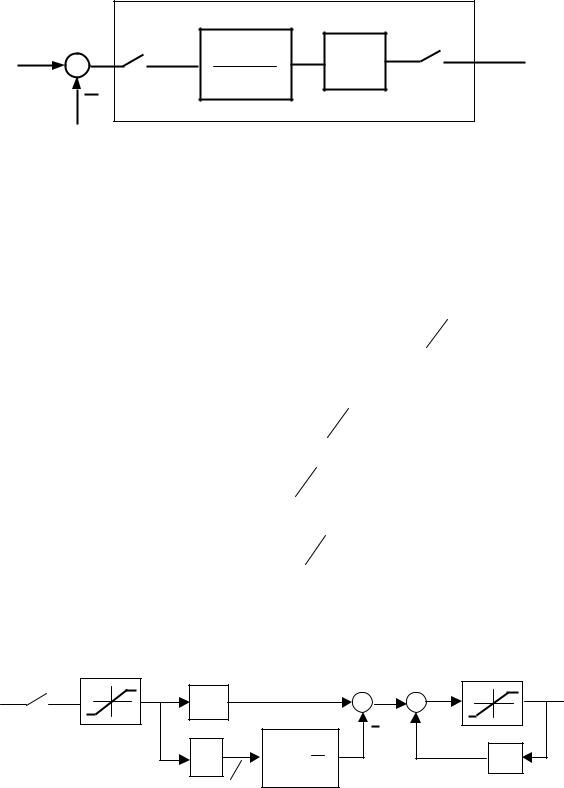
При синтезе системы управления электроприводом могут быть использованы различные подходы, принятые в инженерной практике проектирования непрерывных систем регулирования, конечным итогом которых является выбор регулятора. Переход к дискретному регулятору от аналогового прототипа может быть осуществлен путем дискретной аппроксимации последнего. На рис. 20 показана структурная схема дискретного регулятора W p (z) , свойства
которого приближены к соответствующему непрерывному W p ( p) за счет
введения фиксирующего звена Wo ( p) нулевого порядка, восстанавливающего информацию между интервалами квантования.
|
|
|
|
27 |
|
Nзω |
|
X(z) |
1 − е |
−Тр |
Y(z) |
|
|
|
|||
|
|
|
|
W p ( p) |
|
|
|
|
р |
|
|
|
|
|
|
W p (z) |
|
|
Nω |
Рис.20. Структурная схема ПИ-регулятора |
|
||
|
|
|
|||
Дискретная передаточная функция регулятора находится c использованием Z- преобразования в виде изображения последовательного соединения звеньев
|
|
|
y(z) |
|
|
|
− e |
−Tp |
|
|
|
|
|
|
− e |
−Tp |
|
|
|
|
|
|
|
z − 1 |
|
τ p |
|
|
|
||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
τp + 1 |
|
|
|
+ 1 |
|
|||||||||||||||||
W p (z ) = |
|
|
|
= Z |
|
|
|
|
|
W p ( p) |
= Z |
|
|
|
|
|
β |
|
|
|
|
= |
|
|
|
Z β |
|
|
|
= |
|||||||||
x(z) |
|
|
p |
|
|
|
p |
|
|
τp |
|
|
|
|
τp |
2 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
)z −1 |
|
|
|
|
||||
|
z − 1 |
|
|
1 |
|
|
|
|
z |
− 1 |
|
z |
|
|
Tz |
|
|
|
|
|
1 − (1 − T |
τ |
|
|
|
|
|
||||||||||||
= β |
1 |
+ |
|
|
= β |
|
+ |
|
|
|
|
= β |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
||||||||||
z |
|
τp2 |
|
|
|
|
τ (z − |
1)2 |
|
1 − z |
−1 |
|
|
|
|
||||||||||||||||||||||||
|
p |
|
|
|
|
|
z z − 1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Раскроем передаточную функцию
(1 − z −1 )y(z ) = β (1 − (1 − T τ )z −1 )x(z ),
иначе
y(z ) = β x(z ) − β (1 − T τ )z −1x(z ) + z −1 y(z ) .
Используя теорему запаздывания и упреждения получим
y[n]= β x[n]− β (1 − T τ )x[n − 1]+ y[n − 1].
Решение разностного уравнения можно реализовать на основе структур с многомерным входом или выходом. На рис. 21 показана одна из структур прямого (непосредственного) программирования полученного рекуррентного уравнения.
* |
xn |
β |
, |
|
|
yn* |
yn |
xn |
|
xn |
|
|
|
|
|
|
|
z −1 |
β (1 − |
T |
|
yn−1 |
−1 |
|
|
τ ) |
, |
z |
|||
|
|
xn−1 |
|
|
xn−1 |
|
|
|
|
|
|
|
|
|
Рис. 21. Структура непосредственного программирования
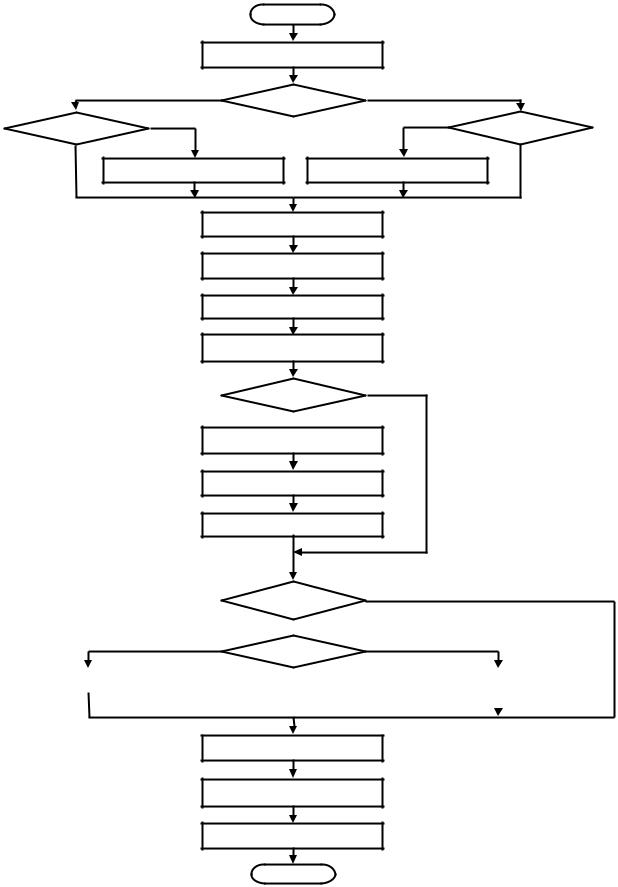
3.5.4.Алгоритм регулятора скорости. Вхождение в алгоритм регуля-
тора (рис.22) осуществляется по прерыванию от таймера. После вычисления ошибки между сигналом задания скорости и обратной связи по скорости производится ее анализ на превышение значений ограничения.
|
28 |
|
|
|
начало |
|
|
|
X[n] = NЗω [n] - Nω [n] |
|
|
Нет |
x[n] > 0 |
Да |
|
|
|
|
|
Да |
|
Да |
x[n] > x0 |
x[n] > -x0 |
|
|
|
Нет |
|
x[n] ← x0 |
Нет |
x[n] ← -x0 |
|
|
|
|
x’[n] ← βx[n] |
|
|
z[n] ← x[n] - x’[n - 1]
y[n] = y[n - 1] + z[n]
y*[n] = y[n], y’[n] ← y[n]
Да
y[n] > 0
 Нет
Нет
y*[n] ← y*[n] + 1
y’[n] ← y*[n]
y’[n] ← y’[n] v100000
Нет
y*[n] > y0
 Да
Да
Нет Да y[n] > 0
y[n] ← - y0 |
|
y[n] ← y0 |
|
|
|
|
|
y[n-1] ← y[n]
x’[n-1] ← β(1-T/τ)x[n]
Вывод y’n на РД ЦАП
возврат
Рис. 22. Алгоритм регулятора скорости
29
Если ошибка меньше уровня ограничения, то алгоритм идет по обходной ветви, иначе значение ограничения присваивается вычисленной ошибке. После вычисления промежуточных величин происходит формирование выходной переменной.
Накопление интегральной составляющей производится также с учетом ограничений по входному сигналу. При обработке данного участка алгоритма с помощью промежуточных переменных y*[n], y'[n] определяют знак и величину модуля. При этом знак формируется в 15 разряде 16-разрядного числа выходной переменной путем принудительной его установки, а остальные разряды используются для формирования модуля. Далее идет вывод информации на ЦАП и переприсвоение значения переменных.
3.6.Тиристорные преобразователи
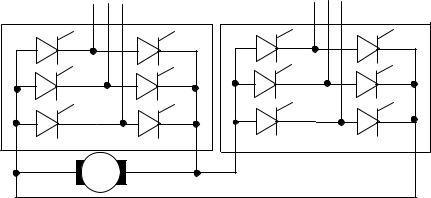
3.6.1. Принципы управления управляемыми выпрямителями. В зависимо-
сти от силовой схемы реверсивного тиристорного преобразователя постоянного тока используется совместное или раздельное управление вентильными комплектами. При совместном управлении углы управления комплектами согласованы α1 + α2 = π . Если один комплект работает в выпрямительном
режиме, то другой в этом случае подготовлен для работы в инверторном режиме. Это позволяет достаточно просто обеспечить рекуперацию энергии в сеть и устранить причины возникновения прерывистых токов в нагрузке. Однако уравнительные токи между комплектами приводят к значительным потерям в обмотках дополнительных дросселей и питающего трансформатора. При раздельном управлении управляющие импульсы подают только на один комплект (рис. 22). Причем переключение на другой комплект возможно лишь при переходе тока нагрузки через нуль, т.е. через некоторое время, соответствующее бестоковой паузе.
А В С |
|
А В С |
|
-А |
+А |
-А |
+А |
-В |
+В |
-В |
+В |
-С |
+С |
-С |
+С |
Комплект 1 |
|
Комплект 2 |
|
Рис. 23. Схема реверсивного ТП с раздельным управлением мостами |
|||
Значение выпрямленной ЭДС тиристорного преобразователя определяется углом отпирания тиристора α , отсчитываемым от точки естественной коммутации