

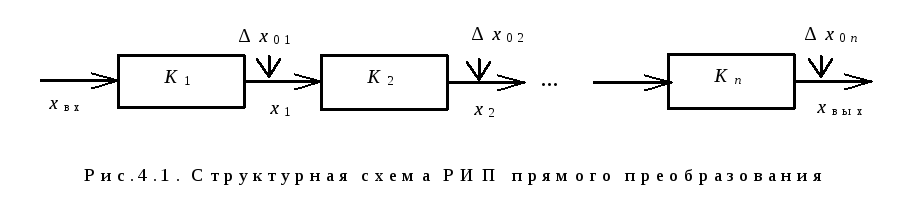
4.1. Структурная схема прямого преобразования
Отличительная черта схемы прямого преобразования (рис. 4.1) состоит в том, что все преобразования производятся в прямом направлении, то есть предыдущие преобразуются в последующие, а преобразование в обратном направлении отсутствует. Такая схема применяется в приборах с ручным уравновешиванием. При этом уравновешивание (сравнение) производится по последней из преобразованных величин. Так, например, в электронном осциллографе амплитуда измеряемого напряжения, выражаемая в вольтах, преобразуется в конечном счете в длину преображения по оси Y, выражаемую в сантиметрах. Сравнение амплитуд напряжений в осциллографе производится путем сравнения размеров изображений по оси Y.
На
схеме рис. 4.1 K1,
..., Kn
- это преобразователи с коэффициентом
преобразования K1,
..., Kn.
Здесь
![]() ,
где
xi
– 1
и
xi
- входной
и выходной сигналы i-го
преобразователя.
,
где
xi
– 1
и
xi
- входной
и выходной сигналы i-го
преобразователя.
Входной сигнал xвх, несущий информацию об измеряемой ФВ, последовательно преобразуется в промежуточные сигналы x2, ..., xn –1 и в выходной сигнал xn. В РИП сигналы xвх, xi, xвых часто представляют собой гармонически изменяющиеся ток или напряжение. Поэтому коэффициенты преобразования Ki в общем случае выражаются комплексными числами. Для простоты предположим, что информативным параметром сигнала является амплитуда. Тогда Ki - это вещественные числа. Сделаем также весьма существенное ограничивающее предположение, а именно: коэффициент преобразования не зависит от интенсивности (амплитуды) сигнала, то есть преобразователи считаются линейными относительно выходной и входной ФВ. Очевидно, что в этом случае коэффициент преобразования схемы
K = ПKi , (4.2)
а уравнение, связывающее xвх и xвых имеет вид
xвых = K xвх . (4.3)
На работу схемы будут оказывать влияние изменения коэффициентов преобразования ΔKi, а также помехи и наводки Δx0i. Оценим величину погрешностей, возникающих из-за наличия ΔKi, Δx0i. При этом будем рассматривать суммарную погрешность Δ, то есть содержащую систематическую и случайную составляющие
Δ = Δ случ + Δ сист . (4.4)
Абсолютная погрешность измерения выходной величины Δ xвых, обусловленная нестабильностью коэффициентов преобразования, может быть определена как погрешность косвенного измерения с учетом выражений (4.2) и (4.3).
Δ xвых = xвх (K2K3 …KnΔK1 + K1K3 …KnΔK2 +… K1K2 …Kn–1ΔKn), (4.5)
где ΔKi - нестабильность коэффициента преобразования i-го звена.
Как видно из (4.5), абсолютная погрешность Δ xвых является мультипликативной, то есть пропорциональна уровню выходного сигнала. Относительная мультипликативная погрешность
![]() , (4.6)
, (4.6)
где
![]() - относительная нестабильность
коэффициента преобразования схемы.
Результирующая относительная погрешность
равна сумме относительных погрешностей
преобразователей.
- относительная нестабильность
коэффициента преобразования схемы.
Результирующая относительная погрешность
равна сумме относительных погрешностей
преобразователей.
Очевидно,
относительные погрешности как приведенные
к входной, так и приведенные к выходной
величине, равны, если зависимость
![]() линейна,
то есть справедливо выражение (4.3). В
общем случае коэффициент преобразования
схемы определяется как
линейна,
то есть справедливо выражение (4.3). В
общем случае коэффициент преобразования
схемы определяется как
![]() и
в случае, если
и
в случае, если![]() -
нелинейная зависимость, то
-
нелинейная зависимость, то
![]() и
и![]() ,
а
,
а
![]() . (4.7)
. (4.7)
Оценим теперь погрешности, обусловленные помехами и наводками. На схеме рис. 4.1 источники погрешностей показаны в виде дополнительных сигналов Δx01, Δx02, ..., Δx0n. Результирующее действие этих сигналов эквивалентно действию дополнительного сигнала на выходе
![]() . (4.8)
. (4.8)
Это аддитивная погрешность, не зависящая от уровня входного сигнала.
Таким образом, как следует из (4.6) и (4.8), в схемах прямого преобразования происходит суммирование погрешностей, вносимых отдельными звеньями. Для достижения высокой точности требуется высокая стабильность всех звеньев.