

Последовательные измерения
Вектор момента L можно охарактеризовать:
а) |
проекциями на декартовы оси: |
||
|
L = LX • i + LY • j + LZ • k = (LX, LY, LZ), |
||
б) |
модулем (длиной): |
|
|
|
| L |2 = (L )2 |
+ (L )2 |
+ (L )2 |
|
X |
Y |
Z |
В классической (МАКРО-) механике все 4 числа (модуль и три проекции) можно определить независимо и проверить экспериментально

 L
L
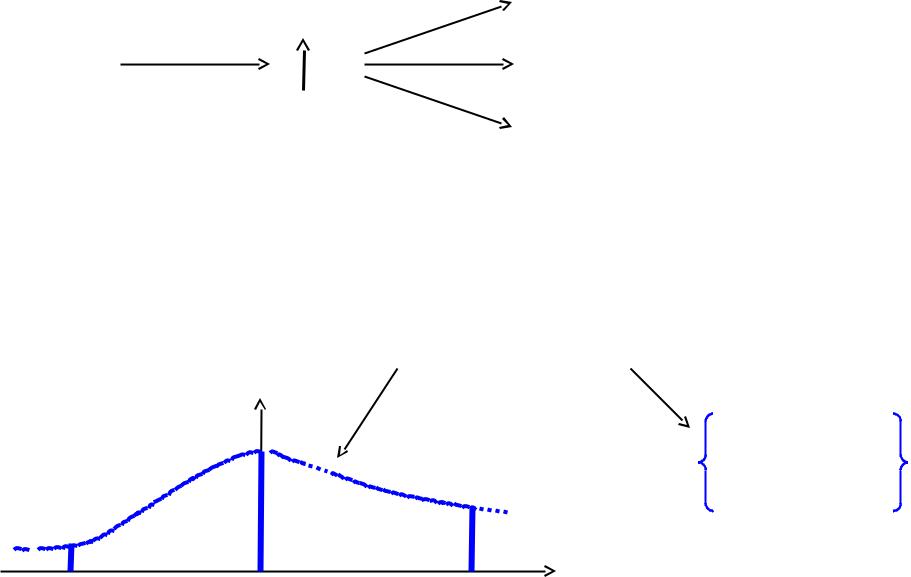
В квантовой (МИКРО-) механике любые измерения требуется производить ПОСЛЕДОВАТЕЛЬНО, что обусловлено конструкцией спектральных анализаторов (например, прибора Штерна-Герлаха)
Поставим два вопроса:
Чему равна величина проекции SZ ? Чему равна величина проекции SY ?
Для нахождения ответа нужно провести ДВЕ процедуры измерения с помощью ДВУХ приборов Штерна-Герлаха, ориентированных по осям Z и Y, соответственно.
(источник частиц — один и тот же)

| Φ |
|
| +Z |
(SZ = + ) |
|
|
|
|
||
Z |
| оZ |
(SZ = 0 ) |
||
|
||||
|
|
| –Z |
(SZ = – ) |
|
|
|
| Φ |
= | +Z Z+ |
+ | оZ Zо |
+ | –Z Z– = (Z+, Zo, Z–) |
|
| Z+ |2 = Р+ ; | Zо |2 = Ро ; | Z– |2 = Р– |
|
|||
|
|
Функция распределения PZ |
|
|
|
PZ |
|
+ , 0, – |
|
|
|
|
S = |
|
|
|
|
Z |
Р+, Ро, Р– |
|
|
|
|
|
– |
0 |
+ |
SZ |
|
| Φ |
|
| +Y |
(SY = + ) |
|
|
|
|
||
Y |
| оY |
(SY = 0 ) |
||
|
||||
|
|
| –Y |
(SY = – ) |
|
|
|
| Φ |
= | +Y Y+ |
+ | оY Yо |
+ | –Y Y– = (Y+, Yo, Y–) |
|
| Y+ |2 = Р+ ; | Yо |2 = Ро ; | Y– |2 = Р– |
|
|||
|
|
Функция распределения PY |
||
|
PY |
|
+ , 0, – |
|
|
|
|
S = |
|
|
|
|
Y |
Р+, Ро, Р– |
|
|
|
|
|
– |
0 |
+ |
SY |
|
| +Z
|+Z
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| +Z |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| оZ |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| –Z |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| +Y |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| оY |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| –Y |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
PY |
|
|
|
|
|
|
|
|
|
|
|
|
|
PZ |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
||||||||||||||||||||
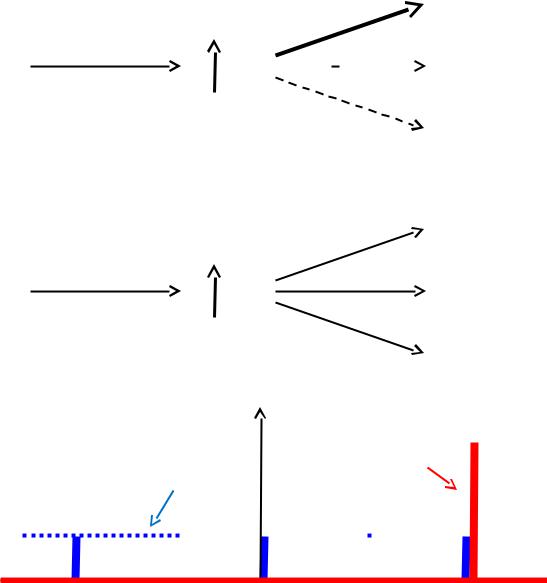
(SZ = + ) P+ = 1
(SZ = 0 ) |
Po = 0 |
(SZ = – ) |
P– = 0 |
(SY = + ) |
P+ = 1/3 |
(SY = 0 ) |
Po = 1/3 |
(SY = – ) |
P– = 1/3 |
 SZ SY
SZ SY
| +Y
| +Y
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
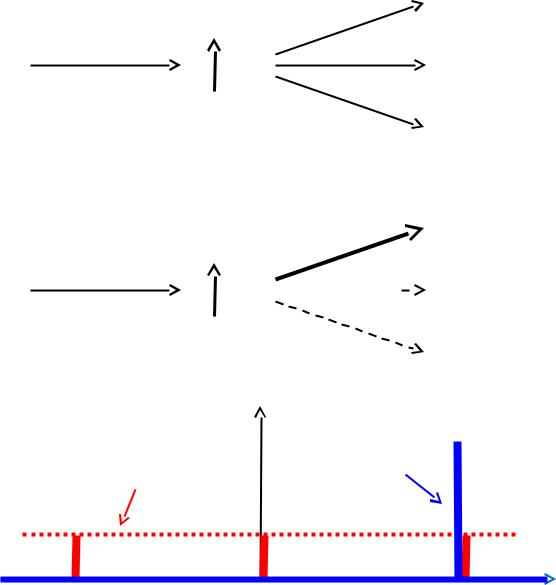
| +Z |
(SZ = + ) |
P+ = 1/3 |
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| оZ |
(SZ = 0 ) |
Po = 1/3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| –Z |
(SZ = – ) |
P– = 1/3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| +Y |
(SY = + ) P+ = 1 |
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| оY |
(SY = 0 ) |
Po = 0 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| –Y |
(SY = – ) |
P– = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
P |
|
|
||||||||||||||||||
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
PY |
|
|
||||||
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
0 |
+ |
SZ SY |
|
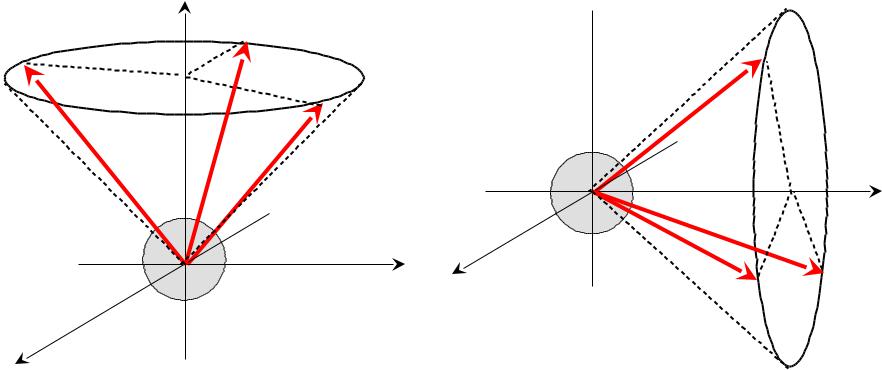
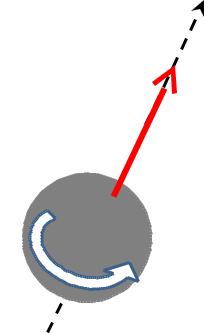
Вектор момента (спина) и процедура измерения
|
LZ |
|
|
LY |
= ? |
LX |
= ? |
|
LZ = ? 
LY
LX = ?
Определение ориентации вектора момента (спина) требует наложения внешнего магнитного поля (прибор ШГ), что приводит к вращению вектора L ( или S) вокруг той оси, вдоль которой ориентирован градиент напряженности внешнего поля. В итоге одна из проекций оказывается фиксированной, а все остальные — неопределенными.
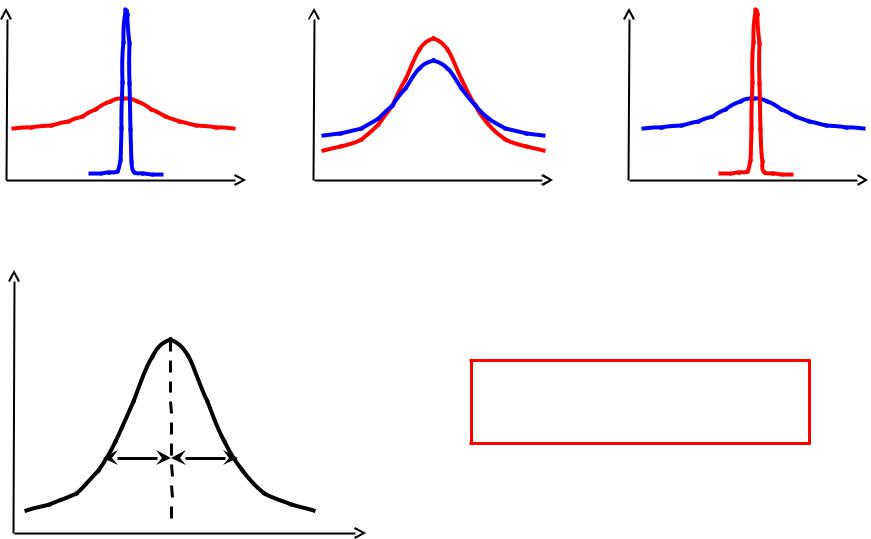
Взаимосвязь функций распределения
P P P
– |
SZ |
– |
SZ |
– |
SZ |
0 + SY |
0 + SY |
0 + SY |
— «полуширина» ФР
Z • Y const
|
|
СООТНОШЕНИЯ НЕОПРЕДЕЛЕННОСТЕЙ |
(В. Гейзенберг)
«ПРИНЦИП НЕОПРЕДЕЛЕННОСТИ» ГЕЙЗЕНБЕРГА
Существуют связанные пары наблюдаемых [A, B], которым невозможно одновременно приписать точные числовые значения
A = Ai |
B = Bj |
так как уменьшение неопределенности для одной из таких наблюдаемых ( A ) вызывает увеличение
неопределенности в значении другой ( B ).
Какие именно пары наблюдаемых связаны между собой «принципом неопределенности», а какие — нет?
≠ 0 |
(связаны) |
САВ = [A, B ] = A • B – B • A |
(не связаны) |
= 0 |
Причина: не коммутирующие операторы не имеют совпадающих собственных векторов, т.е. состояние, собственное для прибора А, обязательно будет несобственным для другого прибора В.
Следствие:
анализ собственного состояния прибора А
(т.е. когда наблюдаемая А = Аi )
спомощью другого прибора В обязательно приведет к результату в виде не конкретного числа Bi, а функции
распределения |
|
В1, В2, … , Вn |
|
В |
= |
||
Р1, P2, … , Рn |
|||
|
|
|
А = А1 |
|
|
А |
А = Аi А |
А = Аi А |
А = Аi |
|
А = Аn |
|
|
|
|
|
|
|
|
|
|
А = А1 |
|
А = Аi |
|
|
|
B = Bi |
|
|
|
А = Аi |
|
|
B |
А |
|||||||
|
|
|
А = Аn |
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
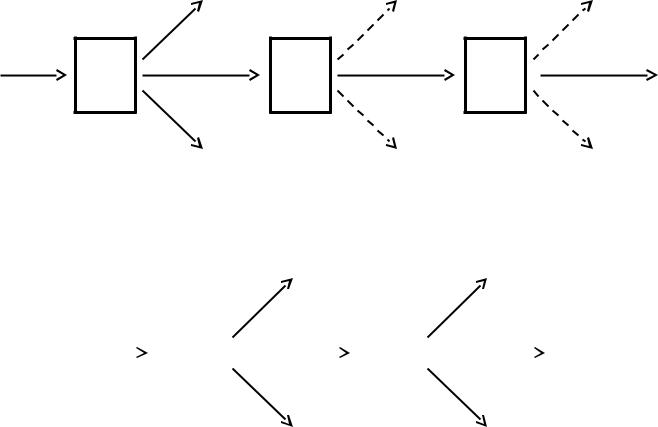
Повторные
измерения наблюдаемой А не изменяют ее величину
Измерение наблюдаемой В изменяет ранее измеренную и точно известную величину наблюдаемой А
Аналогично, измерение наблюдаемой А изменяет измеренную и точно известную величину наблюдаемой В